Harris算子的运用 用于图像配准
Harris算子介绍:
该算子是C.Harris和M.J.Stephens在1988年提出的一种点特征提取算子。这种算子受信号处理中自相关函数的启发,可以给出图像中某一像素点的自相关矩阵肘,其特征值是自相关函数的一阶曲率,如果算,Y两个方向上的曲率值都高,那么就认为该点是角点。Harris角点检测算子
Harris[2]角点检测算子是Moravec角点检测算子的改进.
(1)算子用高斯函数代替二值窗口函数,对离中心点越近的像素赋于越大的权重,以减少噪声影响。
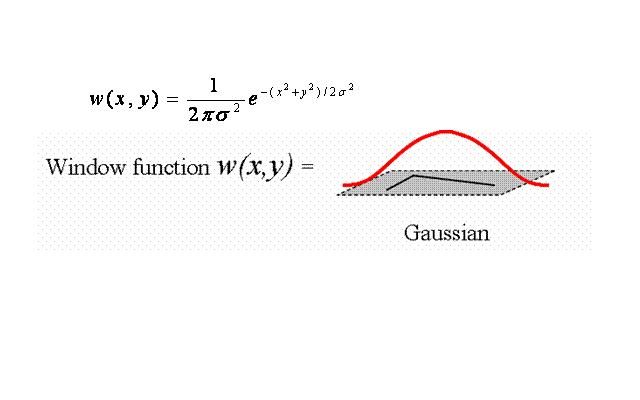
图1-3高斯函数
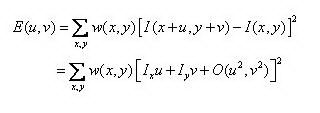
(2)算子只考虑了每隔45度方向,Harris算子用Taylor展开去近似任意方向。
写成矩阵形式: :
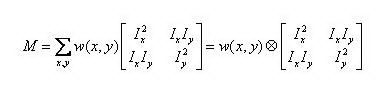
式子(1-2)
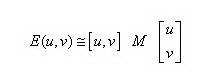
式子(1-3)
式中,Ix为x方向的差分,Iy为y方向的差分,w(x,y)为高斯函数。
(3)Harris采用了一种新的角点判定方法。矩阵M的两个特征向量l1和l2与矩阵M的主曲率成正比。Harris利用l1, l2来表征变化最快和最慢的两个方向.若两个都很大就是角点,一个大一个小就是边缘,两个都小就是在变化缓慢的图像区域.
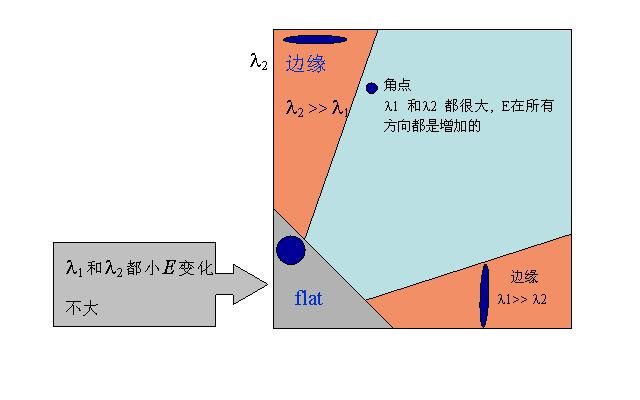
来自文献[11]
图1- 4用矩阵M的特征向量分类图像像素点
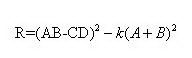
但是解特征向量需要比较多的计算量,且两个特征值的和等于矩阵M的迹,两个特征值的积等于矩阵M的行列式。所以用(1-4)式来判定角点质量。(k常取0.04-0.06)
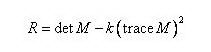 (1-4)
(1-4)
(4) Harris算法总结
Step 1:对每一像素点计算相关矩阵M。

Step 2:计算每像素点的Harris 角点响应。
Step 3.在w*w范围内寻找极大值点,若Harris 角点响应大于阀值,则视为角点。
Harris算子对灰度的平移是不变的,因为只有差分,对旋转也有不变性,但是对尺度很敏感,在一个尺度下是角点, 在在另一个尺度下可能就不是了.
图1- 5 harris算子对尺度的敏感性
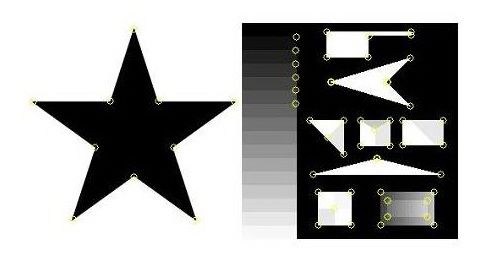
图1- 6 harris算子对简单图像的响应
Harris 算子是一种有效的点特征提取算子,其优点总结起来有:
①计算简单:Harris 算子中只用到灰度的一阶差分以及滤波,操作简单。
②提取的点特征均匀而且合理:Harris 算子对图像中的每个点都计算其兴趣值,然后在邻域中选择最优点。实验表明,在纹理信息丰富的区域,Harris 算子可以提取出大量有用的特征点,而在纹理信息少的区域,提取的特征点则较少。
③稳定:Harris算子的计算公式中只涉及到一阶导数,因此对图像旋转、灰度变化、噪声影响和视点变换不敏感,它也是比较稳定的一种点特征提取算子。
Harris 算子的局限性有:
①它对尺度很敏感,不具有尺度不变性。
②提取的角点是像素级的。
代码:
<span style="font-size:18px;">im=imread('lena.jpg');
tau=100;
im=double(im);
keyXs=[];
keyYs=[];
win=3;
[height,width] = size(im);
result = zeros(height,width);
%Then I will get the gradients of the image along the x and y axises.
sobel_x=1/4*[-1 0 1;-2 0 2;-1 0 1];
sobel_y=1/4*[-1 0 1;-2 0 2;-1 0 1]';
diffx=imfilter(im,sobel_x); %对图像x方向进行梯度
diffy=imfilter(im,sobel_y); %对图像y方向的梯度进行计算
%For smoothing the differentiation of the image along the x and y
%direction, the gauss filter of the diffx and diffy is must.
gauss_win=win;
sigma=1;
[x,y]=meshgrid(-gauss_win:gauss_win,-gauss_win:gauss_win);
gauss2D=exp(-(x.^2+y.^2)/(2*sigma.^2)); %产生高斯算子
gauss2D=gauss2D/(sum(sum(gauss2D))); %对高斯算子进行归一化
%Then calculate the M matrix.
A=imfilter(diffx.*diffx,gauss2D); %二阶x方向梯度进行高斯滤波
B=imfilter(diffy.*diffy,gauss2D); %二阶y方向梯度进行高斯滤波
C=imfilter(diffx.*diffy,gauss2D); %对图像x y方向的梯度进行高斯滤波
%Harris mehtods.
if(strcmp(tau,'Harris'))
k=0.2;
threshold=200;
%Harris criteria.
Harris=A.*B-C.^2-k*(A+B).^2;
%Then I will do the non-maximum supression.
supress_win=2;
points_count=0;
%%对图像的每个像素进行阈值判断是否是角点
for x=supress_win+1:width-supress_win
for y=supress_win+1:height-supress_win
%Then you need to judge if the pixel has the biggest Harris
%response in the (2*supress_win+1)*(2*supress_win+1) neighbour.
temp=Harris(y,x); %得到图像x y位置的harri值
if(temp>threshold) %该点的haari值大于周围像素的阈值时
flag=0;
for i=-supress_win:supress_win
for j=-supress_win:supress_win
if(temp>=Harris(y+j,x+i))
flag=flag+1; %像素的个数加1
end
end
end
if(flag==((2*supress_win+1)*(2*supress_win+1)))
result(y,x)=1;
points_count=points_count+1;
keyXs(points_count)=x;
keyYs(points_count)=y; %存储haari角点的坐标
end
end
end
end</span>
另一种代码:
<span style="font-size:18px;">%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Harris角点提取算法 %
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear;
%filename='487_r.png';
%X= imread('Circle.bmp'); % 读取图像
X= imread('001.jpg'); % 读取图像
%imshow(X);
%Info=imfinfo(filename);
% if Info.BitDepth>8
% f=rgb2gray(X);
f=X;
%end
%
% fx = [5 0 -5;8 0 -8;5 0 -5]; % 高斯函数一阶微分,x方向(用于改进的Harris角点提取算法)
ori_im=double(f)/255; %unit8转化为64为双精度double64
fx = [-2 -1 0 1 2]; % x方向梯度算子(用于Harris角点提取算法)
Ix = filter2(fx,ori_im); % x方向滤波
% fy = [5 8 5;0 0 0;-5 -8 -5]; % 高斯函数一阶微分,y方向(用于改进的Harris角点提取算法)
fy = [-2;-1;0;1;2]; % y方向梯度算子(用于Harris角点提取算法)
Iy = filter2(fy,ori_im); % y方向滤波
Ix2 = Ix.^2;
Iy2 = Iy.^2;
Ixy = Ix.*Iy;
clear Ix;
clear Iy;
h= fspecial('gaussian',[7 7],2); % 产生7*7的高斯窗函数,sigma=2
Ix2 = filter2(h,Ix2);
Iy2 = filter2(h,Iy2);
Ixy = filter2(h,Ixy);
height = size(ori_im,1);
width = size(ori_im,2);
result = zeros(height,width); % 纪录角点位置,角点处值为1
R = zeros(height,width);
Rmax = 0; % 图像中最大的R值
for i = 1:height
for j = 1:width
M = [Ix2(i,j) Ixy(i,j);Ixy(i,j) Iy2(i,j)]; % auto correlation matrix
R(i,j) = det(M)-0.06*(trace(M))^2; % 计算R
if R(i,j) > Rmax
Rmax = R(i,j);
end;
end;
end;
cnt = 0;
for i = 2:height-1
for j = 2:width-1
% 进行非极大抑制,窗口大小3*3
if R(i,j) > 0.01*Rmax && R(i,j) > R(i-1,j-1) && R(i,j) > R(i-1,j) && R(i,j) > R(i-1,j+1) && R(i,j) > R(i,j-1) && R(i,j) > R(i,j+1) && R(i,j) > R(i+1,j-1) && R(i,j) > R(i+1,j) && R(i,j) > R(i+1,j+1)
result(i,j) = 1;
cnt = cnt+1;
end;
end;
end;
i=1;
for j=1:height
for k=1:width
if result(j,k)==1;
corners1(i,1)=j;
corners1(i,2)=k;
i=i+1;
end;
end;
end;
[posc, posr] = find(result == 1);
cnt % 角点个数
imshow(ori_im)
hold on;
plot(posr,posc,'r+');
a=ginput(1);
b=ginput(1);
j=1;
for i=1:cnt
if corners1(i,1)>a(1,2) && corners1(i,1)<b(1,2)
if corners1(i,2)>a(1,1) && corners1(i,2)<b(1,1)
B(j,1)=corners1(i,1);
B(j,2)=corners1(i,2);
j=j+1;
end
end
end
xlswrite('C:\Documents and Settings\ipsuser\桌面\Harris\ceshidata.xls',B,'Sheet1','C1');</span>