VREP循迹小车
VREP循迹小车
- VREP循迹小车
- 代码
VREP循迹小车

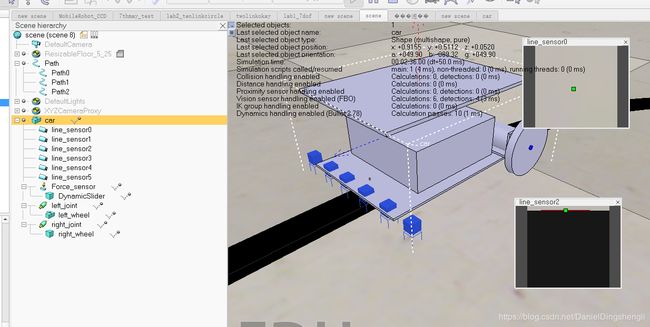
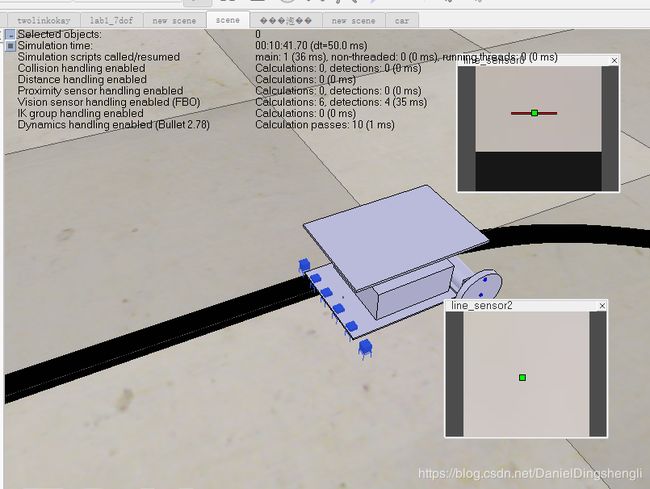
蓝色部分是视觉传感器
黑色是路径
代码
#Getting motor handles
errorCode,left_motor_handle=vrep.simxGetObjectHandle(clientID,"left_joint",vrep.simx_opmode_oneshot_wait)
errorCode,right_motor_handle=vrep.simxGetObjectHandle(clientID,"right_joint",vrep.simx_opmode_oneshot_wait)
sensor_h=[] #handles list
sensor_val=[] #Sensor value list
#Getting sensor handles list
for x in range(0,6):
errorCode,sensor_handle=vrep.simxGetObjectHandle(clientID,'line_sensor'+str(x),vrep.simx_opmode_oneshot_wait)
sensor_h.append(sensor_handle) #It is adding sensor handle values
errorCode,detectionstate, sensorreadingvalue=vrep.simxReadVisionSensor(clientID,sensor_h[x],vrep.simx_opmode_streaming)
sensor_val.append(1.0) #It is adding 1.0 to fill the sensor values on the list. In the while loop it is going to overwrite the values
time.sleep(1)
t = time.time() #It is saving the time which is now
while (1): #Cycle which doesn't end
#It is writing down sensor handles and reading values
summa = 0 #It is zeroing the sum
andur = 0 #and the sensor values
for x in range(0,6):
errorCode,detectionstate, sensorreadingvalue=vrep.simxReadVisionSensor(clientID,sensor_h[x],vrep.simx_opmode_buffer)
#Reading sensor values
sensor_val[x]=sensorreadingvalue[1][0] #It is overwriting the sensor values
print "Positsiooni väärtus kokku45 :",sensor_val[x] ,x
if sensor_val[2]<=0.2 or sensor_val[3]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,10, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,10, vrep.simx_opmode_streaming)
if sensor_val[1]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,13, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,10, vrep.simx_opmode_streaming)
if sensor_val[0]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,16, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,10, vrep.simx_opmode_streaming)
if sensor_val[4]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,10, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,13, vrep.simx_opmode_streaming)
if sensor_val[5]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,10, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,16, vrep.simx_opmode_streaming)
viivitus = round((time.time()-t),5) #calculating delay time
print "viivitus on: ", viivitus
t = time.time() #Taking new time moment

原理解释: