- 高级Qt信号槽编程技巧
QT性能优化QT原理源码QT界面美化
qtqt6.3qt5QT教程c++
高级Qt信号槽编程技巧补天云火鸟博客创作软件补天云网站1Qt高级信号槽编程基础1.1Qt核心概念和机制介绍1.1.1Qt核心概念和机制介绍Qt核心概念和机制介绍高级Qt信号槽编程技巧,Qt核心概念与机制详解引言,在深入探讨Qt中高级信号槽编程技巧之前,我们先对Qt的核心概念及其工作机制进行一番了解。Qt是一个跨平台的应用程序开发框架,广泛应用于桌面、移动和嵌入式设备上。其设计思想强调了组件化、模块
- 深入理解Qt Widgets UI设计与实现
QT性能优化QT原理源码QT界面美化
qtqt6.3qt5QT教程c++
深入理解QtWidgetsUI设计与实现补天云火鸟博客创作软件补天云网站1响应式编程进阶1.1理解信号和槽机制1.1.1理解信号和槽机制理解信号和槽机制深入理解QtWidgetsUI设计与实现,信号与槽机制在深入探讨QtWidgetsUI设计与实现过程中,理解信号与槽这一核心概念是构建动态、响应式用户界面的关键。无论是开发基于事件驱动的应用程序还是构建复杂交互功能,Qt的信号与槽机制提供了一种高效
- Python 项目__init__.py 文件作用
KillFuckBugs
pythonpython开发语言
在Python项目中,__init__.py文件有以下几个主要作用:1.将目录标识为包当一个目录中包含__init__.py文件时,Python会将该目录识别为一个包。这允许开发者通过模块导入的方式访问该目录中的内容。例如:目录结构:project/mypackage/__init__.pymodule1.pymodule2.py导入示例:pythonfrommypackageimportmodu
- 移动光猫之桥接教程
猫耳朵朵
router
背景:移动宽带默认是移动光猫拨号,使用的路由模式,但移动的猫太差劲,需要将移动光猫改为桥接模式,改用红米AC2100路由器进行拨号上网。说干就干,开工。1、获取光猫超级用户和密码。用户名:CMCCAdmin超级密码:aDm8H%MdA2、登录光猫,进入设置界面。3、删除原有路由模式的拨号连接,截图保存原有设置参数,一定要删除。然后新建一个internet连接。4、新建的Internet连接参数,设
- windows蓝牙驱动开发-生成和发送蓝牙请求块 (BRB)
程序员王马
Windows蓝牙驱动开发驱动开发
以下过程概述了配置文件驱动程序生成和发送蓝牙请求块(BRB)应遵循的一般流程。BRB是描述要执行的蓝牙操作的数据块。生成和发送BRB分配IRP。分配BRB,请调用蓝牙驱动程序堆栈导出以供配置文件驱动程序使用的BthAllocateBrb函数。;初始化BRB的参数。每个BRB都使用相应的结构。根据预期用途设置结构的成员;初始化IRP的参数。将IRP的MajorFunction成员设置为IRP_MJ_
- 低代码平台放入外部链接有缓存不生效
不要秃头啊啊
缓存
在低代码平台中,放入外部链接时如果遇到缓存不生效的问题,通常是因为浏览器缓存了页面内容,导致外部链接的变化无法及时反映。为了解决这个问题,可以采用以下几种方法:使用时间戳或唯一标识符在外部链接后添加一个动态参数,例如时间戳,确保每次加载时浏览器都认为这是一个新的请求。可以通过以下方式来生成时间戳:">这里,******是PHP代码,每次请求时都会返回一个新的时间戳,防止浏览器缓存旧的内容。使用if
- MyBatis-Plus 逆向工程原理及使用指南
吴冰_hogan
mybatisoracletomcat
概述MyBatis-Plus(简称MP)是MyBatis的增强工具,它简化了开发人员对数据库的操作,并提供了代码生成器、分页插件等功能。其中的代码生成器(即逆向工程),能够根据数据库中的表结构自动生成实体类(Entity)、Mapper接口、Service层及Controller层的基础代码,从而极大地减少了开发初期的手动编码工作量。逆向工程原理数据库元数据读取:MyBatis-Plus使用JDB
- Ribbon 入门实战指南
吴冰_hogan
ribbonribbonspringcloud后端springcloud
Ribbon是Netflix开发的一个开源项目,用于实现客户端负载均衡功能。它在微服务架构中广泛使用,并且是SpringCloud生态中的重要组成部分。本文将带你从基础入门,逐步掌握如何在SpringCloud项目中使用Ribbon实现客户端负载均衡。1负载均衡简介负载均衡是一种将工作任务分摊到多个操作单元上的技术,以提高系统的响应速度和稳定性。负载均衡主要分为两种类型:客户端负载均衡:由客户端通
- 媒体报道 | 融资300万刀 再创业他做软件研发管理平台 服务科大讯飞等30客户
ones
铅笔道ONES◆王颖奇认为,创业没有什么诀窍,找到方向猛劲干就好了。文|铅笔道记者吴泽骞►导语毕业以后,王颖奇的工作几乎都是围绕着“软件工具”和“生产力”而开展的。从金山软件研发WPS,到首次创业开发“正点闹钟”,再到现在打造的“ONES”,他一直在自己熟悉的软件工具开发方向上摸索。“ONES”是一个专业级项目研发管理平台,它的目标客户是以软件研发为核心、人数超过100人的中大型企业,主要解决解决
- Redis分布式锁
赶路人儿
nosql分布式锁
Redis分布式锁分布式锁在很多场景中是非常有用的原语,不同的进程必须以独占资源的方式实现资源共享就是一个典型的例子。有很多分布式锁的库和描述怎么实现分布式锁管理器(DLM)的博客,但是每个库的实现方式都不太一样,很多库的实现方式为了简单降低了可靠性,而有的使用了稍微复杂的设计。这个页面试图提供一个使用Redis实现分布式锁的规范算法。我们提出一种算法,叫Redlock,我们认为这种实现比普通的单
- ARP解析MAC地址的全过程(ARP的工作机制)
luobin2024
ARP解析MAC地址需要了解的:以太网环境下,同一个网段的主机之间需要互相知道对方的MAC地址,才能访问。TCP/IP协议栈从上层到下层的封装过程中,第三层封装需要知道目的IP,第二层封装需要知道目的MAC。目的IP一般由用户手工输入,或者由应用程序填充,也可以通过名称解析系统解析得到,而目的MAC就需要使用ARP来解析。ARP解析MAC地址的过程:第一步:上层应用产生数据,这里用FTP协议为例,
- 【2025】告别JIRA:5款强大的项目管理工具你不能错过!
在项目管理的广阔天地里,Trello曾是不少团队的得力助手,它的看板管理模式简单直观,助力许多项目顺利推进。然而,随着时间的推移和业务的不断发展,部分团队可能会察觉到Trello在某些层面难以契合日益增长的复杂需求。如果你也正处于这样的阶段,别担心,今天就为你精心推荐5款强大的项目管理工具。这5款工具分别是禅道、ONES、Asana、Monday.com、ClickUp。它们各具特色,无论是在功能
- 【YARN】yarn 基础知识整理——hadoop1.0与hadoop2.0区别、yarn总结
时间的美景
HadoopYarnhadoophadoop1hadoop2大数据
文章目录1.hadoop1.0和hadoop2.0区别1.1hadoop1.01.1.1HDFS1.1.2Mapreduce1.2hadoop2.01.2.1HDFS1.2.2Yarn/MapReduce22.Yarn2.1Yarn(YetAnotherResourceNegotiator)概述2.2Yarn的优点2.3Yarn重要概念2.3.1ResourceManager2.3.2NodeMa
- 【深度学习|地学应用】遥感与深度学习:揭示梦柯冰川奥秘的前沿应用与实践解析
985小水博一枚呀
深度学习地学应用深度学习人工智能
【深度学习|地学应用】遥感与深度学习:揭示梦柯冰川奥秘的前沿应用与实践解析【深度学习|地学应用】遥感与深度学习:揭示梦柯冰川奥秘的前沿应用与实践解析文章目录【深度学习|地学应用】遥感与深度学习:揭示梦柯冰川奥秘的前沿应用与实践解析前言一、使用高分6号遥感影像结合深度学习对梦柯冰川的研究方向1.冰川边界自动化提取2.冰川变化动态监测3.冰川分类与分布特征分析二、梦柯冰川(MunkuGlacier)的
- 深入解析TCP/IP协议:网络通信的基石
一休哥助手
网络tcp/ip网络协议网络
1.引言TCP/IP协议是现代计算机网络的核心,它为互联网上的设备提供了通信的基础。在网络通信中,TCP/IP协议栈是无处不在的,无论是个人设备的浏览器请求,还是大型分布式系统的内部通信,都依赖于它的稳定、高效与可靠。本文将详细介绍TCP/IP协议的历史、分层模型、核心协议(TCP、IP等),并深入探讨其在网络通信中的重要角色。2.TCP/IP协议简介2.1TCP/IP的历史背景TCP/IP协议由
- Ruby Dir 类和方法详解
froginwe11
开发语言
RubyDir类和方法详解引言在Ruby中,Dir是一个非常有用的类,用于处理文件系统中的目录。它提供了许多方便的方法来列出目录内容、搜索文件、以及处理文件系统的其他相关操作。本文将详细介绍Ruby的Dir类及其常用方法。一、Dir类概述Dir类提供了目录处理的方法,这些方法主要用于读取、搜索、修改文件系统中的目录。通过使用Dir类,可以轻松地完成以下任务:列出目录内容搜索文件处理文件权限等等二、
- 访问DOM元素(节点)
froginwe11
开发语言
DOM(文档对象模型)是Web开发中用于处理HTML和XML文档的标准接口,它允许开发者通过脚本语言(如JavaScript)动态地访问和修改文档的结构、内容和样式。在DOM中,文档的每个部分都被视为一个节点,包括元素、文本、属性等。访问DOM元素(节点)DOM提供了一系列方法来访问和操作元素(节点):getElementById():通过元素的ID获取元素节点。例如,document.getEl
- TCP/IP协议族
dlz0836
网络tcp/ip网络协议
理解常见的网络协议,特别是TCP/IP协议族,对于网络通信的深入学习至关重要。TCP/IP协议族是支撑互联网通信的基础,涉及一系列协议来保证数据在网络上的正确传输。下面,我将对TCP/IP协议的工作原理进行深入浅出的讲解,分为多个部分来解释它的主要协议及其作用。一、TCP/IP协议族概述TCP/IP(TransmissionControlProtocol/InternetProtocol)是一个协
- openwrt配置strongswan对接hillstone ipsec的笔记
d9394952
openwrtopenwrtipsecstrongswan
一、主要参考资料:https://openwrt.org/docs/guide-user/services//ipsec/strongswan/roadwarriorhttps://openwrt.org/docs/guide-user/services//ipsec/strongswan/basichttps://openwrt.org/docs/guide-user/services//ips
- Linux 自旋锁
不悔哥
linux网络tcp/ipc语言智能路由器
当内核发生访问资源冲突的时候,可以有两种锁解决方案:1.原地等待2.挂起当前进程,调度其它进程执行spinklock是内核中提供的一种比较常见的锁机制,自旋锁是“原地等待”的方式解决资源冲突的,即,一个线城获取看一个自旋锁后,另外一个线程期望获取该自旋锁,获取不到,只能够原地“打转”(忙等待)。由于自旋锁的这个忙等待的特性,注定了它的使用场景的限制-------自旋锁不应该被长时间的持有(消耗CP
- Java web 富文本内容生成转为word格式并导出下载
摘星喵Pro
javaweb编程技巧java前端servlet
Javaweb富文本内容生成转为word格式并导出下载最近思路,按标签逐一解析,实现复杂一点但是完美解决问题:https://blog.csdn.net/a2272062968/article/details/126227076思路:Word是完全支持html标签的,但是富文本内容并不是完整的html代码,需要先补全html标签,然后转码输出问题:虽然导出worddoc但是事件内容流还是htm,只
- Vue学习第31天——编程式路由导航5种方法详解及案例练习(与声明式路由导航对比)
离奇6厘米
vue学习javascriptvue
目录一、编程式路由导航1、概念2、理解3、用法二、编程式路由导航的5种方法1、push2、replace3、forward4、back5、go三、案例练习四、编程式路由导航与声明式路由导航对比一、编程式路由导航1、概念除了使用创建a标签来定义导航链接,我们还可以借助router的实例方法,通过编写代码来实现。2、理解不借助实现路由跳转3、用法在vue组件中,可以通过$router访问路由实例,因此
- 【计算机网络】NAT应用
酱学编程
计算机网络计算机网络网络智能路由器
NAT(NetworkAddressTranslation)的定义:NAT(NetworkAddressTranslation)的定义:NAT是一种网络技术,用于在IP数据包通过路由器或防火墙时修改其源IP地址或目的IP地址。主要目的是解决IP地址短缺问题,同时也能为网络提供一定程度的安全保护。NAT的主要功能和作用:地址转换源地址转换****(SNAT):iptables-tnat-APOSTR
- 《Buildozer打包实战指南》第五节 在安卓模拟器和真机上运行apk文件并查看日志
la_vie_est_belle
buildozerpython打包apkpython打包安卓安卓模拟器夜神python
目录5.1在安卓模拟器上运行apk文件并查看日志5.2在真机上运行并查看日志5.3查看apk包内日志成功打包出apk文件并不代表真正成功,只有apk文件成功运行没有报错才算是。在本节,笔者会带大家了解如何将apk文件运行于安卓模拟器和真机上并查看运行日志。5.1在安卓模拟器上运行apk文件并查看日志笔者用的是夜神模拟器,读者可以去官网上下载。安装步骤很简单,笔者这里就不再赘述。安装完毕后打开模拟器
- 自定义数据集使用scikit-learn中的包实现线性回归方法对其进行拟合
灵封~
scikit-learn线性回归python
一、导入必要的库importpandasaspdfromsklearn.model_selectionimporttrain_test_splitfromsklearn.linear_modelimportLinearRegressionfromsklearn.metricsimportmean_squared_error,r2_score二、加载自定义数据集#创建自定义数据集#假设我们有一个简单
- 使用scikit-learn中的KNN包实现对鸢尾花数据集的预测。
灵封~
scikit-learn机器学习人工智能
导入必要的库和数据集#导入鸢尾花数据集fromsklearn.datasetsimportload_iris#数据化可视包importpandasaspdfromsklearn.model_selectionimporttrain_test_splitfromsklearn.preprocessingimportMinMaxScaler,StandardScalerfromsklearn.neig
- vue3底层原理和性能优化
Vue3在底层原理和性能优化方面做了许多改进,以下是一些主要的优化点和原理:虚拟DOM的改进静态树提升:Vue3能够检测到静态组件(即不依赖响应式数据的组件)并将其提升到渲染函数之外,从而减少不必要的重渲染。静态属性提升:对于静态属性,Vue3也会将其提升,避免每次渲染时重新创建这些属性。响应式系统的重构Proxy-based响应式:Vue3使用了ES6的Proxy对象来实现响应式系统,相比Vue
- HTML+CSS初学 (day3)
灵封~
html前端css
HTML,全称为超文本标记语言(HyperTextMarkupLanguage),是一种用于创建网页的标准标记语言。HTML是构建Web页面的基础,它使用一系列称为标签的关键字来定义页面的结构。一、HTML的基本概念定义:HTML通过标签来描述网页中的各个元素,如标题、段落、图片、链接等。这些标签告诉浏览器如何显示内容,包括文字、图片、视频等。作用:定义网页的结构和内容,使网页内容能够按照预定的格
- 编程式路由导航的三种方法
小野晨曦
前端javascript开发语言
什么是编程式路由导航?编程式路由导航其实就是脱离实现路由跳转。//创建一个路由器,并暴露出去//第一步:引入createRouterimport{createRouter,createWebHistory,createWebHashHistory}from'vue-router';//引入一个一个可能要呈现的组件importHomefrom'@/pages/Home.vue'importNewsf
- 赚不到钱的回测都是耍流氓!
金融
小谢是高频交易圈的传奇新秀,他的策略回测报告看得人眼花缭乱:“胜率95%!月收益翻倍!”小谢自信满满,觉得自己就是下一位“交易天才”。可惜,实盘操作两个月后,他的账户余额早已见底。“回测根本没用!”小谢气愤地拍桌子。可事实是,问题并不在回测本身,而在于他的回测逻辑没能反映真实的市场行为。特别是在数字货币这种高波动市场中,tick级别的高频策略回测就像一场“智力游戏”,你不仅要应对海量数据,还得处理
- Java 并发包之线程池和原子计数
lijingyao8206
Java计数ThreadPool并发包java线程池
对于大数据量关联的业务处理逻辑,比较直接的想法就是用JDK提供的并发包去解决多线程情况下的业务数据处理。线程池可以提供很好的管理线程的方式,并且可以提高线程利用率,并发包中的原子计数在多线程的情况下可以让我们避免去写一些同步代码。
这里就先把jdk并发包中的线程池处理器ThreadPoolExecutor 以原子计数类AomicInteger 和倒数计时锁C
- java编程思想 抽象类和接口
百合不是茶
java抽象类接口
接口c++对接口和内部类只有简介的支持,但在java中有队这些类的直接支持
1 ,抽象类 : 如果一个类包含一个或多个抽象方法,该类必须限定为抽象类(否者编译器报错)
抽象方法 : 在方法中仅有声明而没有方法体
package com.wj.Interface;
- [房地产与大数据]房地产数据挖掘系统
comsci
数据挖掘
随着一个关键核心技术的突破,我们已经是独立自主的开发某些先进模块,但是要完全实现,还需要一定的时间...
所以,除了代码工作以外,我们还需要关心一下非技术领域的事件..比如说房地产
&nb
- 数组队列总结
沐刃青蛟
数组队列
数组队列是一种大小可以改变,类型没有定死的类似数组的工具。不过与数组相比,它更具有灵活性。因为它不但不用担心越界问题,而且因为泛型(类似c++中模板的东西)的存在而支持各种类型。
以下是数组队列的功能实现代码:
import List.Student;
public class
- Oracle存储过程无法编译的解决方法
IT独行者
oracle存储过程
今天同事修改Oracle存储过程又导致2个过程无法被编译,流程规范上的东西,Dave 这里不多说,看看怎么解决问题。
1. 查看无效对象
XEZF@xezf(qs-xezf-db1)> select object_name,object_type,status from all_objects where status='IN
- 重装系统之后oracle恢复
文强chu
oracle
前几天正在使用电脑,没有暂停oracle的各种服务。
突然win8.1系统奔溃,无法修复,开机时系统 提示正在搜集错误信息,然后再开机,再提示的无限循环中。
无耐我拿出系统u盘 准备重装系统,没想到竟然无法从u盘引导成功。
晚上到外面早了一家修电脑店,让人家给装了个系统,并且那哥们在我没反应过来的时候,
直接把我的c盘给格式化了 并且清理了注册表,再装系统。
然后的结果就是我的oracl
- python学习二( 一些基础语法)
小桔子
pthon基础语法
紧接着把!昨天没看继续看django 官方教程,学了下python的基本语法 与c类语言还是有些小差别:
1.ptyhon的源文件以UTF-8编码格式
2.
/ 除 结果浮点型
// 除 结果整形
% 除 取余数
* 乘
** 乘方 eg 5**2 结果是5的2次方25
_&
- svn 常用命令
aichenglong
SVN版本回退
1 svn回退版本
1)在window中选择log,根据想要回退的内容,选择revert this version或revert chanages from this version
两者的区别:
revert this version:表示回退到当前版本(该版本后的版本全部作废)
revert chanages from this versio
- 某小公司面试归来
alafqq
面试
先填单子,还要写笔试题,我以时间为急,拒绝了它。。时间宝贵。
老拿这些对付毕业生的东东来吓唬我。。
面试官很刁难,问了几个问题,记录下;
1,包的范围。。。public,private,protect. --悲剧了
2,hashcode方法和equals方法的区别。谁覆盖谁.结果,他说我说反了。
3,最恶心的一道题,抽象类继承抽象类吗?(察,一般它都是被继承的啊)
4,stru
- 动态数组的存储速度比较 集合框架
百合不是茶
集合框架
集合框架:
自定义数据结构(增删改查等)
package 数组;
/**
* 创建动态数组
* @author 百合
*
*/
public class ArrayDemo{
//定义一个数组来存放数据
String[] src = new String[0];
/**
* 增加元素加入容器
* @param s要加入容器
- 用JS实现一个JS对象,对象里有两个属性一个方法
bijian1013
js对象
<html>
<head>
</head>
<body>
用js代码实现一个js对象,对象里有两个属性,一个方法
</body>
<script>
var obj={a:'1234567',b:'bbbbbbbbbb',c:function(x){
- 探索JUnit4扩展:使用Rule
bijian1013
java单元测试JUnitRule
在上一篇文章中,讨论了使用Runner扩展JUnit4的方式,即直接修改Test Runner的实现(BlockJUnit4ClassRunner)。但这种方法显然不便于灵活地添加或删除扩展功能。下面将使用JUnit4.7才开始引入的扩展方式——Rule来实现相同的扩展功能。
1. Rule
&n
- [Gson一]非泛型POJO对象的反序列化
bit1129
POJO
当要将JSON数据串反序列化自身为非泛型的POJO时,使用Gson.fromJson(String, Class)方法。自身为非泛型的POJO的包括两种:
1. POJO对象不包含任何泛型的字段
2. POJO对象包含泛型字段,例如泛型集合或者泛型类
Data类 a.不是泛型类, b.Data中的集合List和Map都是泛型的 c.Data中不包含其它的POJO
- 【Kakfa五】Kafka Producer和Consumer基本使用
bit1129
kafka
0.Kafka服务器的配置
一个Broker,
一个Topic
Topic中只有一个Partition() 1. Producer:
package kafka.examples.producers;
import kafka.producer.KeyedMessage;
import kafka.javaapi.producer.Producer;
impor
- lsyncd实时同步搭建指南——取代rsync+inotify
ronin47
1. 几大实时同步工具比较 1.1 inotify + rsync
最近一直在寻求生产服务服务器上的同步替代方案,原先使用的是 inotify + rsync,但随着文件数量的增大到100W+,目录下的文件列表就达20M,在网络状况不佳或者限速的情况下,变更的文件可能10来个才几M,却因此要发送的文件列表就达20M,严重减低的带宽的使用效率以及同步效率;更为要紧的是,加入inotify
- java-9. 判断整数序列是不是二元查找树的后序遍历结果
bylijinnan
java
public class IsBinTreePostTraverse{
static boolean isBSTPostOrder(int[] a){
if(a==null){
return false;
}
/*1.只有一个结点时,肯定是查找树
*2.只有两个结点时,肯定是查找树。例如{5,6}对应的BST是 6 {6,5}对应的BST是
- MySQL的sum函数返回的类型
bylijinnan
javaspringsqlmysqljdbc
今天项目切换数据库时,出错
访问数据库的代码大概是这样:
String sql = "select sum(number) as sumNumberOfOneDay from tableName";
List<Map> rows = getJdbcTemplate().queryForList(sql);
for (Map row : rows
- java设计模式之单例模式
chicony
java设计模式
在阎宏博士的《JAVA与模式》一书中开头是这样描述单例模式的:
作为对象的创建模式,单例模式确保某一个类只有一个实例,而且自行实例化并向整个系统提供这个实例。这个类称为单例类。 单例模式的结构
单例模式的特点:
单例类只能有一个实例。
单例类必须自己创建自己的唯一实例。
单例类必须给所有其他对象提供这一实例。
饿汉式单例类
publ
- javascript取当月最后一天
ctrain
JavaScript
<!--javascript取当月最后一天-->
<script language=javascript>
var current = new Date();
var year = current.getYear();
var month = current.getMonth();
showMonthLastDay(year, mont
- linux tune2fs命令详解
daizj
linuxtune2fs查看系统文件块信息
一.简介:
tune2fs是调整和查看ext2/ext3文件系统的文件系统参数,Windows下面如果出现意外断电死机情况,下次开机一般都会出现系统自检。Linux系统下面也有文件系统自检,而且是可以通过tune2fs命令,自行定义自检周期及方式。
二.用法:
Usage: tune2fs [-c max_mounts_count] [-e errors_behavior] [-g grou
- 做有中国特色的程序员
dcj3sjt126com
程序员
从出版业说起 网络作品排到靠前的,都不会太难看,一般人不爱看某部作品也是因为不喜欢这个类型,而此人也不会全不喜欢这些网络作品。究其原因,是因为网络作品都是让人先白看的,看的好了才出了头。而纸质作品就不一定了,排行榜靠前的,有好作品,也有垃圾。 许多大牛都是写了博客,后来出了书。这些书也都不次,可能有人让为不好,是因为技术书不像小说,小说在读故事,技术书是在学知识或温习知识,有
- Android:TextView属性大全
dcj3sjt126com
textview
android:autoLink 设置是否当文本为URL链接/email/电话号码/map时,文本显示为可点击的链接。可选值(none/web/email/phone/map/all) android:autoText 如果设置,将自动执行输入值的拼写纠正。此处无效果,在显示输入法并输
- tomcat虚拟目录安装及其配置
eksliang
tomcat配置说明tomca部署web应用tomcat虚拟目录安装
转载请出自出处:http://eksliang.iteye.com/blog/2097184
1.-------------------------------------------tomcat 目录结构
config:存放tomcat的配置文件
temp :存放tomcat跑起来后存放临时文件用的
work : 当第一次访问应用中的jsp
- 浅谈:APP有哪些常被黑客利用的安全漏洞
gg163
APP
首先,说到APP的安全漏洞,身为程序猿的大家应该不陌生;如果抛开安卓自身开源的问题的话,其主要产生的原因就是开发过程中疏忽或者代码不严谨引起的。但这些责任也不能怪在程序猿头上,有时会因为BOSS时间催得紧等很多可观原因。由国内移动应用安全检测团队爱内测(ineice.com)的CTO给我们浅谈关于Android 系统的开源设计以及生态环境。
1. 应用反编译漏洞:APK 包非常容易被反编译成可读
- C#根据网址生成静态页面
hvt
Web.netC#asp.nethovertree
HoverTree开源项目中HoverTreeWeb.HVTPanel的Index.aspx文件是后台管理的首页。包含生成留言板首页,以及显示用户名,退出等功能。根据网址生成页面的方法:
bool CreateHtmlFile(string url, string path)
{
//http://keleyi.com/a/bjae/3d10wfax.htm
stri
- SVG 教程 (一)
天梯梦
svg
SVG 简介
SVG 是使用 XML 来描述二维图形和绘图程序的语言。 学习之前应具备的基础知识:
继续学习之前,你应该对以下内容有基本的了解:
HTML
XML 基础
如果希望首先学习这些内容,请在本站的首页选择相应的教程。 什么是SVG?
SVG 指可伸缩矢量图形 (Scalable Vector Graphics)
SVG 用来定义用于网络的基于矢量
- 一个简单的java栈
luyulong
java数据结构栈
public class MyStack {
private long[] arr;
private int top;
public MyStack() {
arr = new long[10];
top = -1;
}
public MyStack(int maxsize) {
arr = new long[maxsize];
top
- 基础数据结构和算法八:Binary search
sunwinner
AlgorithmBinary search
Binary search needs an ordered array so that it can use array indexing to dramatically reduce the number of compares required for each search, using the classic and venerable binary search algori
- 12个C语言面试题,涉及指针、进程、运算、结构体、函数、内存,看看你能做出几个!
刘星宇
c面试
12个C语言面试题,涉及指针、进程、运算、结构体、函数、内存,看看你能做出几个!
1.gets()函数
问:请找出下面代码里的问题:
#include<stdio.h>
int main(void)
{
char buff[10];
memset(buff,0,sizeof(buff));
- ITeye 7月技术图书有奖试读获奖名单公布
ITeye管理员
活动ITeye试读
ITeye携手人民邮电出版社图灵教育共同举办的7月技术图书有奖试读活动已圆满结束,非常感谢广大用户对本次活动的关注与参与。
7月试读活动回顾:
http://webmaster.iteye.com/blog/2092746
本次技术图书试读活动的优秀奖获奖名单及相应作品如下(优秀文章有很多,但名额有限,没获奖并不代表不优秀):
《Java性能优化权威指南》
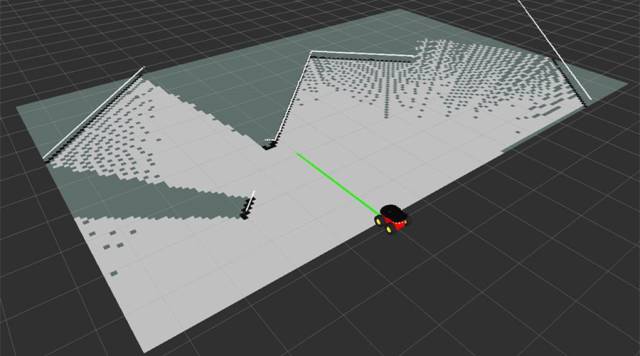 SLAM的英文全程是 Simultaneous Localization and Mapping,中文称作「同时定位与地图创建」。SLAM试图解决这样的问题:一个机器人在未知的环境中运动,如何通过对环境的观测确定自身的运动轨迹,同时构建出环境的地图。SLAM技术正是为了实现这个目标涉及到的诸多技术的总和。
SLAM的英文全程是 Simultaneous Localization and Mapping,中文称作「同时定位与地图创建」。SLAM试图解决这样的问题:一个机器人在未知的环境中运动,如何通过对环境的观测确定自身的运动轨迹,同时构建出环境的地图。SLAM技术正是为了实现这个目标涉及到的诸多技术的总和。

