Python神经网络编程学习笔记(一)
一、预测器(千米转换英里)
若简单机器接受了一个输入,并做出应有的预测,输出结果,所以我们将其称为预测器。我们根据结果与已知真实示例进行比较所得到的误差,调整内部参数,使预测更加精确。预测器的核心是有一个可调节的线性函数。
已知千米和英里之间存在线性关系:英里=千米×C,随机取C的值,目标为减少误差。

无需使用确切的方法计算出C值,采用持续细化误差的想法。我们尝试得到一个答案,并多次改进答案,这种方法也可称为迭代,意思是持续地、一点一点改进答案。
总结:
1.当我们不能精确知道一些事情如何运作时,我们可以尝试使用模型来估计其运作方式,在模型中,包括了我们可以调整的参数。如果我们不知道如何将千米转换为英里,那么我们可以使用线性函数作为模型,并使用可调节的梯度值作为参数。
2.改进这些模型的一种好方法是,基于模型和已知真实示例之间的比较,得到模型偏移的误差值,调整参数。
个人思考:预测器本身并不是为了得到精确的结果,而是通过比较,调整内部参数,从而尽可能减少输出结果的误差。所以没有必要纠结于使用公式算出精确结果。
二、分类器(毛虫和瓢虫为例)
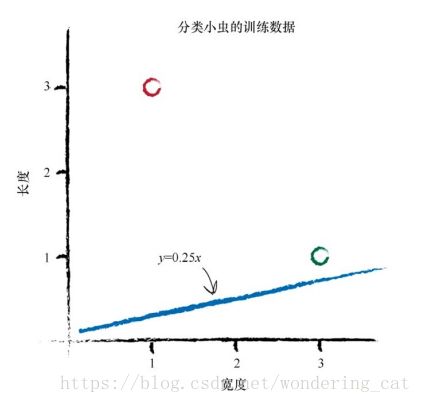
使用直线将不同性质的事物分开,即训练线性分类器,调整分界线的斜率,使其能够正确分类瓢虫或毛虫。
实例:

设置线性函数:y=Ax y为长度,x为宽度,A为斜率参数。
不能通过观察图就画出一条合适的直线,我们希望能够找到一种可重复的方法,也就是用一系列的计算机指令来达到这个目标。计算机科学家称这一系列指令为算法
1.数字计算过程:
(1)随机为A取值,测试期望值与真实值。
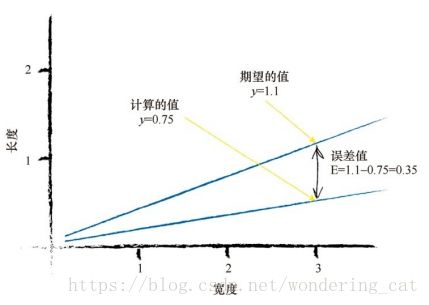
随机取A=0.25,测试实例1,得y=0.75
设期望的目标值是1.1,误差值E为 误差值=(期望目标值-实际输出值), E = 1.1-0.75 = 0.35
(2)寻找误差值E与A的关系
设正确的期望值为t,即目标值。
显然得 E = t - y
y=Ax ①
t = (A + ΔA)x ② ΔA表示微小的斜率变化量
由①②可得 t -y = (A + ΔA)x - Ax 即 E=ΔAx
使用数据测试该公式的正确性:
使用(1)中的误差值E=0.35,x=3.0,A=0.25
由E=ΔAx,得ΔA=0.1167,更新后的A=0.1167+0.25=0.3667
用更新后的A,得到 y=Ax=0.3667*3=1.1
与(1)中设置的目标值相符!
(3)基于当前的误差值调整参数
使用更新后的A测试实例2,x=1.0时,y=Ax=0.3667*1.0=0.3667 与y=3.0相差甚远
设置目标值为2.9,则误差值E=2.9-0.3667=2.5333 误差变得更大了!
ΔA=2.5333,A=2.5333+0.3667=2.9
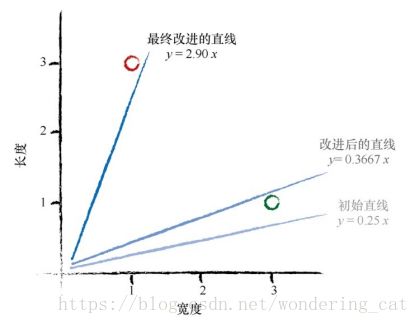
结论:我们最终改进的直线与最后一次训练样本十分匹配,但是抛弃了先前训练样本的学习结果,只对最近的一个实例进行了学习。
2.适度改进,采用学习率方法
添加一个调节系数L,ΔA= L(E / x ),调节系数通常也被称为学习率。
设置L=0.5,即只更新原更新值的一半。
(1)实例1测试
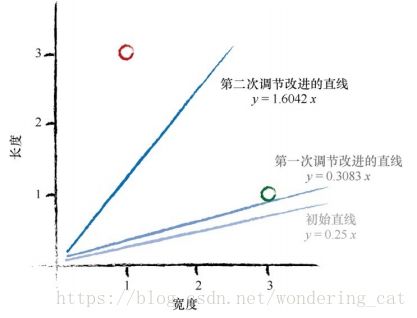
初始值A=0.25,E=0.35,x=3.0,ΔA= L(E / x )=0.5*0.35/3.0=0.0583
A=0.0583+0.25=0.3083
y=Ax=0.3083*3.0=0.9250 与未调整前相比,向正确方向移动了。
(2)基于(1)的实例2测试
使用A=0.3083,x=1.0,y=0.3083*1.0=0.3083
所需值为2.9,误差值E=2.9-0.3083=2.5917
ΔA= L(E / x )=0.5*2.5917/1.0=1.2958
第二个更新值A=0.3083+1.2958=1.6042
总结:
使用一般的调整方法会出现一个问题,即改进后的模型只与最后一次训练样本最匹 配,“有效地”忽略了所有以前的训练样本。解决这个问题的一种好方法是使用学习率,调节改进速率,这样单一的训练样本就不能主导整个学习过程.
个人思考:
前两次的分类器存在共同的问题:即只能对最近的一次记录进行学习,忽略了其他数据。我们采取的改进办法是增加调节系数,即利用带有学习率的改进方法。