【STM32】STM32之霍尔传感器模块
本篇博文最后修改时间:2017年03月06日,23:50。
一、简介
本文介绍如何在STM32上使用霍尔传感器模块。
二、实验平台
库版本:STM32F10x_StdPeriph_Lib_V3.5.0
编译软件:MDK4.53
硬件平台:STM32开发板(主芯片stm32f103c8t6)
仿真器:JLINK
三、版权声明
博主:甜甜的大香瓜
声明:喝水不忘挖井人,转载请注明出处。
原文地址:http://blog.csdn.NET/feilusia
联系方式:[email protected]
香瓜BLE之CC2541群:127442605
香瓜BLE之CC2640群:557278427
香瓜BLE之Android群:541462902
暂无
五、基础知识
1、霍尔传感器是什么?
答:霍尔传感器是根据霍尔效应制作的一种磁场传感器。
用磁铁去靠近霍尔传感器时,霍尔传感器的引脚电平会产生变化。
2、霍尔传感器主要用在什么地方?
答:霍尔传感器可测速、计数、限位上。
举例限位功能:两个霍尔传感器形成45°的夹角,电机边缘粘着一个磁铁,一旦电机转动导致磁铁触发任意其中一个霍尔传感器,则STM32检测到触发后立刻停止电机,不能再继续往此方向转动。以此达到限制电机转动角度的作用。
3、本文使用的是什么霍尔传感器模块?
答:

香瓜买的霍尔传感器模块一共有四个引脚,GND、VCC、D0、A0。
其中只需要用到三根线,GND、VCC、D0。(A0不知做啥用的,计数?)
使用方法:
1)5V供电。
2)用跳线连接D0和STM32的IO口(本文连接的是PA11)。
3)D0默认是高电平,但磁铁的特定一面(磁铁另一面无用)去靠近霍尔传感器模块时,D0会被拉低。
4、霍尔传感器与限位开关有什么区别?
答:
1)限位开关
①优点:无功耗。
②缺点:易损坏。
2)霍尔传感器
①优点:不易损坏。
②缺点:有功耗。
六、实验步骤
1、编写并添加霍尔传感器驱动
1)编写驱动GUA_Hall_Sensor.c(存放在“……\HARDWARE”)
//******************************************************************************
//name: GUA_Hall_Sensor.c
//introduce: 霍尔传感器驱动
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.03.06
//******************************************************************************
#include "stm32f10x.h"
#include "GUA_Hall_Sensor.h"
/*********************宏定义************************/
//霍尔传感器引脚
#define GUA_HALL_SENSOR_PORT GPIOA
#define GUA_HALL_SENSOR_PIN GPIO_Pin_11
//消抖总次数
#define GUA_HALL_SENSOR_DISAPPERAS_SHAKS_COUNT 500000
/*********************内部变量************************/
static GUA_U32 sGUA_Hall_Sensor_DisapperasShakes_IdleCount = 0; //消抖时的空闲状态计数值
static GUA_U32 sGUA_Hall_Sensor_DisapperasShakes_TriggerCount = 0; //消抖时的触发状态计数值
/*********************内部函数************************/
static void GUA_Hall_Sensor_IO_Init(void);
//******************************************************************************
//name: GUA_Hall_Sensor_IO_Init
//introduce: 霍尔传感器的IO初始化
//parameter: none
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.03.06
//******************************************************************************
static void GUA_Hall_Sensor_IO_Init(void)
{
//IO结构体
GPIO_InitTypeDef GPIO_InitStructure;
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//霍尔IO配置
GPIO_InitStructure.GPIO_Pin = GUA_HALL_SENSOR_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GUA_HALL_SENSOR_PORT, &GPIO_InitStructure);
}
//******************************************************************************
//name: GUA_Hall_Sensor_Check_Pin
//introduce: 霍尔传感器检测触发状态
//parameter: none
//return: GUA_HALL_SENSOR_STATUS_IDLE or GUA_HALL_SENSOR_STATUS_TRIGGER
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.03.06
//******************************************************************************
GUA_U8 GUA_Hall_Sensor_Check_Pin(void)
{
//没触发
if(GPIO_ReadInputDataBit(GUA_HALL_SENSOR_PORT, GUA_HALL_SENSOR_PIN) == SET)
{
//计数
sGUA_Hall_Sensor_DisapperasShakes_IdleCount++;
sGUA_Hall_Sensor_DisapperasShakes_TriggerCount = 0;
//判断计数是否足够
if(sGUA_Hall_Sensor_DisapperasShakes_IdleCount >= GUA_HALL_SENSOR_DISAPPERAS_SHAKS_COUNT)
{
return GUA_HALL_SENSOR_STATUS_IDLE;
}
}
//触发
else
{
//计数
sGUA_Hall_Sensor_DisapperasShakes_IdleCount = 0;
sGUA_Hall_Sensor_DisapperasShakes_TriggerCount++;
//判断计数是否足够
if(sGUA_Hall_Sensor_DisapperasShakes_TriggerCount >= GUA_HALL_SENSOR_DISAPPERAS_SHAKS_COUNT)
{
return GUA_HALL_SENSOR_STATUS_TRIGGER;
}
}
return GUA_HALL_SENSOR_STATUS_DISAPPERAS_SHAKS;
}
//******************************************************************************
//name: GUA_Limit_Switch_Init
//introduce: 霍尔传感器初始化
//parameter: none
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.03.06
//******************************************************************************
void GUA_Hall_Sensor_Init(void)
{
//初始化IO
GUA_Hall_Sensor_IO_Init();
}
//******************************************************************************
//name: GUA_Hall_Sensor.h
//introduce: 霍尔传感器驱动的头文件
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.03.06
//******************************************************************************
#ifndef _GUA_HALL_SENSOR_H_
#define _GUA_HALL_SENSOR_H_
/*********************宏定义************************/
//类型宏
#ifndef GUA_U8
typedef unsigned char GUA_U8;
#endif
#ifndef GUA_8
typedef signed char GUA_8;
#endif
#ifndef GUA_U16
typedef unsigned short GUA_U16;
#endif
#ifndef GUA_16
typedef signed short GUA_16;
#endif
#ifndef GUA_U32
typedef unsigned long GUA_U32;
#endif
#ifndef GUA_32
typedef signed long GUA_32;
#endif
#ifndef GUA_U64
typedef unsigned long long GUA_U64;
#endif
#ifndef GUA_64
typedef signed long long GUA_64;
#endif
//霍尔传感器的触发状态
#define GUA_HALL_SENSOR_STATUS_TRIGGER 0 //霍尔传感器触发
#define GUA_HALL_SENSOR_STATUS_IDLE 1 //霍尔传感器没触发
#define GUA_HALL_SENSOR_STATUS_DISAPPERAS_SHAKS 2 //霍尔传感器消抖中
/*********************外部函数声明************************/
GUA_U8 GUA_Hall_Sensor_Check_Pin(void);
void GUA_Hall_Sensor_Init(void);
#endif

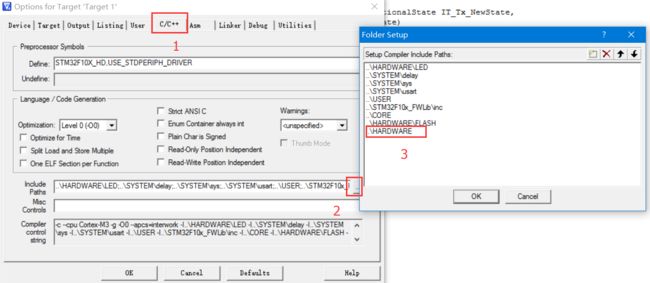
4)在MDK设置中添加串口驱动源文件路径
2、在应用层中调用
1)添加驱动头文件(main.c中)
#include "GUA_Hall_Sensor.h"2) 添加驱动初始化代码(main.c的main函数中)
//霍尔传感器初始化
GUA_Hall_Sensor_Init(); 3) 添加测试代码
①写测试代码(main.c中)
static void GUA_Test(void)
{
U8 nGUA_Ret = 0;
U8 nGUA_Stop = 0;
while(1)
{
//检测霍尔当前状态
nGUA_Ret = GUA_Hall_Sensor_Check_Pin();
//检测到霍尔被触发
if(nGUA_Ret == GUA_HALL_SENSOR_STATUS_TRIGGER)
{
nGUA_Stop = 1;
}
}②调用测试代码 ( main.c的main函数中 )
//测试代码
GUA_Test();暂无。
八、实验结果
仿真并设置断点在测试代码的“nGUA_Stop = 1;”中,全速运行。
用磁铁去靠近模块上的霍尔传感器芯片,模块上的led被点亮表示触发,同时工程中消抖之后会停止在断点处,表示检测到PA11处的霍尔传感器触发导致的低电平。如下图

因此实验成功。