机器人控制器编程课程-教案02-基础
经过第一次课程,需要理解为何学习这门课?!
- 是教学大纲要求不得不学?
- 还是的确有趣并实用,必须要学?
那么如何学习一门技术,包括机器人控制器编程技术???
现在技术更新速度十分快,如何学习最新并使用最广的相关技术呢???
- 要点:跨平台,或者称之为多平台支持
 arduino
arduino
Arduino软件支持windows、Mac OS X和Linux,凡是主流并广泛使用的工具都是全平台支持的。
如ROS2、Webots和V-Rep都是全平台支持的,也是本课程学有余力的同学推荐安装并学习的(还有Matlab^_^)。
 ROS 2
ROS 2
 Webots
Webots
 V-Rep
V-Rep
还有其他特点吗????
- 要点:多语言支持,如支持至少3种以上语言(C++、Python、Java)进行程序编写
同样以Arduino,通过合适的配置不仅可以实现仿真,还支持Python、Matlab等编程。
所有IoT(物联网)硬件都是多平台多语言支持的!!!
Arduino微控制器和SoC世界无处不在的“Hello World”程序是“闪烁LED”。以下代码演示了如何使用Johnny-Five框架完成此操作。
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
// Create an Led on pin 13
var led = new five.Led(13);
// Blink every half second
led.blink(500);
}); Arduino(JavaScript Robotics和IoT编程框架)
Arduino(JavaScript Robotics和IoT编程框架)
第2章,25-73页,分别介绍了Arduino语言结构、扩展模块等。
基础包括软件和硬件。
顺序结构(灯闪烁):
 Blink
Blink
void setup() {
pinMode(13, 1);
}
void loop() {
digitalWrite(13, 1);
delay(1000);
digitalWrite(13, 0);
delay(1000);
} 选择结构(判断字符):
int val;//定义变量val
int ledpin=13;//定义数字接口13
void setup()
{
Serial.begin(9600);//设置波特率为9600,这里要跟软件设置相一致。当接入特定设备(如:蓝牙)时,我们也要跟其他设备的波特率达到一致。
pinMode(ledpin,OUTPUT);//设置数字13 口为输出接口,Arduino 上我们用到的I/O 口都要进行类似这样的定义。
}
void loop()
{
val=Serial.read();//读取PC 机发送给Arduino 的指令或字符,并将该指令或字符赋给val
if(val=='X')//判断接收到的指令或字符是否是“X”。
{//如果接收到的是“X”字符
digitalWrite(ledpin,HIGH);//点亮数字13 口LED。
delay(500);
digitalWrite(ledpin,LOW);//熄灭数字13 口LED
delay(500);
Serial.println("Hello World!");//显示“Hello World!”字符串
}
else
{
Serial.println("No XXXX");
}
}循环结构(跑马灯):
 for 1
for 1
 for 2
for 2
int BASE = 2 ; //第一顆 LED 接的 I/O 腳
int NUM = 6; //LED 的總數
void setup()
{
for (int i = BASE; i < BASE + NUM; i ++)
{
pinMode(i, OUTPUT); //設定數字I/O腳為輸出
}
}
void loop()
{
for (int i = BASE; i < BASE + NUM; i ++)
{
digitalWrite(i, 1); //設定數字I/O腳輸出為"低",即逐漸關燈
delay(200); //延遲
}
for (int i = BASE; i < BASE + NUM; i ++)
{
digitalWrite(i, 0); //設定數字I/O腳輸出為"低",即逐漸開燈
delay(200); //延遲
}
}从PWM到呼吸灯:
 亮
亮
 暗
暗
int led = 9; // the PWM pin the LED is attached to
int brightness = 0; // how bright the LED is
int fadeAmount = 5; // how many points to fade the LED by
// the setup routine runs once when you press reset:
void setup() {
// declare pin 9 to be an output:
pinMode(led, OUTPUT);
}
// the loop routine runs over and over again forever:
void loop() {
// set the brightness of pin 9:
analogWrite(led, brightness);
// change the brightness for next time through the loop:
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness <= 0 || brightness >= 255) {
fadeAmount = -fadeAmount;
}
// wait for 30 milliseconds to see the dimming effect
delay(30);
}模拟量输入控制LED灯闪烁时间:
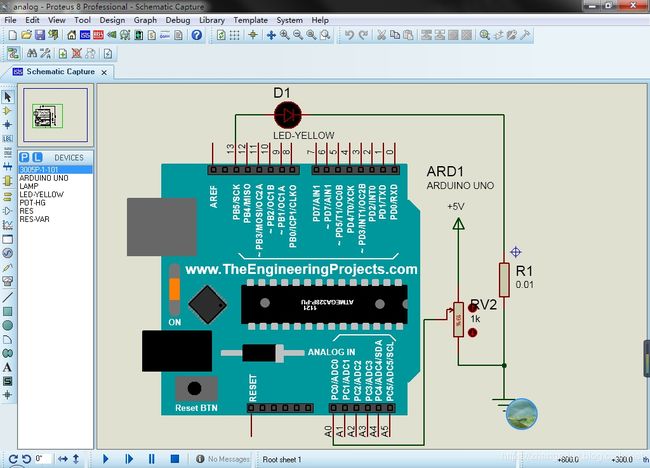 analog
analog
int sensorPin = A0; // select the input pin for the potentiometer
int ledPin = 13; // select the pin for the LED
int sensorValue = 0; // variable to store the value coming from the sensor
void setup() {
// declare the ledPin as an OUTPUT:
pinMode(ledPin, OUTPUT);
}
void loop() {
// read the value from the sensor:
sensorValue = analogRead(sensorPin);
// turn the ledPin on
digitalWrite(ledPin, HIGH);
// stop the program for milliseconds:
delay(sensorValue);
// turn the ledPin off:
digitalWrite(ledPin, LOW);
// stop the program for for milliseconds:
delay(sensorValue);
}