cache测试及其矩阵优化
利用c/c++测试电脑的cache参数,知识点主要有以下几个:
1. SSE 指令预取
Intel公司的单指令多数据流式扩展(SSE,Streaming SIMD Extensions)技术能够有效增强CPU浮点运算的能力。具体情况请移步维基。
C++中包含SSE指令的头文件:
#include
预取指令:_mm_prefetch
void _mm_prefetch(char *p, int i)
从地址P处预取尺寸为cache line大小的数据缓存,参数i指示预取方式(_MM_HINT_T0, _MM_HINT_T1, _MM_HINT_T2, _MM_HINT_NTA,分别表示不同的预取方式)
T0 预取数据到所有级别的缓存,包括L0。
T1 预取数据到除L0外所有级别的缓存。
T2 预取数据到除L0和L1外所有级别的缓存。
NTA 预取数据到非临时缓冲结构中,可以最小化对缓存的污染。
如果在CPU操作数据之前,我们就已经将数据主动加载到缓存中,那么就减少了由于缓存不命中,需要从内存取数的情况,这样就可以加速操作,获得性能上提升。使用主动缓存技术来优化内存拷贝。
注意,CPU对数据操作拥有绝对自由!使用预取指令只是按我们自己的想法对CPU的数据操作进行补充,有可能CPU当前并不需要我们加载到缓存的数据,这样,我们的预取指令可能会带来相反的结果,比如对于多任务系统,有可能我们冲掉了有用的缓存。不过,在多任务系统上,由于线程或进程的切换所花费的时间相对于预取操作来说太长了, 所以可以忽略线程或进程切换对缓存预取的影响。
参考:MSDN
http://hi.baidu.com/sige_online/blog/item/a80522ceec812433b700c829.html
http://www.codeguru.com/forum/archive/index.php/t-337156.html
http://blog.csdn.net/igame/archive/2007/08/21/1752430.aspx
2. 编译带有SSE指令的程序
需要使用以下选项:
g++ -Wall -march=pentium4 -mmmx -o run.out test.cpp
否则就会出现如下类似错误:
/usr/lib/gcc/i386-redhat-linux/4.1.2/include/xmmintrin.h:34:3: error: #error "SSE instruction set not enabled"
如果是多线程程序,还要加上-lpthread选项
3. 计时函数
3.1 clock()
常量CLOCKS_PER_SEC,它用来表示一秒钟会有多少个时钟计时单元
可以使用公式clock()/CLOCKS_PER_SEC来计算一个进程自身的运行时间,单位为秒
3.2 gettimeofday()
#include
int gettimeofday(struct timeval*tv, struct timezone *tz)
gettimeofday()会把目前的时间用tv结构体返回,当地时区的信息则放到tz所指的结构中
struct timeval{
long tv_sec;/*秒*/
long tv_usec;/*微妙*/
};
struct timezone{
int tz_minuteswest;/*和greenwich 时间差了多少分钟*/
int tz_dsttime;/*type of DST correction*/
};
在gettimeofday()函数中tv或者tz都可以为空。如果为空则就不返回其对应的结构体。
函数执行成功后返回0,失败后返回-1,错误代码存于errno中。
在使用gettimeofday()函数时,第二个参数一般都为空,因为我们一般都只是为了获得当前时间,而不用获得timezone的数值
4. 矩阵优化
1. SSE 指令预取
Intel公司的单指令多数据流式扩展(SSE,Streaming SIMD Extensions)技术能够有效增强CPU浮点运算的能力。具体情况请移步维基。
C++中包含SSE指令的头文件:
#include
预取指令:_mm_prefetch
void _mm_prefetch(char *p, int i)
从地址P处预取尺寸为cache line大小的数据缓存,参数i指示预取方式(_MM_HINT_T0, _MM_HINT_T1, _MM_HINT_T2, _MM_HINT_NTA,分别表示不同的预取方式)
T0 预取数据到所有级别的缓存,包括L0。
T1 预取数据到除L0外所有级别的缓存。
T2 预取数据到除L0和L1外所有级别的缓存。
NTA 预取数据到非临时缓冲结构中,可以最小化对缓存的污染。
如果在CPU操作数据之前,我们就已经将数据主动加载到缓存中,那么就减少了由于缓存不命中,需要从内存取数的情况,这样就可以加速操作,获得性能上提升。使用主动缓存技术来优化内存拷贝。
注意,CPU对数据操作拥有绝对自由!使用预取指令只是按我们自己的想法对CPU的数据操作进行补充,有可能CPU当前并不需要我们加载到缓存的数据,这样,我们的预取指令可能会带来相反的结果,比如对于多任务系统,有可能我们冲掉了有用的缓存。不过,在多任务系统上,由于线程或进程的切换所花费的时间相对于预取操作来说太长了, 所以可以忽略线程或进程切换对缓存预取的影响。
参考:MSDN
http://hi.baidu.com/sige_online/blog/item/a80522ceec812433b700c829.html
http://www.codeguru.com/forum/archive/index.php/t-337156.html
http://blog.csdn.net/igame/archive/2007/08/21/1752430.aspx
2. 编译带有SSE指令的程序
需要使用以下选项:
g++ -Wall -march=pentium4 -mmmx -o run.out test.cpp
否则就会出现如下类似错误:
/usr/lib/gcc/i386-redhat-linux/4.1.2/include/xmmintrin.h:34:3: error: #error "SSE instruction set not enabled"
如果是多线程程序,还要加上-lpthread选项
3. 计时函数
3.1 clock()
#include
常量CLOCKS_PER_SEC,它用来表示一秒钟会有多少个时钟计时单元
可以使用公式clock()/CLOCKS_PER_SEC来计算一个进程自身的运行时间,单位为秒
3.2 gettimeofday()
#include
int gettimeofday(struct timeval*tv, struct timezone *tz)
gettimeofday()会把目前的时间用tv结构体返回,当地时区的信息则放到tz所指的结构中
struct timeval{
long tv_sec;/*秒*/
long tv_usec;/*微妙*/
};
struct timezone{
int tz_minuteswest;/*和greenwich 时间差了多少分钟*/
int tz_dsttime;/*type of DST correction*/
};
在gettimeofday()函数中tv或者tz都可以为空。如果为空则就不返回其对应的结构体。
函数执行成功后返回0,失败后返回-1,错误代码存于errno中。
在使用gettimeofday()函数时,第二个参数一般都为空,因为我们一般都只是为了获得当前时间,而不用获得timezone的数值
4. 矩阵优化
大矩阵的计算时间主要消费在IO访问上,可以利用cache的空间局部性原理,对矩阵的IO进行优化,本文主要是从行列相乘入手,利用转置和分块法进行优化
5. 预取数据程序
/*
* auth = peic
* 预取数据
*/
#include
#include
#include
#include
#define N 1024 * 1024 * 256
#define PREFETCH 2
using namespace std;
int main()
{
int* x = new int[N];
int* y = new int[N];
int i, sum = 0;
double start_time = 0, end_time = 0;
start_time = (double)clock() / CLOCKS_PER_SEC;
for(i = 0; i < N; i+=(PREFETCH/2))
{
sum += (*(x+i)) * (*(y+i));
}
end_time = (double)clock() / CLOCKS_PER_SEC;
cout << "without prefetch, time = " << (end_time - start_time) << "s" << endl;
start_time = (double)clock() / CLOCKS_PER_SEC;
for(i = 0; i < N-PREFETCH; i+=(PREFETCH/2))
{
_mm_prefetch(x+PREFETCH, _MM_HINT_T0);
_mm_prefetch(y+PREFETCH, _MM_HINT_T0);
sum += (*(x+i)) * (*(y+i));
}
end_time = (double)clock() / CLOCKS_PER_SEC;
cout << "* with prefetch, time = " << (end_time - start_time) << "s" << endl;
//system("pause");
return 0;
}
程序运行结果:

6. cache大小测试程序及其结果
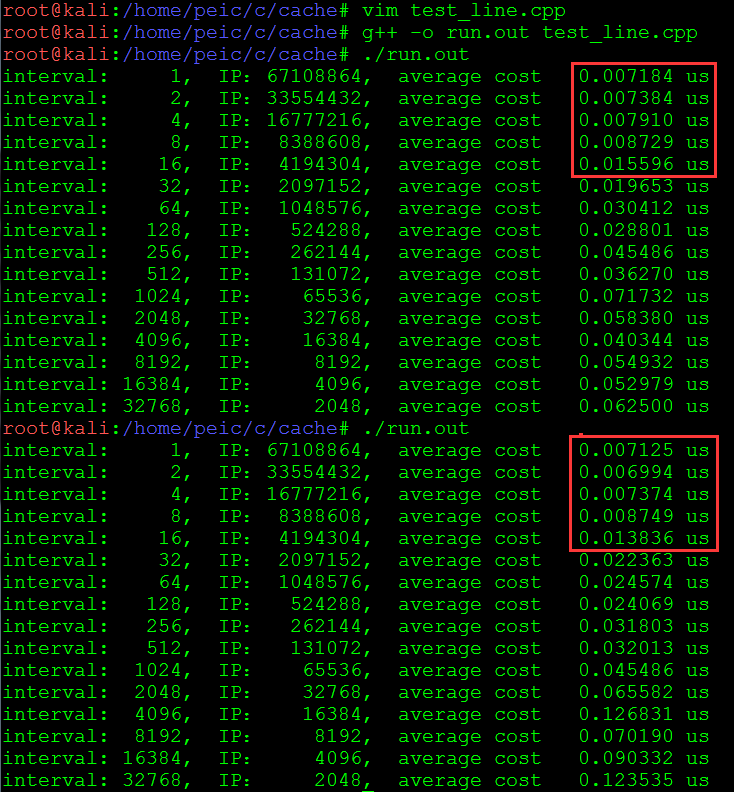
cache行大小测试
/*
* auth = peic
* 测试cache行的大小
*/
#include
#include
#include
#include
#define KB (1024)
#define MB (1024 * 1024)
#define SIZE (64 * MB)
using namespace std;
//定义获取微秒时间的函数
double getTime()
{
struct timeval tv;
gettimeofday(&tv, NULL);
//获取秒
double sec = (double)tv.tv_sec;
//获取微秒
double usec = (double)tv.tv_usec;
//返回微秒数
return sec * 1000000 + usec;
}
//定义遍历数组函数
int traverse(int* array, int len, int interval)
{
for(int i = 0; i < len; i += interval)
{
*(array+i) *= 10;
}
return 1;
}
int main()
{
int *array = (int *)malloc(SIZE * sizeof(int));
double begin_time;
double end_time;
//数组初始化
for(int i = 0; i < SIZE; i++)
{
*(array+i) = i;
}
//使用不同步长遍历数组,输出程序执行时间
for(int interval = 1; interval < 64 * KB; interval *= 2)
{
begin_time = getTime();
traverse(array, SIZE, interval);
end_time = getTime();
//删除步长,指令数,每条指令的花费
printf("interval: %5d, IP:%8d, average cost %10lf us\n", interval, SIZE/interval, (end_time - begin_time) / (SIZE/interval));
}
return 1;
}
程序运行结果(时间发生明显跳变就是cache断行,据此推测cache的行大小,块测试同理):
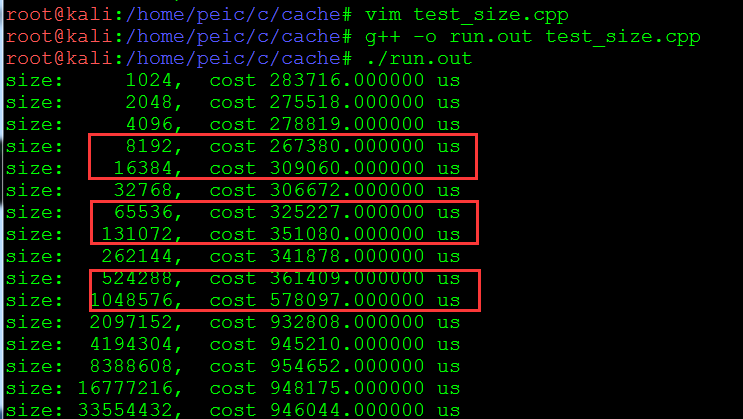
cache块大小测试
/*
* auth = peic
* 测试不同级cache的大小
*/
#include
#include
#include
#include
#define KB (1024)
#define MB (1024 * 1024)
#define SIZE (64 * MB)
using namespace std;
//定义获取微秒时间的函数
double getTime()
{
struct timeval tv;
gettimeofday(&tv, NULL);
//获取秒
double sec = (double)tv.tv_sec;
//获取微秒
double usec = (double)tv.tv_usec;
//返回微秒数
return sec * 1000000 + usec;
}
//定义遍历数组函数
//size为设定的cache块大小
int traverse(int* array, int size)
{
//获得size的二进制的后几位
int len = size - 1;
for(int i = 0; i < SIZE; i++)
{
//cache行的大为16
array[(i*16) & (len)] *= 3;
}
return 1;
}
int main()
{
int *array = (int *)malloc(SIZE * sizeof(int));
double begin_time;
double end_time;
//数组初始化
for(int i = 0; i < SIZE; i++)
{
*(array+i) = i;
}
for(int size = 1024; size < SIZE; size *= 2)
{
/*
if(size == 2*MB/sizeof(int))
{
size = 3*MB / sizeof(int);
}
*/
begin_time = getTime();
traverse(array, size);
end_time = getTime();
//输出不同cache块的花费
printf("size: %8d, cost %10lf us\n", size, (end_time - begin_time));
}
return 1;
}
程序运行结果(3级cache,3级跳变):
7. 矩阵运算优化
普通运算:
/*
* auth = peic
* 直接进行矩阵乘法运算,未做任何优化
*/
#include
#include
#include
#define N 1024
void MartixMultip(int* A, int* B, int* C, int size)
{
int i, j, k;
for(i=0; i < size; i++)
{
for(j=0; j
转置后再计算
/*
* auth = peic
* 对矩阵乘法进行优化, 对矩阵进行转置
*/
#include
#include
#include
#define N 1024
void MartixMultip(int* A, int* B, int* C, int size)
{
int i, j, k;
//先对矩阵进行转置
int *tmp = (int *)malloc(sizeof(int) * size * size);
for(i=0; i
分块运算
/*
* auth = peic
* 矩阵乘法优化,对矩阵进行分块
*/
#include
#include
#include
#define N 1024
int min(int a, int b)
{
return a < b ? a : b;
}
void MartixMultip(int* A, int* B, int* C, int size, int block)
{
int i, j, k;
//先循环分块
for(int ii=0; ii < size; ii += block)
{
for(int jj=0; jj
运算结果:


从结果上看,转置的优化很明显。分块依赖于矩阵的规模和分块规模的选择,因为分块带来中间的消耗,需要寻找最佳的分块方案。
举这些例子只是想表明,有时候,很简单的一些方法就能极大的提高程序的运行效率。