聚类分析:基于密度聚类的DBSCAN算法
对于簇形状不规则的数据,像k-means(聚类分析: k-means算法)这种基于划分的方法就不再适用了,因为划分方法(包括层次聚类算法)都是用于发现“球状簇”的。比如下面两个图中,Fig.1所示的数据分布用k-means作聚类是没有问题的,但是对于Fig.2就不行了,会把大量的噪声或者离群点也包含在簇中。
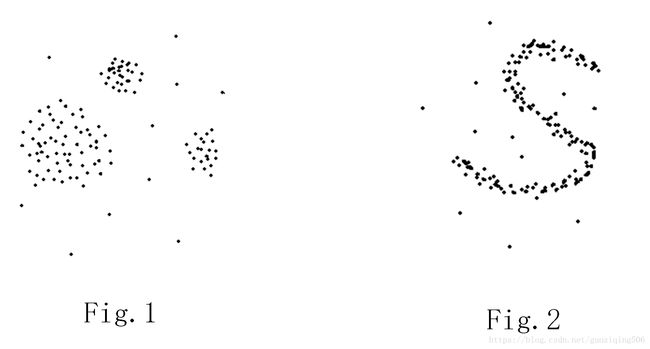
解决这种任意簇形状的聚类问题,就要采用一种与划分聚类或者层次聚类不同的聚类方法——基于密度聚类。对于基于密度的聚类,最常用的算法就是本文要说的DBSCAN(Density-Based Spatial Clustering of Application with Noise),简单直译过来就是“具有噪声应用的基于密度的空间聚类”。
概念介绍
在讲解DBSCAN具体的工作原理之前,先介绍关于这个算法的一些专门定义的概念。
核心对象:一个数据点可被称为核心对象,如果以这个数据点为球心,以长度 ϵ ϵ 为半径的超球面区域内,至少有 MinPts M i n P t s 个数据点。为了后面叙述简单,我将这个核心对象称为 (ϵ,MinPts) ( ϵ , M i n P t s ) -核心对象,将它的这个球面区域称为核心对象的 ϵ ϵ -邻域。
直接密度可达:对于 (ϵ,MinPts) ( ϵ , M i n P t s ) -核心对象 O1 O 1 和对象 O2 O 2 ,我们说 O2 O 2 是从 O1 O 1 直接密度可达的,如果 O2 O 2 在 O1 O 1 的 ϵ ϵ -邻域内。注意,这里只要求 O1 O 1 是核心对象,而 O2 O 2 可以是任意对象(数据点)。也就是说,定义“A从B(或从B到A)直接密度可达”中,作为出发点的 B B 一定得是核心对象。
密度可达:从核心对象 O1 O 1 到对象 On O n (这里同样不要求 On O n 是核心对象)是密度可达的,如果存在一组对象链 {O1,O2,…,On} { O 1 , O 2 , … , O n } ,其中 Oi O i 到 Oi+1 O i + 1 都是关于 (ϵ,MinPts) ( ϵ , M i n P t s ) 直接密度可达的。实际上,从这个定义我们不难看出, {O1,O2,…,On−1} { O 1 , O 2 , … , O n − 1 } 都必须是核心对象。
密度相连:两个对象 O1,O2 O 1 , O 2 (注意,这里不要求是核心对象)是密度相连的,如果存在一个对象 p p ,使得 p p 到 O1 O 1 , p p 到 O2 O 2 都是密度可达的。这个定义是对称的,即 O1 O 1 与 O2 O 2 是密度相连的,则 O2 O 2 与 O1 O 1 也是密度相连的。
上面4个定义中,后两个容易混淆。其实可以这样想,所谓密度可达,是说可以“一条道”走过去;而所谓密度相连,是说可以找到一个中间点,从这个中间点出发,可以分别“一条道”走到两边。
关于密度相连的理解是整个DBSCAN算法的核心,他实际代表的意义可以这样理解:对于任意形状的簇来说,一定存在这样一个点,使得组成这个簇的点都能从这个点出发,通过一条“稠密”的路径到达。换句话说,簇中的点一定是相互密度相连的。
还有两个区别于“核心对象”的概念,那就是“噪声对象”和“边缘对象”。在用DBSCAN对数据做聚类分析时,“噪声对象”也是一个非常重要的结果。所以,最好的算法是在给出聚好的类之外,也给出噪声点。为了让整个算法看起来清晰,我在讲解算法步骤之前,先给出“噪声对象”和“边缘对象”的定义。
- 噪声对象:不是核心对象,且也不在任何一个核心对象的 ϵ ϵ -邻域内;
- 边缘对象:顾名思义是类的边缘点,它不是核心对象,但在某一个核心对象的 ϵ ϵ -邻域内;
总之,对于数据集中的任意一个点,它要么是核心对象,要么是噪声对象,要么是边缘对象。
算法思路
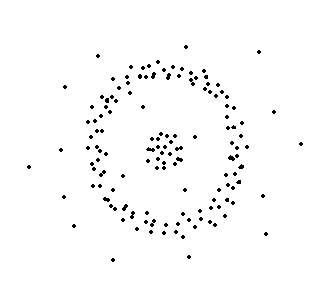
现在我们来思考怎样解决非球状簇的聚类问题。直观上来想象,既然是要找任意形状的簇,那么最直接的办法是先找到一个核心对象,再找到与这个核心对象密度相连的所有点,这些点将构成这个簇。比如下图中,假设当前我们要找的簇是外层的圆圈,很显然,内层圆上的点与外层圆圈上的点肯定不是密度相连的,而且其他的离群点与外层这个圆圈的点也不是密度相连的。所以,只要我们选择合适的参数,就一定可以通过簇中的任意一个核心对象,拓展找到所有的簇中所有的点(当然,这些点都是密度相连的)。
具体算法的工作原理可以这样来设计:
初始化阶段,给所有数据点赋一个unvisited的属性,表示这个数据点未被访问;
1.在所有属性为unvisited的点集中,随机找一个点 p p ,标记为visited;
2.检查它是否为核心对象,若不是,标记 p p 为噪声点,再重新开始寻找(像第1步中那样);若是,则执行后面的步骤;
注1:前两部的目的在于找到一个核心对象,作为一个新簇的初始(第一个)对象。
注2:2步中标记为噪声的点不一定真的是噪声点,它也有可能是边缘点,所以如果要得到准确的噪声集合,需要在后面做进一步筛选。
既然找到了第一个核心对象,接下来的步骤就是创建第一个类了(记为 C C ):
3.建立一个候选集 Candidates C a n d i d a t e s ,初始时, Candidates C a n d i d a t e s 中只有一个元素,那就是上一步找到的核心对象;
4.对于 Candidates C a n d i d a t e s 中的每一个对象(记为 p p ),做以下操作:
(1) 若 p p 还未被聚到任意一个类,则加入类 C C ;
(2) 若 p p 是核心对象,则将它的 ϵ ϵ -邻域内的,除了当前类 C C 的点之外的点(也就是 Candidates−C C a n d i d a t e s − C )加入 Candidates C a n d i d a t e s ;
(3) 若 p p 在噪声集合内,将它从噪声集合移除(因为肯定不是噪声);
(4) 若 p p 的属性是unvisited,则标记为visited;
注:(3)(4)两步属于常规操作,无需多想,重点在于(1)(2)步。因为 Candidates C a n d i d a t e s 中的每一个对象要么是核心对象,要么是核心对象的 ϵ ϵ -邻域内的点,所以肯定和其核心对象是直接密度可达的,进而可以知道 Candidates C a n d i d a t e s 中的这些点都是密度相连的。所以当 p p 还不属于任何类时,我们可以毫不犹豫地将 p p 加入类 C C ;(2)步中需要注意的是,因为当前类 C C 的点已经分析过了,所以不用再次加入 Candidates C a n d i d a t e s 了,否则会导致一个死循环。
5.循环执行第4步,直到 Candidates C a n d i d a t e s 中找不到核心对象为止,这说明当前这个类已经被找完全了。
6.返回第1步,开始找下一个簇。直到所有的点都变成visited.
代码实现
下面,我将给出实现代码。首先,为了验证代码的正确性,我造了一个数据集(没办法,找资料的能力差,实在在网上找不到特别合适的),这个数据集的图像画出来如下图所示:
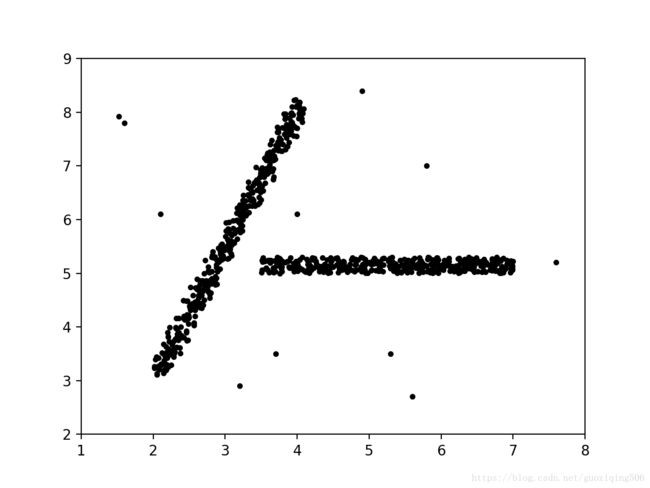
具体的数据集我保存了一个csv文件,在文章最后给出的我的github主页里,名字叫”data.csv”。然后根据上面算法的工作原理,给出实现代码。
首先是建一个数据对象的类,方便写后面的算法:
import numpy as np
class DataPoint(object):
def __init__(self, coordinates):
"""
:param coordinates: the ndarray object
"""
self.coordinates = coordinates
self.neighborhood = set()
def isCore(self, db, radius, minPts):
"""
:param db: the database whose elements are DataPoint objects.
:param radius: the radius of a point's neighborhood
:param minPts:
:return:
"""
for i in db:
if np.linalg.norm(self.coordinates - i.coordinates) <= radius:
self.neighborhood.add(i)
if len(self.neighborhood) >= minPts:
return True
return False
然后给出聚类算法:
def dbscan(db, radius, minPts):
"""
:param db:
:param radius:
:param minPts:
:return:
"""
visited = set()
noise = set()
results = []
while len(visited) < len(db):
core = None
C = set()
# find the core point
temp = set()
for point in db - visited:
temp.add(point)
if point.isCore(db - {point}, radius, minPts):
core = point
break
else:
noise.add(point)
visited.update(temp)
# can't find any core point, i.e., the cluster process should be terminated
if not core:
break
# construct the new cluster C
flag = True
candidates = {core}
# flag denotes whether there is at least one core point in candidates
while flag:
flag = False
tempCandidates = set()
for member in candidates:
# remove the boundary points in noise
if member in noise:
noise.remove(member)
# label the cur as visited
if member not in visited:
visited.add(member)
# if cur not belongs to other clusters, add it in the cluster C
belongToOtherCluster = False
for cluster in results:
if member in cluster:
belongToOtherCluster = True
break
if not belongToOtherCluster:
C.add(member)
# if cur is core, add its neighborhood in tempCandidates
if member.isCore(db - {member}, radius, minPts):
tempCandidates.update(member.neighborhood - C)
flag = True
candidates = set() | tempCandidates
results.append(C)
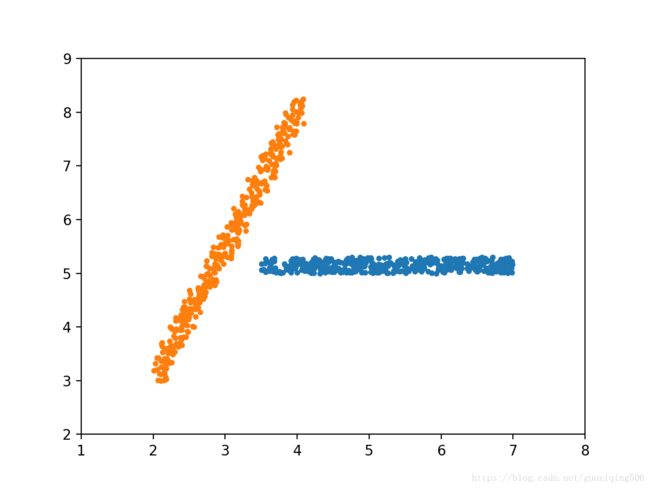
return results根据我的数据点,我调整参数 (ϵ,MinPts) ( ϵ , M i n P t s ) 为 (0.2,3) ( 0.2 , 3 ) ,最后清晰地得到两个类,作图如下:
完整的实现代码,包括如何生成数据集,DBSCAN算法,还有作图的函数都在我的github主页里:DBSCAN,欢迎大家参考挑错。