《深入理解Android》导读之init
1. 概述
init做了很多事情,在很多修改驱动,或者对系统作一些修改的时候,经常会对init.rc进行修改,因此,无论做系统研究,还是作平台性的修改,这部分都很重要。另外,《深入理解》是根据2.3的版本写的代码分析,我再根据4.0相应的代码做了类似的分析和修改。
这章主要讲了两个方面,init如何创建zygote和init的属性服务是如何工作的。我个人最大的收获,是系统地读了下init的工作流程,当然,原来看过对init.rc的语法分析的东西,相对有点帮助,可以看得稍微快一点。
init的源文件多放在system/core/init下, init.rc放在system/core/rootdir/init.rc下,当然,不同平台(device)的init.rc放在device/下。
2. init 分析
整理init.c 里的main函数,按顺序做了下面这些事情(没有一件一件罗列,只是把关注的和主要的列了下):
a. 建立一些根目录下必需的目录,其他目录从init.rc中读取建立 ——>
b. 重定向标注输入/输出/错误输出到/dev/_null_ (open_devnull_stdio()) ——>
c. 设置init的日志输出设备(klog_fd)为/dev/__kmsg__,设置完后马上unlink,其他进程就无法打开这个文件读取日志信息了(klog_init())——>
d. 分析init.rc以及init.hardware.rc得到一系列的action(parse_config_file())——>
e. 把early-init阶段的action加到全局定义的action_queue (init_parser.c) 里——>
f. 通过调用queue_builtin_action()把wait_for_coldboot_done_action, property_init_action, keychord_init_action, logo_init_action, console_init_action, set_init_propertyes_action加到action_queue 里 ——>
g. 把init段的action加到action_queue里(action_for_each_trigger("init", action_add_queue_tail);)——>
h. 把property_service_init_action, signal_init_action, check_startup_action, 加到action_queue 里 ——>
i. 如果为charger模式,则把charger加到action_queue里,否则把early-boot, boot加到action_queue里 ——>
j. 把queue_property_triggers_action加到action_queue里,否则把early-boot, boot加到action_queue里 ——>
k. 进入无限for循环,通过执行execute_one_command()按序执行action_queue里的action,每执行完一个action,就会调用一次restart_processes(), (如果action_queue里的action已经完成,则不做action,只是不断监听事件,作为“天字一号”程序运行),只是如下:
execute_one_command(); restart_processes();
并且根据需要来设置ufds[], 分别监听来自属性服务器,由soketpair创建的另一个socket,keychord设备这三个事件
if (!property_set_fd_init && get_property_set_fd() > 0) {
ufds[fd_count].fd = get_property_set_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
property_set_fd_init = 1;
}
if (!signal_fd_init && get_signal_fd() > 0) {
ufds[fd_count].fd = get_signal_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
signal_fd_init = 1;
}
if (!keychord_fd_init && get_keychord_fd() > 0) {
ufds[fd_count].fd = get_keychord_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
keychord_fd_init = 1;
}
然后调用poll等待监听事情的发生,如果有来自上面监听的事件,则处理事件,否则,返回for循环,做下一个action
nr = poll(ufds, fd_count, timeout);
if (nr <= 0)
continue;
for (i = 0; i < fd_count; i++) {
if (ufds[i].revents == POLLIN) {
if (ufds[i].fd == get_property_set_fd())
handle_property_set_fd();
else if (ufds[i].fd == get_keychord_fd())
handle_keychord();
else if (ufds[i].fd == get_signal_fd())
handle_signal();
}
}
由上面的分析可以知道,其实e到f的步骤都只是按照一定的执行顺序把init.rc里的action加到action_queue里,然后在for循环里一边执行一边监听3类事件,等所有action完成后,继续一直停留在for循环里监听3类事件。各个section的工作顺序可以从这里看得出来。跟2.3不一样的地方是,2.3是先做完early-init action, 再做property_init, 再加载开机第一画面,再做init action,然后启动属性服务器,然后建立sockpair对, 然后执行early-boot 和 boot action,再打开3类监听器,然后进入for循环,执行其他aciton, 并监听3类事件。在4.0里,开机画面加载(load_565rle_image(INIT_IMAGE_FILE))放在console_init_action里,然后所有的action都放在for循环中执行。
2.1 解析配置文件
init的main函数里调用init_parse_config_file来处理init.rc或和硬件平台相关的init.**.rc, init_parse_config()主要调用了parse_config()来分析,如下:
static void parse_config(const char *fn, char *s)
{
struct parse_state state;
char *args[INIT_PARSER_MAXARGS];
int nargs;
nargs = 0;
state.filename = fn;
state.line = 0;
state.ptr = s;
state.nexttoken = 0;
state.parse_line = parse_line_no_op;
for (;;) {
switch (next_token(&state)) {
case T_EOF:
state.parse_line(&state, 0, 0);
return;
case T_NEWLINE:
state.line++;
if (nargs) {
int kw = lookup_keyword(args[0]);
if (kw_is(kw, SECTION)) {
state.parse_line(&state, 0, 0);
parse_new_section(&state, kw, nargs, args);
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;
}
break;
case T_TEXT:
if (nargs < INIT_PARSER_MAXARGS) {
args[nargs++] = state.text;
}
break;
}
}
}
其中的lookupkeyword在下面的2.1.1会详细讲到。找到keyword后,如果不是section属性,则调用parse_new_line(), 调用parse_new_section(), parse_new_section()分析了关键字 on, service, import三个属性的section,如下:
void parse_new_section(struct parse_state *state, int kw,
int nargs, char **args)
{
printf("[ %s %s ]\n", args[0],
nargs > 1 ? args[1] : "");
switch(kw) {
case K_service:
state->context = parse_service(state, nargs, args);
if (state->context) {
state->parse_line = parse_line_service;
return;
}
break;
case K_on:
state->context = parse_action(state, nargs, args);
if (state->context) {
state->parse_line = parse_line_action;
return;
}
break;
case K_import:
if (nargs != 2) {
ERROR("single argument needed for import\n");
} else {
int ret = init_parse_config_file(args[1]);
if (ret)
ERROR("could not import file %s\n", args[1]);
}
}
state->parse_line = parse_line_no_op;
}
其中service是系统服务,on是section的起始标志,import是引进别的类似init.rc(这是加入硬件平台的init.rc的另外一种常用方法)。
2.1.1 关键字定义
关键字定义在system/core/init/keywords.h文件里,文件首先定义了action实际执行的函数,部分代码:
int do_class_start(int nargs, char **args);
int do_class_stop(int nargs, char **args);
int do_class_reset(int nargs, char **args);
int do_domainname(int nargs, char **args);
int do_exec(int nargs, char **args);
int do_export(int nargs, char **args);
int do_hostname(int nargs, char **args);
int do_ifup(int nargs, char **args);
int do_insmod(int nargs, char **args);
然后通过##来定义一些keyword枚举,如:
KEYWORD(group, OPTION, 0, 0)
KEYWORD(hostname, COMMAND, 1, do_hostname)
KEYWORD(ifup, COMMAND, 1, do_ifup)
KEYWORD(insmod, COMMAND, 1, do_insmod)
KEYWORD(import, SECTION, 1, 0)
KEYWORD(keycodes, OPTION, 0, 0)
KEYWORD(mkdir, COMMAND, 1, do_mkdir)
KEYWORD(mount, COMMAND, 3, do_mount)
KEYWORD(on, SECTION, 0, 0)
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(restart, COMMAND, 1, do_restart)
KEYWORD(rm, COMMAND, 1, do_rm)
KEYWORD(rmdir, COMMAND, 1, do_rmdir)
KEYWORD(service, SECTION, 0, 0)
KEYWORD(setenv, OPTION, 2, 0)
注意keywords.h里有#ifndef KEYWORD的条件,这个巧妙的应用(如何巧妙可看书),在配合parser.c里的代码:
#define SECTION 0x01
#define COMMAND 0x02
#define OPTION 0x04
#include "keywords.h"
#define KEYWORD(symbol, flags, nargs, func) \
[ K_##symbol ] = { #symbol, func, nargs + 1, flags, },
struct {
const char *name;
int (*func)(int nargs, char **args);
unsigned char nargs;
unsigned char flags;
} keyword_info[KEYWORD_COUNT] = {
[ K_UNKNOWN ] = { "unknown", 0, 0, 0 },
#include "keywords.h"
};
#undef KEYWORD
#define kw_is(kw, type) (keyword_info[kw].flags & (type))
#define kw_name(kw) (keyword_info[kw].name)
#define kw_func(kw) (keyword_info[kw].func)
#define kw_nargs(kw) (keyword_info[kw].nargs)
这样,就形成了一个一个keyword_info结构提数组,里面的内容为[{on, null, 1, SECTION}, {class_start, do_class_start, 2, COMMAND}, {class, null, 1, OPTION}, ......]等。总结起来有两点:
第一次包含keywords.h时,它声明了一些诸如do_class_start的函数,另外还定义了一个枚举,枚举值为K_class,K_mkdir等关键字。第二次包含keywords.h后,得到了keyword_info的结构体数组,以前面的枚举值为索引,存储对应的关键字信息,包括关键字名称,处理函数,处理函数的参数个数,以及属性。
2.3中,只有当symbol为on和service为SECTION,4.0中增加了import也为section,用于添加分析新的init.rc设置。
2.2.2 解析init.rc
粘贴部分init.rc如下:
on early-init
# Set init and its forked children's oom_adj.
write /proc/1/oom_adj -16
start ueventd
# create mountpoints
mkdir /mnt 0775 root system
on init
sysclktz 0
loglevel 3
# setup the global environment
export PATH /sbin:/vendor/bin:/system/sbin:/system/bin:/system/xbin
export LD_LIBRARY_PATH /vendor/lib:/system/lib
export ANDROID_BOOTLOGO 1
export ANDROID_ROOT /system
......
on fs
# mount mtd partitions
# Mount /system rw first to give the filesystem a chance to save a checkpoint
mount yaffs2 mtd@system /system
mount yaffs2 mtd@system /system ro remount
mount yaffs2 mtd@userdata /data nosuid nodev
mount yaffs2 mtd@cache /cache nosuid nodev
on post-fs
# once everything is setup, no need to modify /
mount rootfs rootfs / ro remount
# We chown/chmod /cache again so because mount is run as root +
......
## Daemon processes to be run by init.
##
service ueventd /sbin/ueventd
class core
critical
service console /system/bin/sh
class core
console
disabled
user shell
group log
on property:ro.debuggable=1
start console
# adbd is controlled via property triggers in init.<platform>.usb.rc
service adbd /sbin/adbd
class core
disabled
# adbd on at boot in emulator
on property:ro.kernel.qemu=1
start adbd
如上所分析,on代表一个section,因此一开始就是early-init 和 init 两个 section,后来还有很多section, 例如fs section, post-fs section等,每个on section里有一些command,例如mount,export, start等,service是另外一类section,service后跟这个service的名字,对应的执行文件,以及属性(OPTION)设置。2.2 解析 service
2.2.1 service 结构体
以zygote为例(虽然zygote是虚拟机的始祖,但是如果不是系统的重度开发者,是不会涉及到zygote的修改吧,所以我的关注点并不是zygote本身,而是透过书上的这个例子看一下典型的service的启动过程,当然,zygote的崩溃导致死机或者系统重启的现象和原因,有助于当产线上老化机器出现死机或者系统自动重启问题时候,对问题的debug),看一下service到底是怎么一回事,先看下init.rc里关于zygote的设置:
service zygote /system/bin/app_process -Xzygote /system/bin --zygote --start-system-server
class main
socket zygote stream 666
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
onrestart restart netd
上面里,service是一个section的开始,zygote是service的名字,/system/bin/app_process是zygote对应的可执行文件,后面是执行参数。下面都是OPTION。class main 让service的calssname属性为main, 这是4.0的新特性,2.3中这个属性默认为default,以在do_class_start()中默认启动服务。socket是建立名字为zygote,类型为stream,读写权限是666的socket。onrestart是一个属性,这个属性附加了4个command。parse_new_section()通过parse_service()生成service结构体,查找是否冲突,否则把下图的service结构体加入到链表service_list(), 并且把service的classname属性设置为“default”,以保证在do_class_start中被匹配启动。返回新生成的结构体。然后,通过调用parse_line_service(),读取service的各种属性,生成socket(如果需要),填入service结构体,生成的service机构体如下:
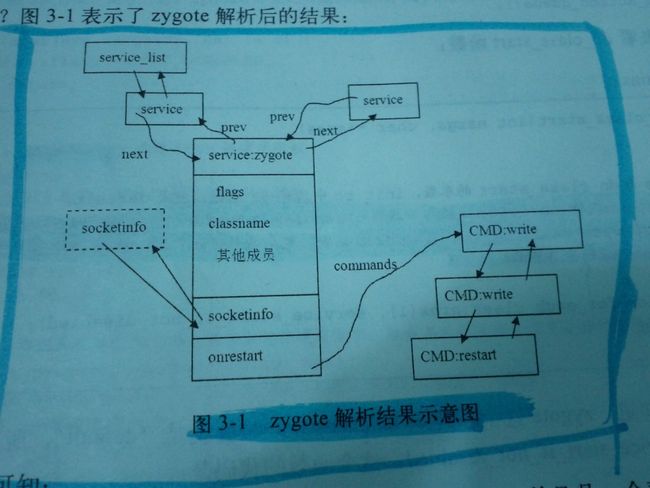
a. servide_list链表将解析后的service全部链接到了一起,并且是一个双向链表,前向节点用prev表示,后向节点用next表示。
b. socketinfo也是一个双向链表,因为zygote只有一个socket,所以画了一个虚框socket作为链表的示范。
c. onrestart通过commands指向一个commands链表, zygote有4个commands, 图中按照2.3来只画了3个。
2.3 init控制service
上面讲了init.rc的service是如何匹配到service结构体,下面讲一下parse_new_section()后,init是怎么启动service的。
2.3.1 启动 zygote
init.rc中有COMMAND class_start的时候,会执行do_class_start的函数,2.3中class_start 只会有一个default参数,会把所有classname为default的service启动(通常是放在boot section), 4.0中class_start加了core, main, charger, late_start这4个类型。do_class_start()中调用service_start_if_not_disabled(), 再调用service_start(),用fork() + execve()来创建子进程并执行service指定的可执行文件来终于启动了service。这个过程会根据一些service的属性,例如SVC_DISABLED等来决定是否进行启动service。
2.3.2 重启 zygote
在signal_init()(函数在core/init/signal_handle.c,通过queue_builtin_action(signal_init_action, "signal_init");加入到init的action_list中)函数中,通过socketpair()把signal_fd和signal_recv_fd配对。当子进程退出时,会执行sigchld_handle()函数,往signal_fd写数据,而signal_init()调用的handle_signal()函数通过读取signal_recv_fd,调用wait_for_one_process(),这个函数通过Pid找到对应的service,然后根据SVC_ONESHOT, SVC_RESET, SVC_DISABLED等的值,来决定如何处理。需要关注的是,如果设置了SVC_ONESHOT,那么会调用kill(-pid, SIGKELL)把所有该Pid创建的所有子进程都杀死,zygote就是设置了这个属性。如果设置了SVC_CRITICAL,那么4分钟内该服务的次数不能超过4次,否则机器会在重启时进入recovery模式。像servicemanager就有这个设置。如果SVC_RESTARTING,那么属性onrestart的command就会执行。
2.4 属性服务
property service, 属性服务,类似于windows的注册表属性机制,通过getprop可以查看当前属性。property主要设计到property_init()和property_set_fd = start_property_service()两个函数。
2.4.1 属性服务初始化
void property_init(bool load_defaults)
{
init_property_area();
if (load_defaults)
load_properties_from_file(PROP_PATH_RAMDISK_DEFAULT);
}
如上,在init_property_area()里面,通过ashmem_create_region() (init_workspace()函数调用) 创建大小为PA_SIZE(32768)的共享内存,然后把__system_property_area__指向这块共享内存,因为:
a.把属性区域创建在共享内存上,而共享内存是可以跨进程的。
b. 为了让其他进程知道这个共享内存,Android利用了gcc的constructor属性, 这个属性指明了一个__libc_prenit函数(void __attribute__((constructor)) __libc_prenit(void)),当bionic libc库被加载时,将自动调用这个__libc_prenit,这个函数内部就将完成共享内存到本地进程的映射工作。
c. constructor属性指示加载器加载该库后,首先调用__libc_prenit函数,和Windows上的动态库的DllMain函数类似。__libc_prenit()调用__libc_init_common()再调用__system_properties_init(),用mmap把ANDROID_PROPERTY_WORKSPACE对应的内存以只读的形式映射到本地。
2.4.2 属性服务器的分析
start_property_service()加载 /default.prop, /system/build.prop, /system/default.prop, /data/local.prop。对于保存在永久介质上的属性文件,在/data/property目录下,并且这些文件的文件名必须以persist.开头。当属性服务器收到客户端请求时,init会调用handle_property_set_fd进行处理。客户端则通过property_set(由libcutils库提供)来向服务器发送设置属性的请求。
3.小结
这一章详细分析了init.rc中的各项关键字,了解了SECTION,COMMAND,OPTION的意思,还有service是怎样启动的,对于增减驱动或者修改一些系统属性时修改init.rc是个启发性的阅读。另外,这一章会设计到一些socket编程的概念。