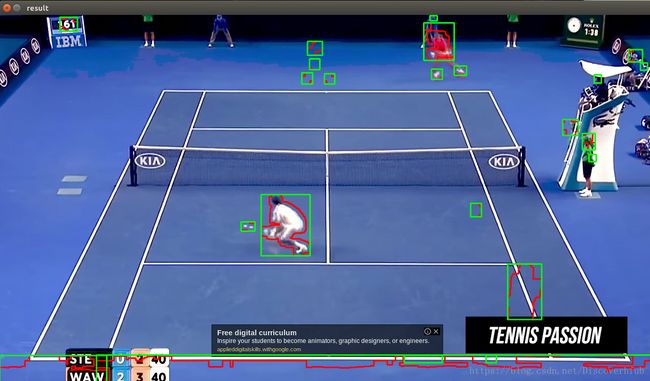
运动物体检测——帧差法&///运动物体检测——背景减法
1、注意,使用的是opencv3,所以在cmakelists.txt加上(系统默认安装的是opencv2)
set(OpenCV_DIR /usr/local/opencv3/share/OpenCV)2、在cmakelists.txt加上
add_executable(node1 src/node1.cpp)
target_link_libraries(node1
${catkin_LIBRARIES}
)
add_executable(node2 src/node2.cpp)
target_link_libraries(node2
${catkin_LIBRARIES}
)运动物体检测——帧差法
///运动物体检测——帧差法
#include "opencv2/opencv.hpp"
using namespace cv;
#include 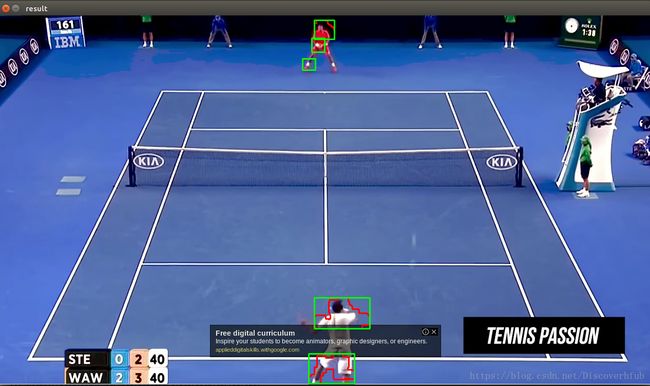
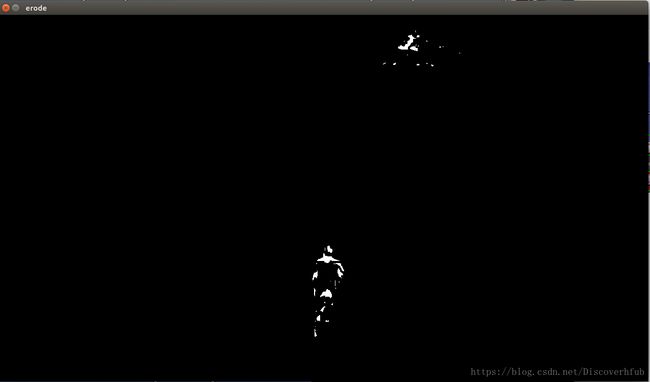
运动物体检测——背景减法
///运动物体检测——背景减法
/// https://blog.csdn.net/abc8730866/article/details/70170267
#include "opencv2/opencv.hpp"
using namespace cv;
#include