pytorch学习笔记(线性模型)
线性模型
问题介绍
线性模型,通俗来讲就是给定很多个数据点,希望能够找到一个函数来拟合这些数据点令它的误差最小,比如简单的一元函数就可以来表示给出一系列的点,找一条直线,使得直线尽可能与这些点接近,也就是这些点到直线的距离之和尽可能小。用数学语言来严格表达 ,即 给定由 d 个属性描述的示例 x = (x1,x2 ,x3 , ...,xd) ' 其中 Xi 表示X在第i个属性上面的取值, 线性模型就是试图学习 一个通过属性的线性组合来进行预测的函数,即一元线性模型非常简单,每个$i$对应于一个数据点,希望建立一个模型 ![]() ,其中 ,y一般可以用向量来表达:
,其中 ,y一般可以用向量来表达:
![]()
w=(w1,w2,...,wd)和b都是要学习的参数,模型通过不断地调整w和b,最后就能得到一个最优的模型.
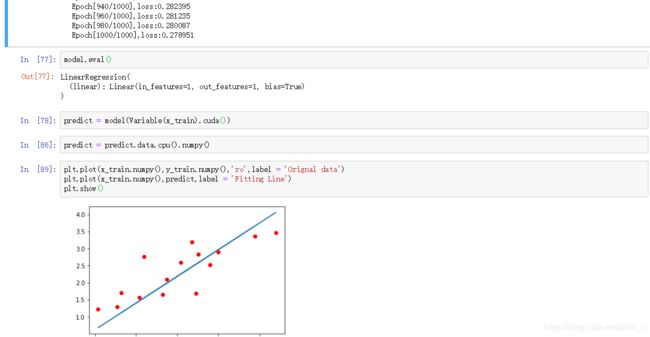
一维线性回归
给定数据集![]() ,线性回归希望能够优化出一个好的函数
,线性回归希望能够优化出一个好的函数![]() ,使得
,使得![]() 能够和
能够和![]() 尽可能接近。
尽可能接近。
如何才能学习到参数w和b呢?很简单,只需要确定如何衡量与之间的差别,一般通过损失函数(Loss Funciton)来衡量:

取平方是因为距离有正有负,我们希望将它们变为全是正的。这就是著名的均方误差。基于均方误差最小化来进行模型求解的办法也称为"最小二乘法",我们要做的事情就是希望能够找到和,使得:


均方差误差非常直观,也有着很好的几何意义,对应了常用的欧式距离。现在要求解这个连续函数的最小值,我们很自然想到的方法就是求它的偏导数,让它的偏导数等于0来估计它的参数,即:


求解以上两式,我们就可以得到w和b的最优解:
![]()
其中


多维线性回归
有d个属性,试图求得最优化的函数f(x):
![]()
使得
最小,这称为"多元线性回归",同样可以用最小二乘法对w和b进行估计,为了方便计算,可以将w和d写进同一个矩阵,将数据集D表示成一个mx(d+1)的矩阵X,每行前面d个元素表示d个属性,最后一个元素设为1,将目标y也写成写成向量形式:y=(y1;y2;...;ym),然后就可以得到
![]()
对其求导,令它等于0.
![]()
若![]() 是一个满秩矩阵或者正定矩阵,那么我们可以得到:
是一个满秩矩阵或者正定矩阵,那么我们可以得到:
![]()
所以线性回归模型可以写成: ![]()
但是在现实中,![]() 往往不是满秩,即使是,求解逆的过程也比较慢,所以我们一般使用梯度下降的方法去求解这个最小二乘法的问题.
往往不是满秩,即使是,求解逆的过程也比较慢,所以我们一般使用梯度下降的方法去求解这个最小二乘法的问题.
多项式回归
对于一般的线性回归,由于函数拟合出来的是一条直线,所以精度欠佳,我们考虑多项回归.提高每个属性的次数,而不是使用一次去回归目标函数.
拟合我们想要拟合的方程:
![]()
然后可以设置参数方程:
![]()
首先将数据变成一个矩阵的形式

接下来用pytorch来实现:
import torch
import numpy as np
import torch.nn as nn
import torch.optim as optim
from torch.autograd import Variable
import random
import matplotlib.pyplot as plt
def make_features(x):
# 将矩阵扩展成多维式子
'''BUild features i.e. a matrix with columns[x,x^2,x^3].'''
x = x.unsqueeze(1) # unsqueeze(1) 是将原来的tensor大小由3变成(3,1)
return torch.cat([x ** i for i in range(1, 4)], 1)
# 定义好真实的函数
w_target = torch.FloatTensor([0.5,3,2.4]).unsqueeze(1)
b_target = torch.FloatTensor([0.9])
def f(x):
"""Approximated function."""
return x.mm(w_target)+b_target[0]
def get_batch(batch_size=32, random = None):
"""BUilds a batch i.e (x,f(x)) pair."""
if random is None:
random = torch.randn (batch_size)
batch_size = random.size ()[0]
# random = torch.randn(batch_size)
# 返回一个张量,包含了从正态分布(均值为0,方差为 1,即高斯白噪声)中抽取一组随机数。 Tensor的形状由变量sizes定义
x = make_features(random)
y = f(x)
if torch.cuda.is_available():
return Variable(x).cuda(),Variable(y).cuda()
else:
return Variable(x),Variable(y)
# 通过上面的这个函数我们每次取batch_size这么多个数据点,然
# 后将其转成矩阵的形式,再通过这个值通过函数之后的结果也返回作为真实的坐标
# 然后定义多项式模型
# Define model
class poly_model(nn.Module):
def __init__(self):
super(poly_model, self).__init__()
self.poly = nn.Linear(3, 1)
def forward(self,x):
out = self.poly(x)
return out
if torch.cuda.is_available():
model = poly_model().cuda()
else:
model = poly_model()
# 这里的模型输入时3维,输出是1维
# 这里定义损失函数和优化器
criterion = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=1e-3)
# 开始训练模型
epoch = 0
while True:
# Get data
batch_x, batch_y = get_batch ()
# forward pass
output = model(batch_x)
loss = criterion(output,batch_y)
print_loss = loss.item()
# reset gradients
optimizer.zero_grad()
# backward pass
loss.backward()
# update parameters
optimizer.step()
epoch +=1
if print_loss <1e-3:
break
# 定义函数输出形式
def func_format(weight, bias, n):
func = ''
for i in range(n, 0, -1):
func += ' {:.2f} * x^{} +'.format(weight[i - 1], i)
return 'y =' + func + ' {:.2f}'.format(bias[0])
predict_weight = model.poly.weight.data.cpu().numpy().flatten() # 因为使用了GPU所以要Use Tensor.cpu() to copy the tensor
predict_bias = model.poly.bias.data.cpu().numpy().flatten()
print('predicted function :', func_format(predict_weight, predict_bias,3))
real_W = w_target.numpy().flatten()
real_b = b_target.numpy().flatten()
print('real function :', func_format(real_W, real_b,3))
x = [random.randint(-200, 200) * 0.01 for i in range(20)]
x = np.array(sorted(x))
feature_x, y = get_batch(random=torch.from_numpy(x).float())
print(feature_x.size())
y = y.data.cpu().numpy()
plt.plot(x, y, 'ro', label='Original data')
model.eval()
x_sample = np.arange(-2, 2, 0.001)
x, y = get_batch(random=torch.from_numpy(x_sample).float())
print(x.size())
y = model(x)
y_sample = y.data.cpu().numpy()
plt.plot(x_sample, y_sample, label = 'Fitting Line')
plt.show()predicted function : y = 2.41 * x^3 + 2.98 * x^2 + 0.48 * x^1 + 0.95
real function : y = 2.40 * x^3 + 3.00 * x^2 + 0.50 * x^1 + 0.90
torch.Size([20, 3])
torch.Size([4000, 3])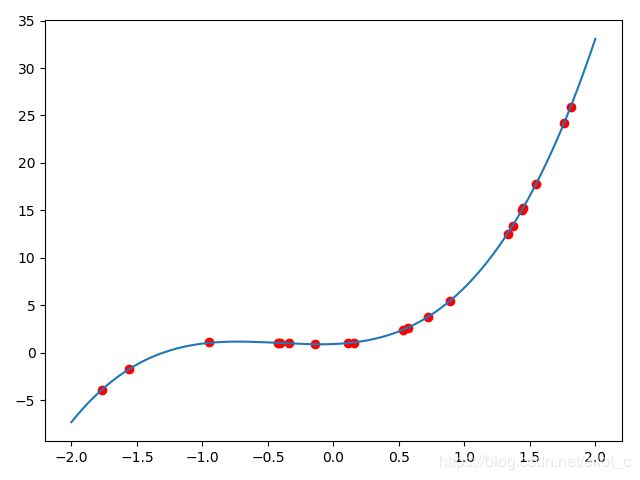
参考: 深度学习入门之PyTorch(廖星宇)
https://www.jianshu.com/p/dda6846e8354