**图结构练习——最短路径**
图结构练习——最短路径
Time Limit: 1000 ms Memory Limit: 65536 KiB
Problem Description
给定一个带权无向图,求节点1到节点n的最短路径。
Input
输入包含多组数据,格式如下。
第一行包括两个整数n m,代表节点个数和边的个数。(n<=100)
剩下m行每行3个正整数a b c,代表节点a和节点b之间有一条边,权值为c。
Output
每组输出占一行,仅输出从1到n的最短路径权值。(保证最短路径存在)
Sample Input
3 2
1 2 1
1 3 1
1 0
Sample Output
1
0
Hint
Source
赵利强
查看原代码 请点击 小銍2016年06月09日 13:29:09
代码一:
Floyd算法
#include 代码二:
Bellman_Ford算法(1)
#include 查看原文请点击 bellman-ford详解(转载)
Dijkstra算法是处理单源最短路径的有效算法,但它局限于边的权值非负的情况,若图中出现权值为负的边,Dijkstra算法就会失效,求出的最短路径就可能是错的。这时候,就需要使用其他的算法来求解最短路径,Bellman-Ford算法就是其中最常用的一个。该算法由美国数学家理查德•贝尔曼(Richard Bellman, 动态规划的提出者)和小莱斯特•福特(Lester Ford)发明。Bellman-Ford算法的流程如下:
给定图G(V, E)(其中V、E分别为图G的顶点集与边集),源点s,
数组Distant[i]记录从源点s到顶点i的路径长度,初始化数组Distant[n]为, Distant[s]为0;
以下操作循环执行至多n-1次,n为顶点数:
对于每一条边e(u, v),如果Distant[u] + w(u, v) < Distant[v],则另Distant[v] = Distant[u]+w(u, v)。w(u, v)为边e(u,v)的权值;
若上述操作没有对Distant进行更新,说明最短路径已经查找完毕,或者部分点不可达,跳出循环。否则执行下次循环;
为了检测图中是否存在负环路,即权值之和小于0的环路。对于每一条边e(u, v),如果存在Distant[u] + w(u, v) < Distant[v]的边,则图中存在负环路,即是说改图无法求出单源最短路径。否则数组Distant[n]中记录的就是源点s到各顶点的最短路径长度。
可知,Bellman-Ford算法寻找单源最短路径的时间复杂度为O(V*E).
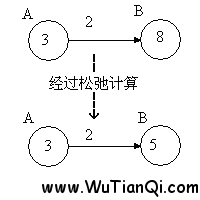
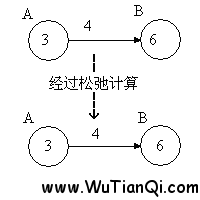
首先介绍一下松弛计算。如下图:
Bellman-Ford算法可以大致分为三个部分
第一,初始化所有点。每一个点保存一个值,表示从原点到达这个点的距离,将原点的值设为0,其它的点的值设为无穷大(表示不可达)。
第二,进行循环,循环下标为从1到n-1(n等于图中点的个数)。在循环内部,遍历所有的边,进行松弛计算。
第三,遍历途中所有的边(edge(u,v)),判断是否存在这样情况:
d(v) > d (u) + w(u,v)
则返回false,表示途中存在从源点可达的权为负的回路。
之所以需要第三部分的原因,是因为,如果存在从源点可达的权为负的回路。则 应为无法收敛而导致不能求出最短路径。
代码二:
Bellman_Ford算法(2)下面代码为博主乱改hhh
#include