Python初步实现车道线检测
车道线检测是一个常见的问题,本文主要介绍如何简单有效的用python实现这个功能
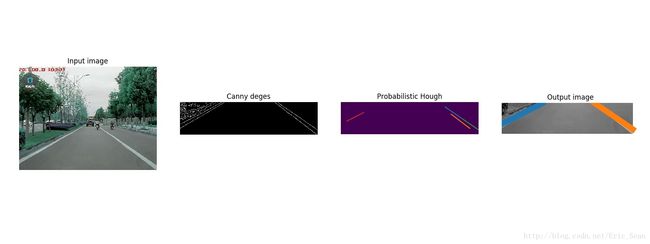
主要思路
1 读取图像并选择感兴趣的区域ROI进行下一步处理
2 对ROI区域进行预处理包括灰度化,膨胀和腐蚀
3 对预处理后的图像进行边缘检测(Canny算子)
4 对边缘检测后度图像进行概率霍夫变化得到多条直线
5 对直线进行分组,根据斜率分成左线和右线
6 选择左右线各一条,之后scale直线是其延伸至边界
To do things:
1在连续图片的车道线检测中会有水平的直线,需要处理
2某几帧没有检测结果用之前的结果代替
3弯道车道线检测
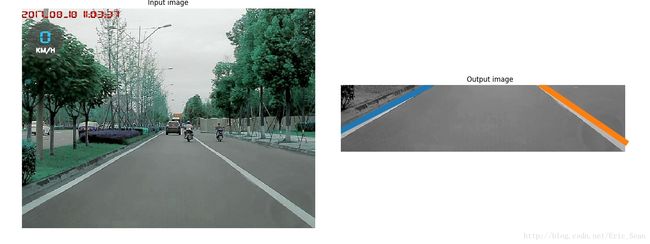
结论:
对简单单调的环境效果不错
依赖参数的设置
**
效果展示
原始图片

输出结果
代码展示
#created by BOXIAO 27/09/2017
#all rights reserved
import os
import cv2
import sys
import numpy as np
import skimage.transform as st
import matplotlib.pyplot as plt
from skimage import feature
#预处理图像膨胀和腐蚀(可选)
def preprocessimage(img):
kernel=np.uint8(np.zeros((5,5)))
for x in range(5):
kernel[x,2]=1
kernel[2,x]=1
eroded=cv2.erode(img,kernel)
dilated = cv2.dilate(img, kernel)
result = cv2.absdiff(dilated, eroded)
return result
#scale所得的车道线,使其充满屏幕
def scale_lines(chooses_lines):
final_lines=[]
for line in choose_lines:
p0, p1 = line
k = np.float32(((p0[1]-p1[1])*1.0)/(1.0*(p0[0]-p1[0])))
b = np.float32(p1[1] - k*p1[0])
y1=0
x1=-b/k
if k < 0:
x2=0
y2=b
else:
x2=640
y2=640*k+b
line=((x1,y1),(x2,y2))
final_lines.append(line)
return final_lines
if __name__ == '__main__':
input_dir=sys.argv[1]
output_dir=sys.argv[2]
data_dir='/home/b_xi/codes/lanedetection/mymethod'
frames_list = os.listdir(input_dir)
frames_list.sort()
for f, frame in enumerate(frames_list):
img = cv2.imread(os.path.join(data_dir,input_dir,frame))
ROI=[330,480,0,640]
ROI_img=img[ROI[0]:ROI[1],ROI[2]:ROI[3]]
image = cv2.cvtColor(ROI_img,cv2.COLOR_BGR2GRAY)
edges = feature.canny(image, sigma=2, low_threshold=2, high_threshold=25)
all_lines = st.probabilistic_hough_line(edges, threshold=10, line_length=70,line_gap=0)
#根据斜率将直线分为两组:左直线和右直线
left_lines = []
right_lines = []
for line in all_lines:
p0, p1 = line
theta = np.abs(np.arctan2((p0[0] - p1[0]), (p0[1] - p1[1])))
if theta > 1:
left_lines.append(line)
else:
right_lines.append(line)
choose_lines = [left_lines[0], right_lines[0]]
# scaling left and right lines
lines=scale_lines(choose_lines)
#绘图并且保存
fig, (ax0,ax1,ax2,ax3) = plt.subplots(1, 4, figsize=(16, 6))
plt.tight_layout()
ax0.imshow(img)
ax0.set_title('Input image')
ax0.set_axis_off()
ax1.imshow(edges,plt.cm.gray)
ax1.set_title('Canny deges')
ax1.set_axis_off()
ax2.imshow(edges*0)
for line in all_lines:
p0, p1 = line
ax2.plot((p0[0], p1[0]), (p0[1], p1[1]))
row2, col2 = image.shape
ax2.axis((0, col2, row2, 0))
ax2.set_title('Probabilistic Hough')
ax2.set_axis_off()
ax3.imshow(image, plt.cm.gray)
for line in lines:
p0, p1 = line
ax3.plot((p0[0], p1[0]), (p0[1], p1[1]),linewidth=10.0)
ax3.set_title('Output image')
ax3.set_axis_off()
plt.savefig(os.path.join(data_dir,output_dir,frame))
plt.show()
## 最后 ##
在学习代码的过程中不断度阅读他人的博客,给了我极大的帮助,希望之后自己也可以不断分享学习感悟,最后感谢开源。