唐宇迪tensorflow学习笔记之项目实战(对抗生成网络)
对抗生成网络有两个重要概念
- 生成器:火眼金睛,分辨出生和真实的
- 判别器:瞒天过海,骗过判别器
- 损失函数定义:一方面要让判别器分辨能力更强,另一方面要让生成器更真。
网络架构
输入层:待生成图像和(噪音)和真实数据
生成网络:将噪音图像进行生成
判断网络:
- (1)判断真实图像输出结果
- (2)判断生成图像输出结果
目标函数:
- (1)对于生成网络要使得生成结果通过判别网络为真
- (2)对于判断网络要使得输入为真实图像时判别为真输入为生成图像时判别为假。
判别模型:
log(D1(x))+log(1−D2(G(z)))
生成模型:
log(D2(G(z)))
上述为一个最基本的生成网络。下面是生成网络的一个升级版本。
DCGAN的特点:
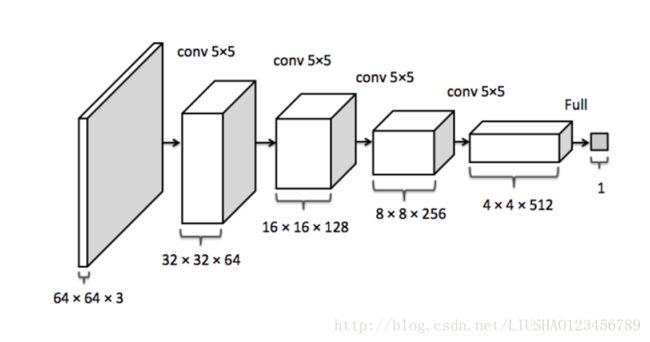
判别模型:使用带步长的卷积(strided convolutions)取代了的空间池化(spatial pooling),容许网络学习自己的空间下采样(spatial downsampling)。
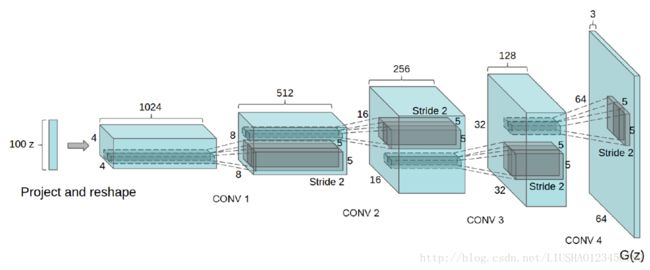
生成模型:使用微步幅卷积(fractional strided),容许它学习自己的空间上采样(spatial upsampling)。
激活函数: LeakyReLU
Batch Normalization 批标准化:解决因糟糕的初始化引起的训练问题,使得梯度能传播更深层次。 Batch Normalization证明了生成模型初始化的重要性,避免生成模型崩溃:生成的所有样本都在一个点上(样本相同),这是训练GANs经常遇到的失败现象。
生成器
判别器
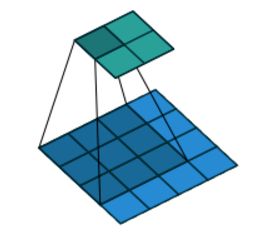
反卷积
- 就是把卷积的前向传播和反向传播完全颠倒
文件下载链接:
源代码如下:
dcgan.py
import numpy as np
import tensorflow as tf
import pickle
import matplotlib.pyplot as plt
# %matplotlib inline
import input_data
mnist = input_data.read_data_sets('data/')
def get_inputs(noise_dim, image_height, image_width, image_depth):
inputs_real = tf.placeholder(tf.float32, [None, image_height, image_width, image_depth], name='inputs_real')
inputs_noise = tf.placeholder(tf.float32, [None, noise_dim], name='inputs_noise')
return inputs_real, inputs_noise
def get_generator(noise_img, output_dim, is_train=True, alpha=0.01):
with tf.variable_scope("generator", reuse=(not is_train)):
# 100 x 1 to 4 x 4 x 512
# 全连接层
layer1 = tf.layers.dense(noise_img, 4 * 4 * 512)
layer1 = tf.reshape(layer1, [-1, 4, 4, 512])
# batch normalization
layer1 = tf.layers.batch_normalization(layer1, training=is_train)
# Leaky ReLU
layer1 = tf.maximum(alpha * layer1, layer1)
# dropout
layer1 = tf.nn.dropout(layer1, keep_prob=0.8)
# 4 x 4 x 512 to 7 x 7 x 256
layer2 = tf.layers.conv2d_transpose(layer1, 256, 4, strides=1, padding='valid')
layer2 = tf.layers.batch_normalization(layer2, training=is_train)
layer2 = tf.maximum(alpha * layer2, layer2)
layer2 = tf.nn.dropout(layer2, keep_prob=0.8)
# 7 x 7 256 to 14 x 14 x 128
layer3 = tf.layers.conv2d_transpose(layer2, 128, 3, strides=2, padding='same')
layer3 = tf.layers.batch_normalization(layer3, training=is_train)
layer3 = tf.maximum(alpha * layer3, layer3)
layer3 = tf.nn.dropout(layer3, keep_prob=0.8)
# 14 x 14 x 128 to 28 x 28 x 1
logits = tf.layers.conv2d_transpose(layer3, output_dim, 3, strides=2, padding='same')
# MNIST原始数据集的像素范围在0-1,这里的生成图片范围为(-1,1)
# 因此在训练时,记住要把MNIST像素范围进行resize
outputs = tf.tanh(logits)
return outputs
def get_discriminator(inputs_img, reuse=False, alpha=0.01):
with tf.variable_scope("discriminator", reuse=reuse):
# 28 x 28 x 1 to 14 x 14 x 128
# 第一层不加入BN
layer1 = tf.layers.conv2d(inputs_img, 128, 3, strides=2, padding='same')
layer1 = tf.maximum(alpha * layer1, layer1)
layer1 = tf.nn.dropout(layer1, keep_prob=0.8)
# 14 x 14 x 128 to 7 x 7 x 256
layer2 = tf.layers.conv2d(layer1, 256, 3, strides=2, padding='same')
layer2 = tf.layers.batch_normalization(layer2, training=True)
layer2 = tf.maximum(alpha * layer2, layer2)
layer2 = tf.nn.dropout(layer2, keep_prob=0.8)
# 7 x 7 x 256 to 4 x 4 x 512
layer3 = tf.layers.conv2d(layer2, 512, 3, strides=2, padding='same')
layer3 = tf.layers.batch_normalization(layer3, training=True)
layer3 = tf.maximum(alpha * layer3, layer3)
layer3 = tf.nn.dropout(layer3, keep_prob=0.8)
# 4 x 4 x 512 to 4*4*512 x 1
flatten = tf.reshape(layer3, (-1, 4 * 4 * 512))
logits = tf.layers.dense(flatten, 1)
outputs = tf.sigmoid(logits)
return logits, outputs
def get_loss(inputs_real, inputs_noise, image_depth, smooth=0.1):
g_outputs = get_generator(inputs_noise, image_depth, is_train=True)
d_logits_real, d_outputs_real = get_discriminator(inputs_real)
d_logits_fake, d_outputs_fake = get_discriminator(g_outputs, reuse=True)
# 计算Loss
g_loss = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_fake,
labels=tf.ones_like(d_outputs_fake) * (1 - smooth)))
d_loss_real = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_real,
labels=tf.ones_like(d_outputs_real) * (
1 - smooth)))
d_loss_fake = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_fake,
labels=tf.zeros_like(d_outputs_fake)))
d_loss = tf.add(d_loss_real, d_loss_fake)
return g_loss, d_loss
def get_optimizer(g_loss, d_loss, beta1=0.4, learning_rate=0.001):
train_vars = tf.trainable_variables()
g_vars = [var for var in train_vars if var.name.startswith("generator")]
d_vars = [var for var in train_vars if var.name.startswith("discriminator")]
# Optimizer
with tf.control_dependencies(tf.get_collection(tf.GraphKeys.UPDATE_OPS)):
g_opt = tf.train.AdamOptimizer(learning_rate).minimize(g_loss, var_list=g_vars)
d_opt = tf.train.AdamOptimizer(learning_rate).minimize(d_loss, var_list=d_vars)
return g_opt, d_opt
def plot_images(samples):
fig, axes = plt.subplots(nrows=1, ncols=25, sharex=True, sharey=True, figsize=(50,2))
for img, ax in zip(samples, axes):
ax.imshow(img.reshape((28, 28)), cmap='Greys_r')
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
fig.tight_layout(pad=0)
def show_generator_output(sess, n_images, inputs_noise, output_dim):
cmap = 'Greys_r'
noise_shape = inputs_noise.get_shape().as_list()[-1]
# 生成噪声图片
examples_noise = np.random.uniform(-1, 1, size=[n_images, noise_shape])
samples = sess.run(get_generator(inputs_noise, output_dim, False),
feed_dict={inputs_noise: examples_noise})
result = np.squeeze(samples, -1)
return result
# 定义参数
batch_size = 64
noise_size = 100
epochs = 5
n_samples = 25
learning_rate = 0.001
beta1=0.4
def train(noise_size, data_shape, batch_size, n_samples):
# 存储loss
losses = []
steps = 0
inputs_real, inputs_noise = get_inputs(noise_size, data_shape[1], data_shape[2], data_shape[3])
g_loss, d_loss = get_loss(inputs_real, inputs_noise, data_shape[-1])
g_train_opt, d_train_opt = get_optimizer(g_loss, d_loss, beta1, learning_rate)
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
# 迭代epoch
for e in range(epochs):
for batch_i in range(mnist.train.num_examples // batch_size):
steps += 1
batch = mnist.train.next_batch(batch_size)
batch_images = batch[0].reshape((batch_size, data_shape[1], data_shape[2], data_shape[3]))
# scale to -1, 1
batch_images = batch_images * 2 - 1
# noise
batch_noise = np.random.uniform(-1, 1, size=(batch_size, noise_size))
# run optimizer
_ = sess.run(g_train_opt, feed_dict={inputs_real: batch_images,
inputs_noise: batch_noise})
_ = sess.run(d_train_opt, feed_dict={inputs_real: batch_images,
inputs_noise: batch_noise})
if steps % 101 == 0:
train_loss_d = d_loss.eval({inputs_real: batch_images,
inputs_noise: batch_noise})
train_loss_g = g_loss.eval({inputs_real: batch_images,
inputs_noise: batch_noise})
losses.append((train_loss_d, train_loss_g))
# 显示图片
samples = show_generator_output(sess, n_samples, inputs_noise, data_shape[-1])
plot_images(samples)
print("Epoch {}/{}....".format(e + 1, epochs),
"Discriminator Loss: {:.4f}....".format(train_loss_d),
"Generator Loss: {:.4f}....".format(train_loss_g))
with tf.Graph().as_default():
train(noise_size, [-1, 28, 28, 1], batch_size, n_samples)