图像质量评估指标 SSIM / PSNR / MSE
图像质量评估指标 SSIM / PSNR / MSE
Visibility of Errors
计算图像degrade后的质量,最 direct 的思路即比较degrade后的图像与真实图像(distortion-free)之间的差剖面,即可视误差,通过 visibility of errors 评价图像质量。
PSNR 和 MSE 就是基于这种简单直接的思路确定的指标,MSE(Mean Squared Error),顾名思义,定义略。PSNR(Peak Signal to Noise Ratio),峰值信噪比,即峰值信号的能量与噪声的平均能量之比,通常表示的时候取 log 变成分贝(dB),由于 MSE 为真实图像与含噪图像之差的能量均值,而两者的差即为噪声,因此 PSNR 即峰值信号能量与 MSE 之比。定义式如下:
P S N R = 10 l o g 10 M a x V a l u e 2 M S E = 10 l o g 10 2 b i t s − 1 M S E PSNR = 10log_{10}\frac{Max Value^2}{MSE} = 10log_{10}\frac{2^{bits} - 1}{MSE} PSNR=10log10MSEMaxValue2=10log10MSE2bits−1
第二个等式由于图像像素点数值以量化方式保存,bits 即每个像素点存储所占的位数。因此 MaxValue 即为 2^bits - 1。
-
计算PSNR
def cal_psnr(im1, im2): mse = (np.abs(im1 - im2) ** 2).mean() psnr = 10 * np.log10(255 * 255 / mse) return psnr
由于 grayscale 存成 8bit ,故最大值255。
Structural Similarity
由于基于差剖面的简单计算不符合人类视觉系统(Human Visual System,HVS)的评价结果,因此需要对评价方式进行重新考量。如果图片的最终目的是对人类展示的话,那么质量应该以人的主管测评为准。但是由于主管评价不方便且费时,因此我们试图用客观的 image quality assessment 来对图像进行评价,使其接近 HVS 的特点。由于 HVS 具有可以抓取图像的结构特征的特点,因此设计 Structural Similarity 进行评价,即 SSIM 。
图像质量评价分为:
- full-reference:知道noise-free的图像。
- no-reference:真实图像无法取得,因此需要blind assessment。
- reduced-reference:reference只是部分的available。只有extracted features作为附加信息,进行评估。
这里讨论的是full-reference。
在介绍SSIM之前,由于MSE的缺点,人们尝试过对MSE进行改进,使得errors are penalized in accordance with their visibility。即 error sensitivity,基于误差敏感度。基本流程如下:
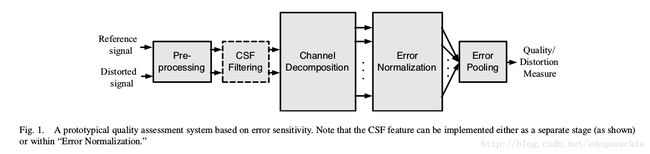
预处理比如,将色彩空间转换到更适合HVS的空间,将储存的像素值转换为显示出的亮度值,等等。CSF为 Contrast Sensitivity Function,该函数描述了HVS对于不同时空频带的刺激的敏感性。然后分成不同channel,或称为subband,根据方向,时空频率等等。再分别计算误差并normalize,然后combine。
然而上述方法有很多缺陷,因此考虑新的思路,从自然图像高度结构化的特征出发,设计新的assessment。
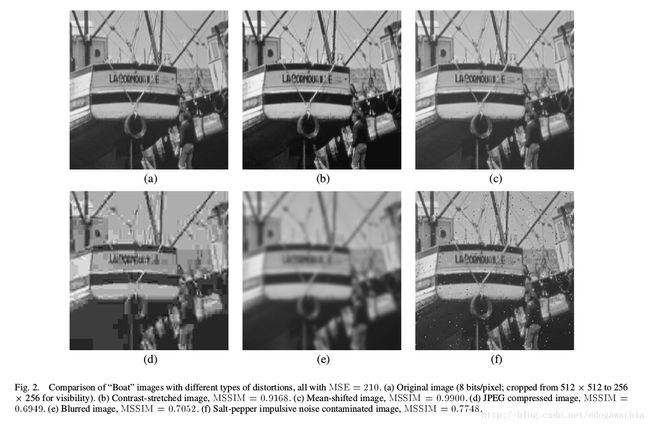
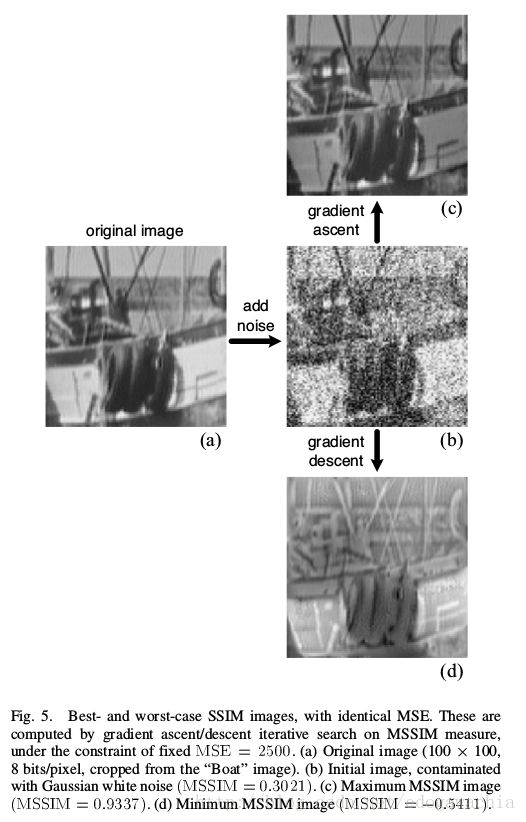
相比于之前估计 perceived errors,该思路估计 perceived changes in structural information variation。如下图所示,虽然这些图的MSE相同,即具有相同的PSNR水平,但是显然对于人的主管感觉来说差别时很大的,对于contrast的stretch,以及均值的偏移,即整体上明暗变化,基本上并不会影响人类对图像的内容的理解。因此应该让这样的图片得到的质量值更高。原因在于我们可以把original information近乎完全的恢复出来,只需要做pixel-wise的映射即可。(当然saturation的那些数值无法恢复),而像比如blur,JPEG compression等,许多结构信息已经永久丢失了,因此应该评分低些。从图可以看出,SSIM做的较好。
然后SSIM的基本思路是,通过一下三个方面来对两幅图像的相似性进行评估,即
1. luminance,亮度
2. contrast,对比度
3. structure,结构
算法的框图基本如下:
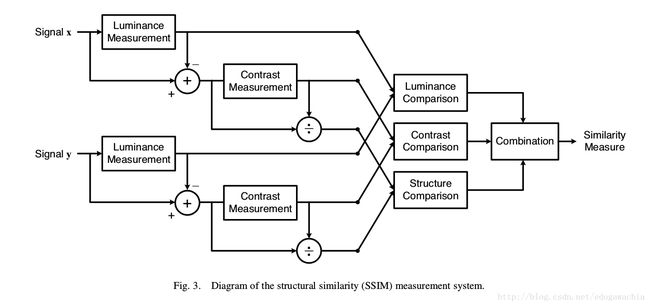
基本流程为:对于输入的x和y,首先计算出luminance measurement,进行比对,得到第一个相似性有关的评价;在减去luminance的影响,计算contrast measurement,比对,得到第二个评价;在用上一步的结果除掉contrast,在进行structure的比对。最后将结果combine,得到最终的评价结果。
从实现角度来讲,亮度用均值表征,对比度用经过均值归一化之后的方差表征,结构用相关系数(就是统计意义上的 r ,协方差与方差乘积的比值)。
具体的计算公式如下所示:



其中S表示相似度,这个算子应当满足作为度量的基本性质,即
- Symmetry,交换x和y顺序不影响结果。
- Boundedness,值要有界,这里时小于等于1.。
- Unique maximum,最大值,即1,只有当 x = y 时候取到。
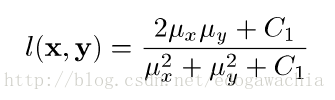
上面的公式里,比如 l(x,y) ,这样定义的一个原因是让上下次数相同,然后可以满足Weber’s law,Weber定理说的是,对于HVS,对于亮度变化的最小感知的幅度与背景亮度成正比,也就是说,我们的视觉系统时对于相对的亮度变化敏感,而不是绝对值,比如我们的 μ _ 1 \mu\_1 μ_1和 μ _ 2 \mu\_2 μ_2如果是成比例的话,假设比例系数为(1+R),带入计算,发现$ l(x,y) $ 仅仅与R有关,与两均值的绝对数值无关,说明我们的评价比较类似人眼的视觉的主观性质。然后后面的C_1常数项是为了当均值接近0的时候避免波动。对比度相似度的定义类似,然后结构相似性用的是correlation coefficient,也加了常数项防止除0。最后将三项加权乘积,一般选 α = β = γ = 1 \alpha = \beta = \gamma = 1 α=β=γ=1 使得表达式简单。于是总公式就是:

但是由于SSIM应该应用于局部,这既是因为图像distortion的程度可能空变,也是为了拟合人类视觉的局部性的特点,因此实际上我们用 mean-SSIM或者MSSIM,对各个local window的SSIM求平均。一般用高斯加权函数对每个local statistics进行加权防止出现blocking。
关于用SSIM测试的实验结果,作者首先做了一个很有趣的实验,即best/worst case的实验,通过对一个corrupted图像在保持MSE不变的情况下,对SSIM这个参数进行向上和向下的优化,找到了同等PSNR下的SSIM 最好和最差的情况。这样可以看出SSIM到底是表征了什么信息。
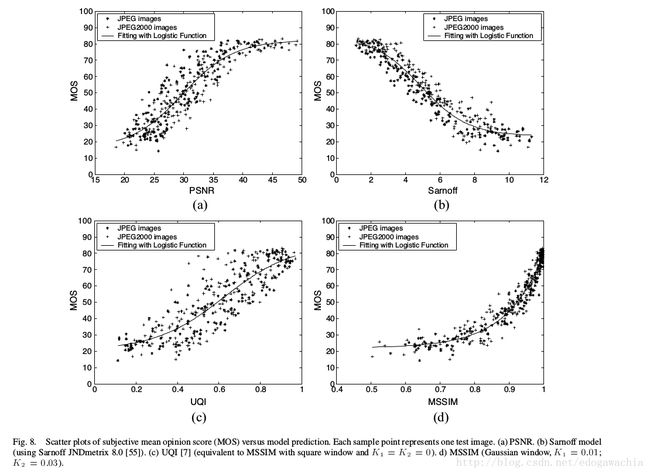
最后是和MOS (mean opinion score)的相关性。可以看出MSSIM效果更好一些,由于分布比较紧致。
-
计算SSIM
def cal_ssim(im1,im2): assert len(im1.shape) == 2 and len(im2.shape) == 2 assert im1.shape == im2.shape mu1 = im1.mean() mu2 = im2.mean() sigma1 = np.sqrt(((im1 - mu1) ** 2).mean()) sigma2 = np.sqrt(((im2 - mu2) ** 2).mean()) sigma12 = ((im1 - mu1) * (im2 - mu2)).mean() k1, k2, L = 0.01, 0.03, 255 C1 = (k1*L) ** 2 C2 = (k2*L) ** 2 C3 = C2/2 l12 = (2*mu1*mu2 + C1)/(mu1 ** 2 + mu2 ** 2 + C1) c12 = (2*sigma1*sigma2 + C2)/(sigma1 ** 2 + sigma2 ** 2 + C2) s12 = (sigma12 + C3)/(sigma1*sigma2 + C3) ssim = l12 * c12 * s12 return ssim
THE END
星期六, 09. 十二月 2017 12:24上午
reference:
Wang Z, Bovik A C, Sheikh H R, et al. Image quality assessment: from error visibility to structural similarity[J]. IEEE transactions on image processing, 2004, 13(4): 600-612.