ROS-----actionlib应用实战(by goal-result-feedback callback)
1 创建workspace
首先创建名为actionlib_ws的workspace。然后执行如下命令创建package。
catkin_create_pkg my_actionlib actionlib message_generation roscpp rospy std_msgs actionlib_msgs
2 创建Action Specification
在package目录(my_actionlib)下创建Averaging.action文件,内容包括goal定义, result定义和feedback定义,它们之间用符号(---)隔离。 Averaging.action文件看上去与.srv文件非常相似。message将基于该action文件自动生成。
#goal definition int32 samples --- #result definition float32 mean float32 std_dev --- #feedback int32 sample float32 data float32 mean float32 std_dev
如果要手动基于该action文件创建message,请执行如下命令:
$ roscd learning_actionlib $ rosrun actionlib_msgs genaction.py -o msg/ action/Averaging.action
如果要在编译时自动生成message,请在CmakeLists.txt文件中添加如下:
find_package(catkin REQUIRED COMPONENTS actionlib std_msgs message_generation) add_action_files(DIRECTORY action FILES Averaging.action) generate_messages(DEPENDENCIES std_msgs actionlib_msgs)
3 实现一个node产生数据
#!/usr/bin/env python
import rospy
from std_msgs.msg import Float32
import random
def gen_number():
pub = rospy.Publisher('random_number', Float32)
rospy.init_node('random_number_generator', log_level=rospy.INFO)
rospy.loginfo("Generating random numbers")
while not rospy.is_shutdown():
pub.publish(Float32(random.normalvariate(5, 1)))
rospy.sleep(0.05)
if __name__ == '__main__':
try:
gen_number()
except Exception, e:
print "done"
Server订阅该node发布的topic,然后进行处理。
4 实现server端code
#include <ros/ros.h>
#include <std_msgs/Float32.h>
#include <actionlib/server/simple_action_server.h> <span style="color:#3366FF;">//实现简单action需要的action库</span>
#include <my_actionlib/AveragingAction.h> <span style="color:#3366FF;">//这里是基于Averaging.action自动生成的action message,它基于<span class="http">AveragingAction.msg自动</span>创建
</span>
class AveragingAction
{
public:
<span style="color:#3366FF;">//构造函数中创建action server,action server参数包括node handle,action name,optionally executeCB function(这里没有使用)</span>
AveragingAction(std::string name) :
as_(nh_, name, false),
action_name_(name)
{
<span style="color:#3366FF;">//register the goal and feeback callbacks</span>
as_.registerGoalCallback(boost::bind(&AveragingAction::goalCB, this));
as_.registerPreemptCallback(boost::bind(&AveragingAction::preemptCB, this));
<span style="color:#3366FF;">//subscribe to the data topic of interest</span>
sub_ = nh_.subscribe("/random_number", 1, &AveragingAction::analysisCB, this);
as_.start();
}
~AveragingAction(void)
{
}
void goalCB()
{
<span style="color:#3366FF;">// reset helper variables</span>
data_count_ = 0;
sum_ = 0;
sum_sq_ = 0;
<span style="color:#3366FF;">// accept the new goal</span>
goal_ = as_.acceptNewGoal()->samples;
}
void preemptCB()
{
ROS_INFO("%s: Preempted", action_name_.c_str());
<span style="color:#3366FF;">// set the action state to preempted</span>
as_.setPreempted();
}
void analysisCB(const std_msgs::Float32::ConstPtr& msg)
{
<span style="color:#3366FF;">//make sure that the action hasn't been canceled</span>
if (!as_.isActive())
return;
data_count_++;
feedback_.sample = data_count_;
feedback_.data = msg->data;
<span style="color:#3366FF;">//compute the std_dev and mean of the data </span>
sum_ += msg->data;
feedback_.mean = sum_ / data_count_;
sum_sq_ += pow(msg->data, 2);
feedback_.std_dev = sqrt(fabs((sum_sq_/data_count_) - pow(feedback_.mean, 2)));
as_.publishFeedback(feedback_);
if(data_count_ > goal_)
{
result_.mean = feedback_.mean;
result_.std_dev = feedback_.std_dev;
if(result_.mean < 5.0)
{
ROS_INFO("%s: Aborted", action_name_.c_str());
<span style="color:#3366FF;">//set the action state to aborted</span>
as_.setAborted(result_);
}
else
{
ROS_INFO("%s: Succeeded", action_name_.c_str());
<span style="color:#3366FF;">// set the action state to succeeded</span>
as_.setSucceeded(result_);
}
}
}
protected:
ros::NodeHandle nh_;
actionlib::SimpleActionServer<my_actionlib::AveragingAction> as_;
std::string action_name_;
int data_count_, goal_;
float sum_, sum_sq_;
my_actionlib::AveragingFeedback feedback_;
my_actionlib::AveragingResult result_;
ros::Subscriber sub_;
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "averaging");
AveragingAction averaging(ros::this_node::getName());
ros::spin();
return 0;
}
5 实现client端
#include <ros/ros.h>
#include <actionlib/client/simple_action_client.h>
#include <actionlib/client/terminal_state.h>
#include <my_actionlib/AveragingAction.h>
#include <boost/thread.hpp>
typedef actionlib::SimpleActionClient<my_actionlib::AveragingAction> Client;
void spinThread()
{
ros::spin();
}
class MyActionClient{
public:
MyActionClient(const std::string client_name, bool flag) : ac(client_name, flag)
{
}
void start()
{
ROS_INFO("Waiting for action server to start.");
ac.waitForServer();
ROS_INFO("Action server started, sending goal.");
// send a goal to the action
my_actionlib::AveragingGoal goal;
goal.samples = 100;
ac.sendGoal(goal);
// Need boost::bind to pass in the 'this' pointer
ac.sendGoal(goal,
boost::bind(&MyActionClient::doneCb, this, _1, _2),
Client::SimpleActiveCallback(),
Client::SimpleFeedbackCallback());
//wait for the action to return
bool finished_before_timeout = ac.waitForResult(ros::Duration(30.0));
if (finished_before_timeout)
{
actionlib::SimpleClientGoalState state = ac.getState();
ROS_INFO("Action finished: %s",state.toString().c_str());
}
else
ROS_INFO("Action did not finish before the time out.");
}
void doneCb(const actionlib::SimpleClientGoalState& state,
const my_actionlib::AveragingResultConstPtr& result)
{
ROS_INFO("Finished in state [%s]", state.toString().c_str());
ROS_INFO("Result mean: %f", result->mean);
ROS_INFO("Result std_dev: %f", result->std_dev);
}
private:
Client ac;
};
int main (int argc, char **argv)
{
ros::init(argc, argv, "test_averaging");
// create the action client,should be ture otherwise not work
MyActionClient myac("averaging", true);
//start client
myac.start();
// shutdown the node and join the thread back before exiting
ros::shutdown();
//exit
return 0;
}
6 客制化自动创建的CMakeList.txt
cmake_minimum_required(VERSION 2.8.3)
project(my_actionlib)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
<span style="color:#3366FF;">find_package(catkin REQUIRED COMPONENTS
actionlib
actionlib_msgs
message_generation
roscpp
rospy
std_msgs
)</span>
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a run_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a run_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
<span style="color:#3366FF;">add_action_files(
DIRECTORY action
FILES Averaging.action
)</span>
## Generate added messages and services with any dependencies listed here
<span style="color:#3366FF;">generate_messages(
DEPENDENCIES
actionlib_msgs std_msgs
)</span>
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a run_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if you package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES my_actionlib
# CATKIN_DEPENDS actionlib actionlib_msgs message_generation roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
# include_directories(include)
include_directories(
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(my_actionlib
# src/${PROJECT_NAME}/my_actionlib.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(my_actionlib ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
<span style="color:#3366FF;">add_executable(averaging_server src/averaging_server.cpp)
add_executable(averaging_client src/averaging_client.cpp)</span>
## Add cmake target dependencies of the executable
## same as for the library above
<span style="color:#3366FF;">add_dependencies(averaging_server ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(averaging_client ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})</span>
## Specify libraries to link a library or executable target against
<span style="color:#3366FF;">target_link_libraries(
averaging_server
${catkin_LIBRARIES}
)
target_link_libraries(
averaging_client
${catkin_LIBRARIES}
)</span>
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# install(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables and/or libraries for installation
# install(TARGETS my_actionlib my_actionlib_node
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_my_actionlib.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
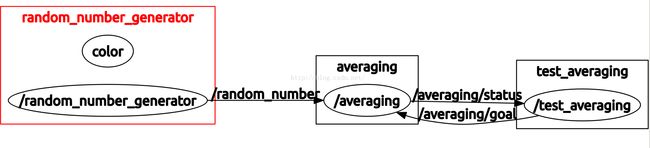
7 rqt_graph如下所示
注意:以上代码部分基于参考ROS Wiki并做了定制化。