Frequency Filters-2
matlab的fft2函数可以实现求解图像的DFT,比如下面的这张图片,

通过matlab可以获得它的DFT图像(frequency spectrum)
img = rgb2gray(im);
>> ft = fft2(img);
>> imshow(log(abs(ft)),[]);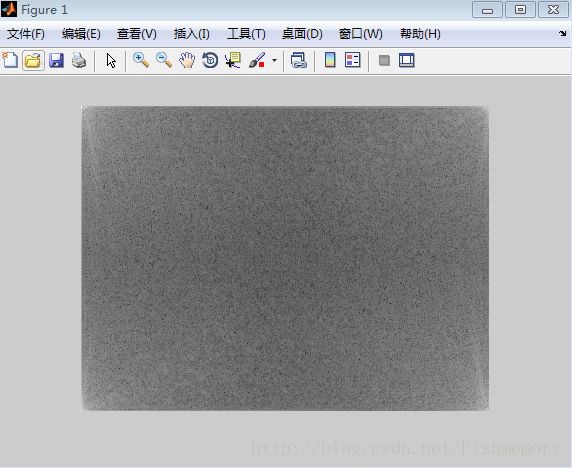
按照前面章节的说明,当前显示的结果同时覆盖了四个循环区域,使用fftshift函数进行调整,得到如下图示,
>> fts = fftshift(ft);
>> imshow(log(abs(fts)),[]);
图示中,中间高亮部分是低频部分,由中间向四周频率越来越高,低频对应的是图像中梯度平缓的地方,而高频对应的是图像中梯度较大的地方,如边缘等。我们发现,在DFT结果中,存在明显的“十字”形状,这主要是由于DFT的周期性导致图像拼接处存在强烈的色差形成较大梯度区域,从下图的红色框区域内可明显看出。
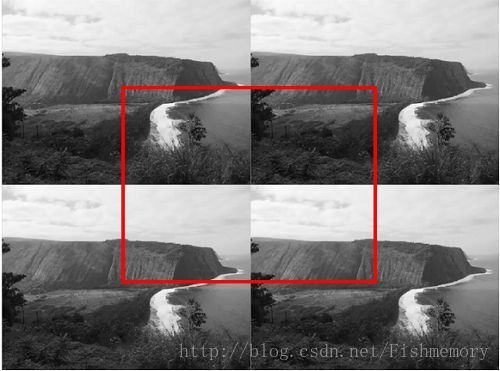
再看下面这个图像,左侧为原图像,中间为shift之后的图像(不存在明显的过渡边缘),右侧为对应的DFT图像,相比于前面的图像来说,则不存在这种边缘现象。

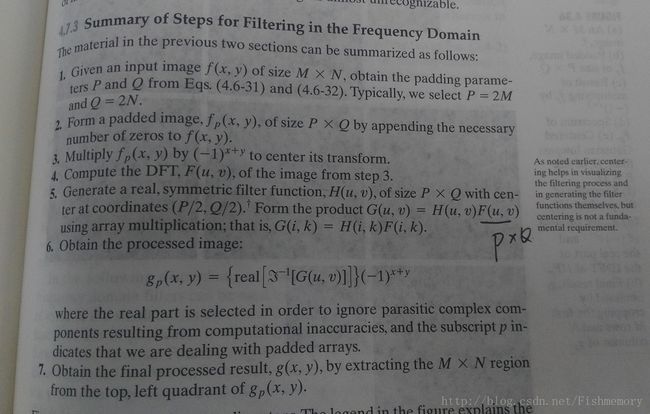
我们先来介绍下频率域滤波的基本步骤:
接下来,将介绍几种低通滤波和高通滤波应用,低通滤波可以保留图像的低频信息而丢弃部分高频信息,由于高频信息对应于图像中梯度变化较大的区域,如边缘等,所以低通滤波的效果实际上是等同于图像平滑效果;同样的,可以推测高通滤波则等同于图像的边缘提取。
低通滤波
三种常见的低通滤波:理想低通滤波(ILPF)、Butterworth低通滤波(BLPF)以及高斯低通滤波(GLPF)。
1.理想低通滤波:理想低通滤波的原理很简单,它只是简单地截断频谱上半径区域 D0 外所有的频率信息,而完全保留 D0 内的低频信息。滤波函数定义为,
其中, D0 为截断半径, D(u,v) 为频谱上点 (u,v) 与频谱中心 (P/2,Q/2) 的距离,以下公式中符号意义相同,
2.Butterworth低通滤波:
Butterworth的基本形式为,
3.高斯低通滤波:
Butterworth的基本形式为,
我们先来比较三种低通滤波的基本形状,
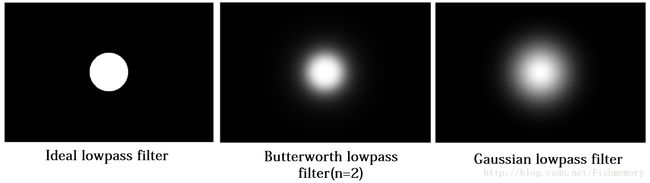
Butterworth低通滤波和高斯低通滤波相比于理想低通滤波而言,边界过度较为平滑,我们再来看三种滤波函数作用于图像频域率后的平滑效果,
原图为


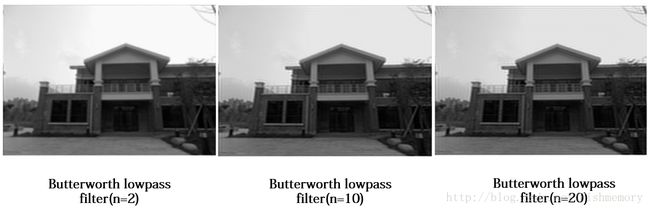
仔细比较,可以发现理想低通滤波图像中,存在“波形”,尤其沿建筑边缘处较为明显。这种“blurring&ringing”现象是理想低通滤波存在的重要弊端。实际上,Butterworth低通滤波也有可能存在“ringing”现象,当Butterworth低通滤波公式中的n取值越大时,这种“ringing”现象会变得尤为明显。所以,通常Butterworth低通滤波取较小n值,以避免“ringing”现象的出现。
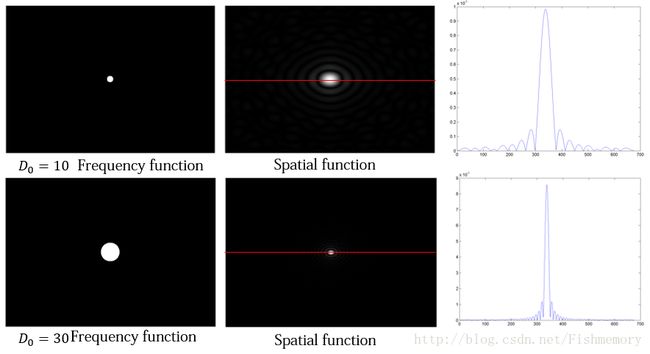
理想低通滤波中,“ringing”现象的产生实际上是与滤波函数本身有关的,理想低通滤波函数的基本形状类似于脉冲函数,转换至空间域后,函数形状类似于sinc波形。下图分别展示了截断半径分别为10和20频率域上的滤波函数(第一列)与空间上相应的滤波函数(第二列),以及空间域上红线处的像素值大小(第三列)。空间域上函数最中间的高峰值是图像平滑的主要原因,而外侧的小波形则是导致滤波图像“ringring”的主要原因。另外,我们可以发现,频率域上截断半径越大,转换至空间域上函数波形越密集。
高通滤波
高通滤波与低通滤波正好是相反的过程,保留高频信息,去掉低频信息,从而获得图像的边缘信息。与低通滤波相似,这里也只列出三种高通滤波:理想高通滤波、Butterworth高通滤波以及高斯高通滤波。
1.理想低通滤波:
2.Butterworth低通滤波:
Butterworth的基本形式为,
3.高斯低通滤波:
Butterworth的基本形式为,
三种滤波函数的基本形状,
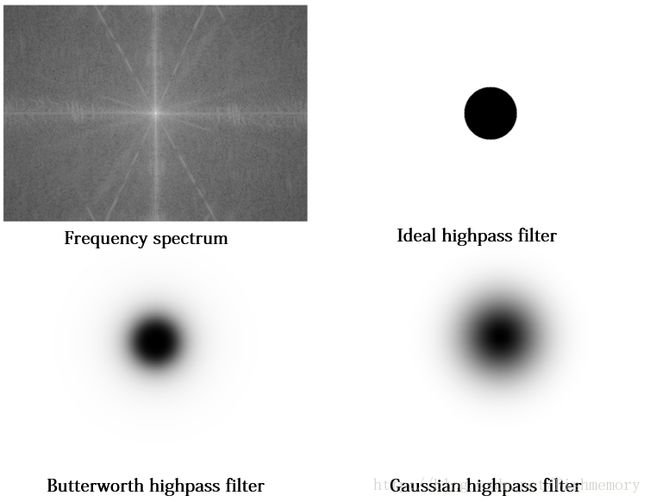
以及滤波效果,

与低通滤波相似,理想高通滤波也存在“ringing”现象。
function filter_img = fft_smothing(img, method, thred)
[rows,cols,chls] = size(img);
if chls == 3
img = rgb2gray(img);
end
%DFT
ft = fft2(img);
ftshift = fftshift(ft);
if strcmp(method,'ideal')
filter = ideal_lowpass_filter(thred, rows, cols);
elseif strcmp(method, 'butterworth')
n = 2;
filter = butterworth_lowpass_filter(thred, rows, cols, n);
elseif strcmp(method, 'Gaussian')
filter = Gaussian_lowpass_filter(thred, rows, cols);
else
fprintf('No such smothing type!');
end
tran_frequency = ftshift.*filter;
filter_img = ifft2(tran_frequency);
end
function filter = ideal_lowpass_filter(thred, rows, cols)
or = floor(rows/2);
oc = floor(cols/2);
[cidx,ridx] = meshgrid(1:cols,1:rows);
filter_val = @(x) x <= thred;
cshift = bsxfun(@minus, cidx, oc);
rshift = bsxfun(@minus, ridx, or);
filter = arrayfun(filter_val,sqrt(cshift.*cshift + rshift.*rshift));
end
function filter = butterworth_lowpass_filter(thred, rows, cols, n)
or = floor(rows/2);
oc = floor(cols/2);
[cidx,ridx] = meshgrid(1:cols,1:rows);
filter_val = @(x) 1/(1+(x/thred)^(2*n));
cshift = bsxfun(@minus, cidx, oc);
rshift = bsxfun(@minus, ridx, or);
filter = arrayfun(filter_val,sqrt(cshift.*cshift + rshift.*rshift));
end
function filter = Gaussian_lowpass_filter(thred, rows, cols)
or = floor(rows/2);
oc = floor(cols/2);
[cidx,ridx] = meshgrid(1:cols,1:rows);
filter_val = @(x) exp(-x^2/(2*thred*thred));
cshift = bsxfun(@minus, cidx, oc);
rshift = bsxfun(@minus, ridx, or);
filter = arrayfun(filter_val,sqrt(cshift.*cshift + rshift.*rshift));
end