深度强化学习系列之(8): A3C算法原理及Tensorflow实现
在DQN、DDPG算法中均用到了一个非常重要的思想经验回放,而使用经验回放的一个重要原因就是打乱数据之间的相关性,使得强化学习的序列满足独立同分布。
本文首先从Google于ICML2016顶会上发的论文《Asynchronous Methods for Deep Reinforcement Learning》解读开始,点击查看原始论文,里面的其中一大牛作者是David Sliver(看他的课入坑的),先放个论文照片!

从论文title中就可以看出是关于Asynchronous method的内容,而且文章开头摘要中提出了一种轻量级的异步学习框架,这种框架使用了异步梯度下降来最优化神经网络。原文是:“asynchronously execute multiple agents in parallel,” 的意思,在四中不同的算法使用了多个acotr-learner ,最终能够稳定的收敛。另外在Atar、TORCS游戏以及连续性动作空间的Mujoco上均取得不错的效果。这里面最大的功劳在于他们使用了CPU多核属性,也可以说高效率的使用了计算资源。
先说第一个问题:
DQN、DDPG算法使用的experience replay(经验重放),可以说是解决了强化学习满足独立同分布的问题,然而有优点点的背后也是有代价的,就是它使用了更多的资源和每次交互过程的计算,并且他需要一个off-policy学习算法去更新由旧策略产生的数据(experience replay has several drawbacks: it uses more memory and computation per real interaction; and it requires off-policy learning algorithms that can update from data generated by an older policy.)
于是作者就提出了“在多个环境实例上并行地异步执行多个智能体(asynchronously execute multiple agents in parallel, on multiple instances of the environment)”的概念,它的优点在于不像传统方法使用GPU或者大规模的分布式(massively distributed architectures)进行计算,而是运行在一个**“多核CPU单机”上,这为普通玩家(我)带来的更多的福利。让我们更震惊的就是处理同样的任务,异步的A3C**算法(后文讲解)取得了同样甚至超越的效果,而且代价就是训练的时间更短…
至于related work部分不详述,感兴趣的请自行阅读原文。
基于值函数的无模型强化学习中,通常使用神经网络作为一个逼近器来近似值函数
Q ( s , a ) ≈ Q ( s , a , θ ) Q(s,a) \approx Q(s,a,\theta) Q(s,a)≈Q(s,a,θ)
在one-step Q-learning 中,朝着 one-step return 的方向去更新 Q(s, a)。但是利用 one-step 方法的缺陷在于:得到一个奖励 r 仅仅直接影响了得到该奖励的状态动作对 (s, a) 的值(obtain a reward r only directly affects the value of the state action pairs s, a that led to the reward)。其他 state action pairs的值仅仅间接的通过更新 value Q(s, a) 来影响。这就使得学习过程缓慢(耗时的原因啊),因为许多更新都需要传播一个 reward 给相关进行的 states 和 actions。一种快速的传播奖赏的方法是利用 n-step returns。 在 n-step Q-learning 中,Q(s, a) 是朝向 n-step return 进行更新。这样就使得一个奖赏 r 直接地影响了 n 个正在进行的 state action pairs 的值。这也使得给相关 state-action pairs 的奖赏传播更加有效。在 n-step Q-learning 过程中,Q(s, a) 是朝向 n-step return 定义为:
r t + γ r t + 1 + . . . + γ ( n − 1 ) r t + n − 1 + max a γ n Q ( s t + n , a ) r_{t}+\gamma r_{t+1}+...+\gamma^{(n-1)}r_{t+n−1}+\max_{a}\gamma ^{n}Q(s_{t+n},a) rt+γrt+1+...+γ(n−1)rt+n−1+amaxγnQ(st+n,a)
这个结果在一次奖赏 r 直接影响了 n 个后续状态动作对(n proceding state action pairs).这就使得传递奖赏的过程变得非常有效。对比 value-based methods, policy-based model-free methods 直接参数化策略 π ( a ∣ s ; θ ) \pi(a|s;\theta) π(a∣s;θ) 并通过执行 $E[R_{t}] $梯度下降来更新参数。
通常情况标准的强化学习更新策略参数 θ \theta θ的时候通常是在其策略梯度的方向 ∇ θ log π ( a t ∣ s t ; θ ) R t \nabla_{\theta}\log \pi(a_{t}|s_{t};\theta)R_{t} ∇θlogπ(at∣st;θ)Rt,并且 ∇ θ E [ R t ] \nabla_{\theta}E[R_{t}] ∇θE[Rt] 是无偏估计,通过从return减去被称为基线状态 b t ( s t ) b_{t}(s_{t}) bt(st)的学习函数,可以减小该估计的方差,同时保持其无偏。 得到的梯度是 ∇ θ log π ( a t ∣ s t ; θ ) ( R t − b t ) \nabla_{\theta}\log \pi(a_{t}|s_{t};\theta)(R_{t}-b_{t}) ∇θlogπ(at∣st;θ)(Rt−bt)。
第二个问题
此时,我们可以定义一个新的 function A(s, a) ,这个函数称为 优势函数(advantage function):
A ( s t , a t ) = Q ( s t , a t ) − V ( s t ) A(s_{t},a_{t})= Q(s_{t},a_{t})-V(s_{t}) A(st,at)=Q(st,at)−V(st)
注意: 值函数的学习估计通常用作基线 b t ( s t ) ≈ V π ( s t b_{t}(s _{t})≈V_{\pi}(s_{t} bt(st)≈Vπ(st,导致政策梯度的方差估计低得多。当使用近似值函数作为基线时,用于缩放政策梯度的数量 ( R t − b t ) (R_{t}-b_{t}) (Rt−bt)可以被看作是对状态 s t s_{t} st的行动的优势的估计, R t R_{t} Rt是 Q π ( s t , a t ) Q_{\pi}(s_{t},a_{t}) Qπ(st,at)的估计值, b t b_{t} bt是 V π ( s t ) V_{\pi}(s_{t}) Vπ(st)的估计值。
这里的优势其实也可以这么理解,对于值函数和动作值函数树来说,
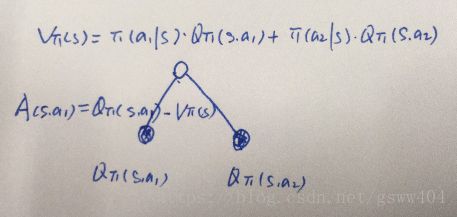
其中的 v π v_{\pi} vπ可以理解为在该状态s下所有可能动作对应的动作值函数乘采取该动作的概率的和,通俗的说,值函数 V ( s ) V(s) V(s) 是该状态下所有动作值函数关于动作概率的期望,而动作值函数 Q ( s , a ) Q(s,a) Q(s,a) 是单个动作所对应的值函数,因此 Q ( s t , a t ) − V ( s t ) Q(s_{t},a_{t})-V(s_{t}) Q(st,at)−V(st)能评价当前动作值函数相对于平均值的大小。
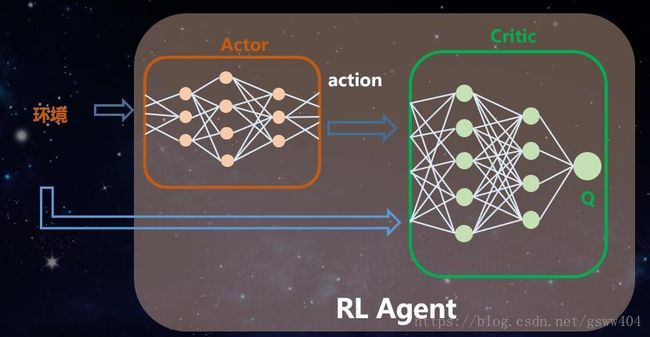
这种方法可以被视为一种行为者 - 批评者的架构",框架结构如下,他们共同组成了强化学习的智能体:
接下来论文中讲述了Q_Learning等一系列方法,并在离散型、连续性控制任务中进行了测试,但是本文重点讲述A3C算法,为什么呢?
因为A3C既可以解决离散型控制,也可以进行连续性动作空间的控制
继续回到前面图片。因此目标就是找到一个优秀的策略, 为了得到更好的 policy,我们必须进行训练更新。那么,如何来优化这个问题呢?我们需要某些度量来衡量的好坏。我们定义一个函数 J ( π ) J(\pi) J(π),表示一个策略所能得到的折扣的奖赏,从初始状态 S 0 S_{0} S0出发得到的所有的平均:
J ( π ) = E ρ s 0 [ V ( s 0 ) ] J(\pi) = E_{\rho^{s_{0}}}[V(s_{0})] J(π)=Eρs0[V(s0)]
我们发现这个函数的确很好的表达了一个 policy 有多好。但是问题是很难估计,我们需要关注的仅仅是如何改善其质量就行了。如果我们知道这个 function 的 gradient,就变的很 trivial
梯度的推到过程见 Policy Gradient 的原始paper:Policy Gradient Methods for Reinforcement Learning with Function Approximation
或者是 David Silver 的 YouTube 课程:https://www.youtube.com/watch?v=KHZVXao4qXs
而策略梯度公式可以表示为:
∇ θ J = E s ∼ ρ s 0 , a ∼ π ( s ) [ A ( s , a ) ⋅ ∇ θ log π ( a ∣ s ) ] \nabla_{\theta} J = E_{s \sim \rho^{s_{0}}, a \sim \pi(s)}[A(s,a) \cdot \nabla_{\theta}\log \pi(a|s)] ∇θJ=Es∼ρs0,a∼π(s)[A(s,a)⋅∇θlogπ(a∣s)]
简单而言,这个期望内部的两项:
第一项,是优势函数,选择该 action 的优势,当低于 average value 的时候,该项为 negative,当比 average 要好的时候,该项为 positive;是一个标量(scalar)
第二项,告诉我们了使得 log 函数 增加的方向;
到这里,所有的问题就在actor-critic框架上,即对policy梯度和值函数的更新,那么我们首先要计算的是优势函数 A ( s , a ) A(s,a) A(s,a)将其展开:
A ( s , a ) = Q ( s , a ) − V ( s ) = r + γ V ( s ′ ) − V ( s ) A(s,a) = Q(s,a)-V(s) = r+\gamma V(s^{'})-V(s) A(s,a)=Q(s,a)−V(s)=r+γV(s′)−V(s)
运行一次得到的 sample 可以给我们提供一个 Q ( s , a ) Q(s, a) Q(s,a) 函数的 unbiased estimation。我们知道,这个时候,我们仅仅需要知道 V(s) 就可以计算 A(s, a)。这个 value function 是容易用神经网络来计算的,就像在 DQN 中估计 action-value function 一样。相比较而言,这个更简单,因为 每个 state 仅仅有一个 value。
可以总结为:
actor:优化这个 policy,使得其表现的越来越好;
critic:尝试估计 value function,使其更加准确;
好了到这里,基本上已经把Asynchronous advantage actor-critic中的advantage actor-critic说完了,最后就是到底怎么Asynchronous (异步)的呢?
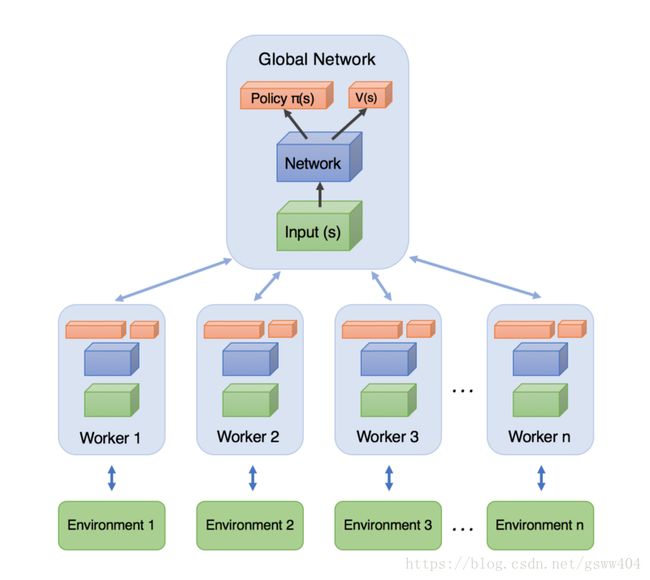
用一句话概括一下:训练的时候,同时为多个线程上分配task,学习一遍后,每个线程将自己学习到的参数更新(这里就是异步的思想)到全局Global Network上,下一次学习的时候拉取全局参数,继续学习。网络结构如图:
思考:每个异步更新是否能够使得全局网络的梯度逐渐下降呢?
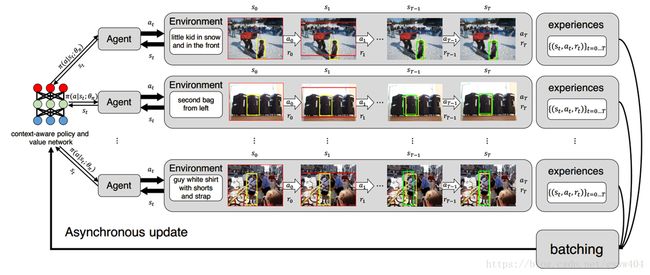
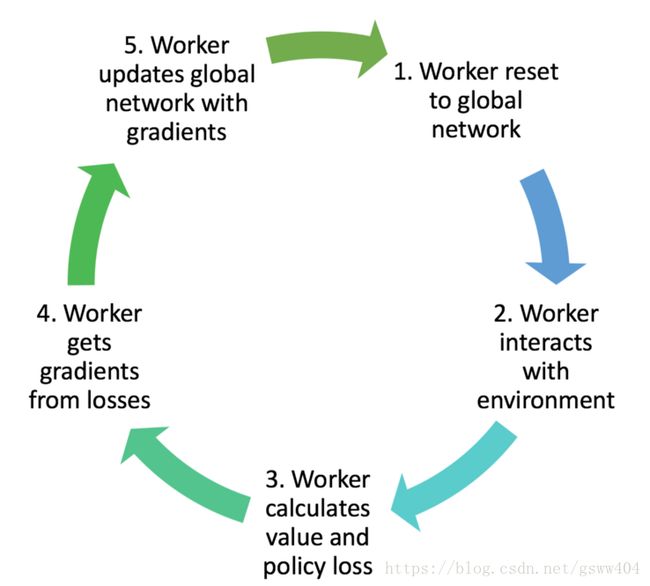
上图更加形象具体点的表示就是这样的图:
而算法的执行流程是:
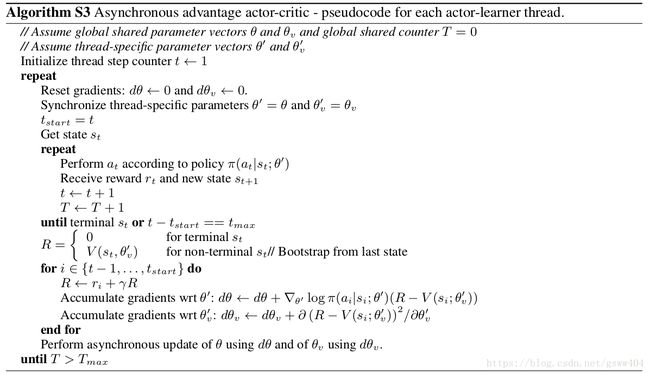
具体的算法伪代码如下:
本文以gym:Pendulum-v0 环境为例子,因为相对于一个状体,三个连续动作空间的摆干例子来说相对与容易解释。
tensorflow代码如下
import multiprocessing
import threading
import tensorflow as tf
import numpy as np
import gym
import os
import shutil
import matplotlib.pyplot as plt
GAME = 'Pendulum-v0'
OUTPUT_GRAPH = True
LOG_DIR = './log'
N_WORKERS = multiprocessing.cpu_count()
MAX_EP_STEP = 200
MAX_GLOBAL_EP = 2000
GLOBAL_NET_SCOPE = 'Global_Net'
UPDATE_GLOBAL_ITER = 10
GAMMA = 0.9
ENTROPY_BETA = 0.01
LR_A = 0.0001 # learning rate for actor
LR_C = 0.001 # learning rate for critic
GLOBAL_RUNNING_R = []
GLOBAL_EP = 0
env = gym.make(GAME)
# 获取状态,动作空间
N_S = env.observation_space.shape[0]
N_A = env.action_space.shape[0]
A_BOUND = [env.action_space.low, env.action_space.high]
class ACNet(object):
def __init__(self, scope, globalAC=None):
if scope == GLOBAL_NET_SCOPE: # get global network
with tf.variable_scope(scope):
self.s = tf.placeholder(tf.float32, [None, N_S], 'S')
self.a_params, self.c_params = self._build_net(scope)[-2:]
else: # local net, calculate losses
with tf.variable_scope(scope):
self.s = tf.placeholder(tf.float32, [None, N_S], 'S')
self.a_his = tf.placeholder(tf.float32, [None, N_A], 'A')
self.v_target = tf.placeholder(tf.float32, [None, 1], 'Vtarget')
mu, sigma, self.v, self.a_params, self.c_params = self._build_net(scope)
td = tf.subtract(self.v_target, self.v, name='TD_error')
with tf.name_scope('c_loss'):
self.c_loss = tf.reduce_mean(tf.square(td))
with tf.name_scope('wrap_a_out'):
mu, sigma = mu * A_BOUND[1], sigma + 1e-4
normal_dist = tf.distributions.Normal(mu, sigma)
with tf.name_scope('a_loss'):
log_prob = normal_dist.log_prob(self.a_his)
exp_v = log_prob * tf.stop_gradient(td)
entropy = normal_dist.entropy() # encourage exploration
self.exp_v = ENTROPY_BETA * entropy + exp_v
self.a_loss = tf.reduce_mean(-self.exp_v)
with tf.name_scope('choose_a'): # use local params to choose action
self.A = tf.clip_by_value(tf.squeeze(normal_dist.sample(1), axis=[0, 1]), A_BOUND[0], A_BOUND[1])
with tf.name_scope('local_grad'):
self.a_grads = tf.gradients(self.a_loss, self.a_params)
self.c_grads = tf.gradients(self.c_loss, self.c_params)
with tf.name_scope('sync'):
with tf.name_scope('pull'):
self.pull_a_params_op = [l_p.assign(g_p) for l_p, g_p in zip(self.a_params, globalAC.a_params)]
self.pull_c_params_op = [l_p.assign(g_p) for l_p, g_p in zip(self.c_params, globalAC.c_params)]
with tf.name_scope('push'):
self.update_a_op = OPT_A.apply_gradients(zip(self.a_grads, globalAC.a_params))
self.update_c_op = OPT_C.apply_gradients(zip(self.c_grads, globalAC.c_params))
def _build_net(self, scope):
w_init = tf.random_normal_initializer(0., .1)
with tf.variable_scope('actor'):
l_a = tf.layers.dense(self.s, 200, tf.nn.relu6, kernel_initializer=w_init, name='la')
mu = tf.layers.dense(l_a, N_A, tf.nn.tanh, kernel_initializer=w_init, name='mu')
sigma = tf.layers.dense(l_a, N_A, tf.nn.softplus, kernel_initializer=w_init, name='sigma')
with tf.variable_scope('critic'):
l_c = tf.layers.dense(self.s, 100, tf.nn.relu6, kernel_initializer=w_init, name='lc')
v = tf.layers.dense(l_c, 1, kernel_initializer=w_init, name='v') # state value
a_params = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope=scope + '/actor')
c_params = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope=scope + '/critic')
return mu, sigma, v, a_params, c_params
def update_global(self, feed_dict): # run by a local
SESS.run([self.update_a_op, self.update_c_op], feed_dict) # local grads applies to global net
def pull_global(self): # run by a local
SESS.run([self.pull_a_params_op, self.pull_c_params_op])
def choose_action(self, s): # run by a local
s = s[np.newaxis, :]
return SESS.run(self.A, {self.s: s})
class Worker(object):
def __init__(self, name, globalAC):
self.env = gym.make(GAME).unwrapped
self.name = name
self.AC = ACNet(name, globalAC)
def work(self):
global GLOBAL_RUNNING_R, GLOBAL_EP
total_step = 1
buffer_s, buffer_a, buffer_r = [], [], []
while not COORD.should_stop() and GLOBAL_EP < MAX_GLOBAL_EP:
s = self.env.reset()
ep_r = 0
for ep_t in range(MAX_EP_STEP):
# if self.name == 'W_0':
# self.env.render()
a = self.AC.choose_action(s)
s_, r, done, info = self.env.step(a)
done = True if ep_t == MAX_EP_STEP - 1 else False
ep_r += r
buffer_s.append(s)
buffer_a.append(a)
buffer_r.append((r+8)/8) # normalize
if total_step % UPDATE_GLOBAL_ITER == 0 or done: # update global and assign to local net
if done:
v_s_ = 0 # terminal
else:
v_s_ = SESS.run(self.AC.v, {self.AC.s: s_[np.newaxis, :]})[0, 0]
buffer_v_target = []
for r in buffer_r[::-1]: # reverse buffer r
v_s_ = r + GAMMA * v_s_
buffer_v_target.append(v_s_)
buffer_v_target.reverse()
buffer_s, buffer_a, buffer_v_target = np.vstack(buffer_s), np.vstack(buffer_a), np.vstack(buffer_v_target)
feed_dict = {
self.AC.s: buffer_s,
self.AC.a_his: buffer_a,
self.AC.v_target: buffer_v_target,
}
self.AC.update_global(feed_dict)
buffer_s, buffer_a, buffer_r = [], [], []
self.AC.pull_global()
s = s_
total_step += 1
if done:
if len(GLOBAL_RUNNING_R) == 0: # record running episode reward
GLOBAL_RUNNING_R.append(ep_r)
else:
GLOBAL_RUNNING_R.append(0.9 * GLOBAL_RUNNING_R[-1] + 0.1 * ep_r)
print(
self.name,
"Ep:", GLOBAL_EP,
"| Ep_r: %i" % GLOBAL_RUNNING_R[-1],
)
GLOBAL_EP += 1
break
if __name__ == "__main__":
SESS = tf.Session()
with tf.device("/cpu:0"):
OPT_A = tf.train.RMSPropOptimizer(LR_A, name='RMSPropA')
OPT_C = tf.train.RMSPropOptimizer(LR_C, name='RMSPropC')
GLOBAL_AC = ACNet(GLOBAL_NET_SCOPE) # we only need its params
workers = []
# Create worker
for i in range(N_WORKERS):
i_name = 'W_%i' % i # worker name
workers.append(Worker(i_name, GLOBAL_AC))
COORD = tf.train.Coordinator()
SESS.run(tf.global_variables_initializer())
if OUTPUT_GRAPH:
if os.path.exists(LOG_DIR):
shutil.rmtree(LOG_DIR)
tf.summary.FileWriter(LOG_DIR, SESS.graph)
worker_threads = []
for worker in workers:
job = lambda: worker.work()
t = threading.Thread(target=job)
t.start()
worker_threads.append(t)
COORD.join(worker_threads)
plt.plot(np.arange(len(GLOBAL_RUNNING_R)), GLOBAL_RUNNING_R)
plt.xlabel('step')
plt.ylabel('Total moving reward')
plt.show()
以上就是论文的部分和A3C算法原理及代码实现,
另外至于原始论文的实验参数、过程,后续持续补充…
源码github:点击查看源代码地址
本文参考了很多资料,在这里特别特别感谢,并感谢使用莫凡的代码例子。
参考文献:
[1].Asynchronous Methods for Deep Reinforcement Learning(paper)
[2].https://www.cnblogs.com/wangxiaocvpr/p/5681483.html
[3].https://www.cnblogs.com/wangxiaocvpr/p/8110120.html
[4].https://medium.com/emergent-future/simple-reinforcement-learning-with-tensorflow-part-8-asynchronous-actor-critic-agents-a3c-c88f72a5e9f2
[5].https://github.com/MorvanZhou/Reinforcement-learning-with-tensorflow/blob/master/contents/10_A3C/A3C_continuous_action.py