【图像特征】【OPENCV】SIFT,SURF,ORB,Harris,FAST,量化匹配度
图像特征
本章主要介绍一些特征点的理论及opencv如何调用,如有疏漏望不吝赐教,对你如果有帮助,不胜荣幸。xue.2018.4.9
注: Opencv出现的特征点检测原理可以从如下链接了解
1、OpencvTutorial>>feature2d module.2D Features framework
2、OpencvTutorial>>OpenCV-Python Tutorial>>Feature Detection and Description
目录:
- 图像特征
- 1.0 SIFT(Scale-invariant feature transform)
- 1.1 参考文献
- 1.2 尺度空间和多分辨率
- 1.3 Scale-space Extrema Detection
- 1.4Keypoint Localization(精确化)
- 1.5 Orientation Assignment(方向赋值)
- 1.6 Keypoint Descriptor特征点描述
- 1.7Keypoint Matching
- 1.8 OPencv源码
- 2.0 Harris
- 3.0 Fast
- 3.1 原理:
- 3.2 机器学习一个角点探测器Machine Learning a Corner Detector
- 3.3 非极大值抑制Non-maximal Suppression
- 3.4 OPencv源码
- 4.0 ORB(留坑待填)
- 5.0 SURF(留坑代填)
- 6.0 量化匹配度
- 6.1 量化思路
- 6.2 代码:
- 1.0 SIFT(Scale-invariant feature transform)
环境:
Win10.x64
VS2015
Opencv3.4
注: Opencv-contrib搭建参考连接
1.0 SIFT(Scale-invariant feature transform)
尺度缩放,旋转,亮度变化具有不变性
应用范围:物体识别,机器人地图感知与导航,影像缝合,3D模型建立,手势识别,影像追踪和动作对比。
1.1 参考文献
原理参考:
1,SIFT算法详解
2,SIFT特征提取分析
3. SIFT原理与源码分析:DoG尺度空间构造
4.Introduction to SIFT (Scale-Invariant Feature Transform)
5.sift
1.2 尺度空间和多分辨率
尺度空间:
1,考虑图像在多尺度下的描述,获取感兴趣物体的最佳尺度。
2,如果在多尺度下都可以检测出相同关键点,即具有尺度不变性。
3,图像的尺度空间表达->就是图像在所有尺度下的描述。
尺度空间表达 采用高斯核
1,高斯核实唯一可以产生多尺度空间的核。
2,高斯卷积只是表现尺度空间的一种形式。
金字塔多分辨率
图像金字塔一般包含两个步骤:
1,低通滤波器平滑图像
2,对平滑图像进行降采样。
尺度空间表达是由不同高斯核平滑卷积得到,在所有尺度上有相同的分辨率
金字塔多分辨率表达每层分辨率减少固定比率
1.3 Scale-space Extrema Detection
Log(Laplace of Gaussian) pyramid 代价高,SIFT采用了高斯差分(Difference of Gaussian)近似LOG。

注: 每个octave含有相同分辨率,不同高斯核 σ σ 和 kσ k σ 。
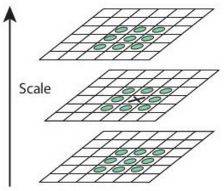
注: 建立DOG后,一个像素(上图中黑X),同其周围8个像素点,和上下不同尺度9个像素点作对比,如果是局部极值,则说是当前尺度空间的特征点

不同的高斯尺度组
根据经验建议:octaves =4,number of scale levels =5, σ=1.6 σ = 1.6 , k=(√2) k = ( 2 )
1.4Keypoint Localization(精确化)
 1,移除弱极值点:当获取特征点后,需要对其进行提炼以获得更精确的结果(上述的极值点都是在离散空间进行搜索的)。通过泰勒公式对DOG进行展开,滤除极值小于contrastThresholdValue的情况。
原文中contrastThresholdValue =0.04
2,删除边缘效应:DOG对边缘有较强的响应,落在边缘的点也不是稳定的特征点。通过2*2 hessian matrix计算主要轮廓。
其中令 α=λmax α = λ m a x , β=λmin β = λ m i n ;
Tr(H)=Dxx+Dyy=α+β T r ( H ) = D x x + D y y = α + β
Det(H)=DxxDyy−(Dyy)2=αβ D e t ( H ) = D x x D y y − ( D y y ) 2 = α β
令 γ=αβ γ = α β 则有:
Tr(H)2Det(H)=(α+β)2αβ=(γ+1)2γ T r ( H ) 2 D e t ( H ) = ( α + β ) 2 α β = ( γ + 1 ) 2 γ
通过 (γ+1)2γ ( γ + 1 ) 2 γ 比率大于一定值得特征点筛除。
原文中edgeThresholdValue =10
1.5 Orientation Assignment(方向赋值)
关键点一定范围内图像像素对关键点方向产生的贡献。
对这个范围内(半径 r=3∗1.5α r = 3 ∗ 1.5 α )的图像进行 α α 的Gaussian平滑,梯度幅值,角度通过如下公式计算:
m(x,y)=(L(x+1,y)−L(x−1,y))2+(L(x,y+1)−L(x,y−1))2−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−√ m ( x , y ) = ( L ( x + 1 , y ) − L ( x − 1 , y ) ) 2 + ( L ( x , y + 1 ) − L ( x , y − 1 ) ) 2
θ(x,y)=arctan(L(x,y+1)−L(x,y−1)L(x+1,y),L(x−1,y)) θ ( x , y ) = a r c t a n ( L ( x , y + 1 ) − L ( x , y − 1 ) L ( x + 1 , y ) , L ( x − 1 , y ) )
将角度分为8个分量,8个分量重叠加幅值,如下图所示:

峰值:主方向
峰值80%:辅方向,一个监测点可以检测到多个方向。
Lowe论文指出15%的关键点具有多方向
此时的关键点信息有 (x,y,σ,θ) ( x , y , σ , θ )
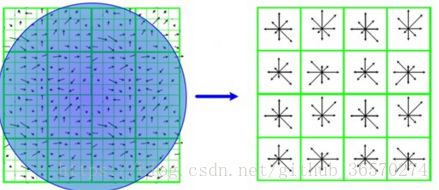
1.6 Keypoint Descriptor特征点描述
Now keypoint descriptor is created. A 16x16 neighbourhood around the keypoint is taken. It is devided into 16 sub-blocks of 4x4 size. For each sub-block, 8 bin orientation histogram is created. So a total of 128 bin values are available. It is represented as a vector to form keypoint descriptor. In addition to this, several measures are taken to achieve robustness against illumination changes, rotation etc.
为了消除光照变化影响,需要做归一化处理。
1.7Keypoint Matching
对比通过两幅图像特征点周围像素点,但有时候匹配点第二优和第一差别不大,此时计算最近距离/第二距离的比率,如果大于0.8,则拒绝。这样可以过滤掉95%的错误匹配,漏掉5%的正确匹配。
1.8 OPencv源码
#include "stdafx.h"
#include
#include sift = xfeatures2d::SIFT::create();
vector 2.0 Harris
原理参考:
[1]OpenCV Tutorials
代码出自OpenCV Tutorials:
Mat src_gray = imread("C:\titleTemp.bmp", IMREAD_GRAYSCALE);
Mat dst, dst_norm, dst_norm_scaled;
dst = Mat::zeros(src_gray.size(), CV_32FC1);
/// Detector parameters
int blockSize = 2;
int apertureSize = 3;
double k = 0.04;
/// Detecting corners
cornerHarris(src_gray, dst, blockSize, apertureSize, k, BORDER_DEFAULT);
/// Normalizing
normalize(dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(dst_norm, dst_norm_scaled);
/// Drawing a circle around corners
for (int j = 0; j < dst_norm.rows; j++)
{
for (int i = 0; i < dst_norm.cols; i++)
{
if ((int)dst_norm.at<float>(j, i) > 128)
{
circle(dst_norm_scaled, Point(i, j), 5, Scalar(0), 2, 8, 0);
}
}
}
/// Showing the result
namedWindow("Harris", CV_WINDOW_AUTOSIZE);
imshow("Harris", dst_norm_scaled);
waitKey();
return 0;3.0 Fast
3.1 原理:
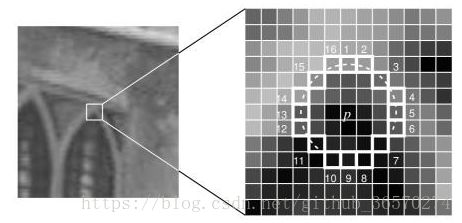
Step1,如上图点p,点p对应的颜色值为I(p),阈值t;在点p半径3内有16个像素点
Step2,如果16个点中有12连续点,其颜色值都I(p)-t,则为角点。
Step3,一种快速的尝试是通过排除一大部分非角点,这里只用到了1,9,5,13(如果1,和9的颜色值同时大于或小于Step2中的阈值,则检查3和5),四个点中有三个满足条件(大于或小于)则为候选角点,对候选角点检测圆上所有的点做测试。上述算法效率较高,但有如下的缺点:
1,快速尝试角点容易跑丢
2,多特征情况下检测到的特征点离得近
3,当n<12不能拒绝过多候选点
4,检测出的角点不是最优的,这是因为它的效率取决于问题的排序与角点的分布
3.2 机器学习一个角点探测器Machine Learning a Corner Detector
Step1, 选取一系列图像,采用fast计算器特征点(feature points)
Step2, 对于每个特征点,保存16个点在一个vector中。获取所有图像的特征点vector P。
Step3, 对于点x,其包围的16个点包含如下三个状态:
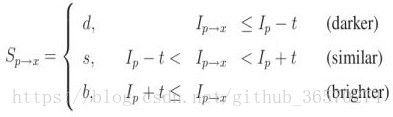
Step4, 则vector P包含三个子集(subsets)Pd,Ps,Pb,定义一个布尔变量(boolean variable)Kp,true为corner。
Step5, 采用决策树ID3,判断vector p
3.3 非极大值抑制Non-maximal Suppression
从相邻多个角点选取最优角点是另一个问题,可以通过极大值抑制解决。
1,定义一个相应函数(score function)V,V是点p同圆上像素点差的绝对值和。
2,比较两个相邻特征点的V值,V值低的将被移除。
3.4 OPencv源码
Mat src0 = imread("C:\\Users\\Xue.Bicycle\\Desktop\\titleTemp.bmp", IMREAD_GRAYSCALE);
Mat src1 = imread("C:\\Users\\Xue.Bicycle\\Desktop\\test1.jpg", IMREAD_GRAYSCALE);
if (src0.data == NULL || src1.data == NULL)
{
cout << "image no exist!" << endl;
return -1;
}
//fast
Ptr fast = FastFeatureDetector::create(0);
vector extractor = xfeatures2d::SiftDescriptorExtractor::create();
Mat descriptor1, descriptor0;
extractor->compute(src0, keypoint0, descriptor0);
extractor->compute(src1, keypoint1, descriptor1);
BFMatcher matcher;
matcher.BRUTEFORCE_SL2;
vector 4.0 ORB(留坑待填)
5.0 SURF(留坑代填)
6.0 量化匹配度
量化背景:通过特征检测,匹配进行图像分类。保存一堆票据,保留其标题,根据标题的匹配度进行分类。如有不当之处,望指教!不胜感激
6.1 量化思路
Step1:采用局部图像ImgTitle匹配整幅图像Img,匹配点的个数往往不能说明问题。通过观察我们知道,如果是匹配图像,则Img,ImgTitle的特征点之间在x,y方向的差值在等分辨率情况下具有一致性。即理想情况下差为0;
Step2:将Img相邻特征点的差值Difx,Dify与ImgTitle相邻特征点归一化在同分辨率情况下。
Step3:计算同分辨率差值Difx,Dify,Img与ImgTiltle的差值(相对分布的简单量化)。
6.2 代码:
//keypointOri,keypoint分别为Img,ImgTitle的特征点。matches为暴力匹配法的结果。(接上述代码)
vector<int> vScore, vScore1, vScoreOri, vScoreOri1;
if (matches.size() <=1)
return -1;
int reNScore = 0;
for (auto itr = matches.begin();itr != matches.end() - matches.size()/2;itr++)
{
Point2f p2f0 = keypointOri[itr->trainIdx].pt;
Point2f p2f1 = keypointOri[(itr+1)->trainIdx].pt;
vScoreOri.push_back(p2f0.x - p2f1.x);
vScoreOri1.push_back(p2f0.y - p2f1.y);
p2f0 = keypoint[itr->queryIdx].pt;
p2f1 = keypoint[(itr + 1)->queryIdx].pt;
vScore.push_back(p2f0.x - p2f1.x);
vScore1.push_back(p2f0.y - p2f1.y);
}
float nScore = 0;
float nScore_ = 0;
for (int idx = 0; idx < std::min((int)10,(int)vScore.size()/10); idx++)
{
nScore += abs(vScore[idx]);
nScore_ += abs(vScoreOri[idx]);
}
float fR;
if (nScore == 0 || nScore_ == 0)
return -1;
else
{
fR = nScore / nScore_;
}
nScore = nScore_ = 0;
for (int idx = 0; idx < vScore.size()/2; idx++)
{
nScore += abs(vScoreOri[idx]*fR - vScore[idx]);
nScore_ += abs(vScoreOri1[idx]*fR - vScore1[idx]);
}
return (nScore*0.8 + nScore_*0.2)/matches.size();