单片机差分GPS定位系统设计
背景意义
随着GPS定位的不断发展和普及,用户对GPS定位精度的要求越来越高,单点的GPS定位精度在水平方向上只能达到几十米的精度。在实际应用中往往不能满足要求。差分GPS定位技术可以使定位精度达到米级甚至更高精度。购买现成的差分GPS设备可以直接进行定位,但价格昂贵。利用普通的 GPS接收机和单片机建立单片机差分GPS定位系统可以有效提高定位精度,且具有设备简单 、造价低及使用灵活的特点,有重要的实际应用意义。
项目视频
技术路线
设计方案
单片机差分GPS定位系统的结构由参考站、数据通信模块和移动站三个部分组成。由事先经过精确测量定位的参考站,计算卫星测量中缓慢变化的各种误差分量,形成对可见卫星的测量修正值,再通过数据通信传给附近的移动站,从而构成差分定位,提高GPS定位精度。

模块选取
为实现系统功能,我们本着性能稳定,成本较低的原则对几个重要的模块进行了选取。


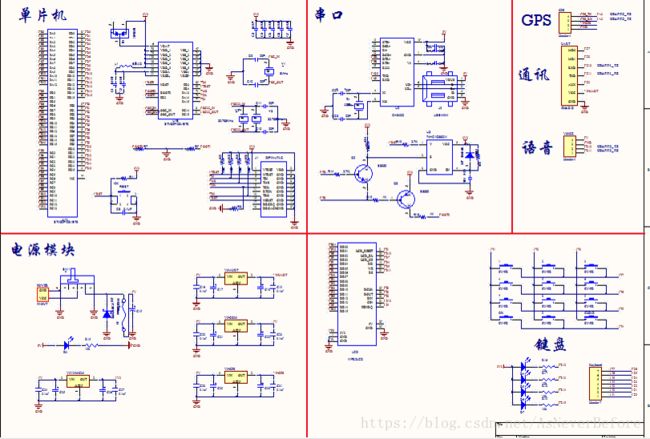
硬件设计
核心控制板电路
原理图绘制
PCB布线


焊接电路板

核心控制板实物
移动站包装
为便于用户使用提高美观性我们将移动站进行了包装,其外部包含LCD显示屏,薄膜按键,状态指示灯,JATG下载接口,天线外接接口。

软件实现
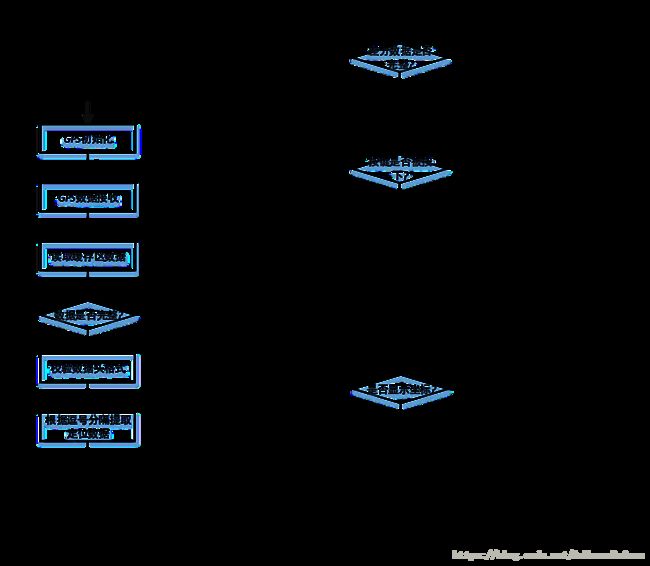
参考站程序
参考站的主要作用是提供卫星偏差数据给移动站。
(1)GPS信息解码
(2)差分数据计算、发送
(3)位置信息的显示

GPS解码
$GPGGA,124105.00,3853.16302,N,11530.23581,E,1,05,1.37,59.3,M,-10.9,M,,*45
$GPGSA,A,3,09,17,23,28,12,,,,,,,,1.90,1.37,1.31*0B
$GPGSV,4,1,14,01,02,065,,02,21,260,,03,33,049,,06,63,286,*7D
$GPGLL,3853.16302,N,11530.23581,E,124105.00,A,A*6A
在$GPGGA语句中就包含了我们所需要的经度、纬度、高度等信息。 为减轻单片机接收数据压力,我们可以通过U-blox公司的官方软件u-center对GPS的波特率,输出数据内容,输出数据频率进行修改。

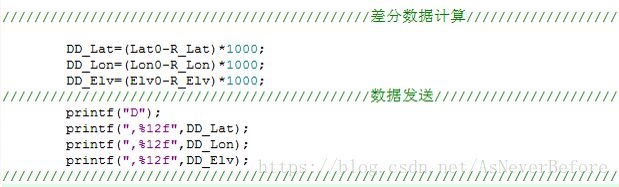
差分数据计算和发送
差分数据包含经度、纬度和海拔高度三个分量。均为双精度浮点型变量,为保障其传输精度,我们将差分数据乘1000打印为字符串并增加校验位进行传输。
移动站程序
移动站是整个系统的功能站。
(1)GPS信息解码
(2)差分数据接收,定位信息修正
(3)位置信息的显示(经纬度方式,坐标轨迹方式)
(4)语音播报
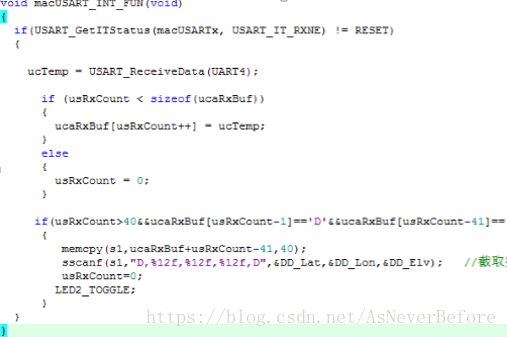
差分数据接收定位
信息修正差分数据的接收在串口终端中。

语音播报
语音模块通过串口发送命令的方式触发。发送格式为7E FF 06 03 00 00 xx EF。其中xx为需要播报的语音段,按拷贝顺序依次排列。

在时间播报和经度纬度海拔高度上都含有大量的浮点型数字。因此有必要编写一个通用的转换程序,将字符一位位转换为对应的语音地址,但在转换过程中又要考虑到个十百千万的单位添加,中间连续零,末尾零等问题,避免出现“零百”、“零零”等现象。
性能测试
移动站功能测试
移动站主要功能有:
(1)差分定位功能
(2)经纬度显示和直角坐标显示
(3)语音播报
(4)轨迹记录
(5)测距功能


移动站定位精度测试
采用实验室高精度GPS定位板卡BDM683三系统八频高精度 OEM 板卡进行参考站准确坐标的确定。其单点定位精度可达:平面1.5m,高程3.0m,RTK定位精度为:平面10mm+1ppm,高程15mm+1ppm。


将移动站分别放置到实现确定好的5个基准点,使用串口将移动站单点定位和差分定位的数据发送电脑,进行记录。为保障测试的有效性,每个点记录约10分钟。
D, 38.875495, 115.497905, 36.500000, 38.875762, 115.497553, 32.993300, 32.330055D, 38.875495, 115.497905, 36.500000, 38.875762, 115.497553, 32.993300, 32.330055D, 38.875495, 115.497905, 36.500000, 38.875762, 115.497553, 32.993300, 32.330055D, 38.875495, 115.497905, 36.600000, 38.875762, 115.497553, 33.093300, 32.330055D, 38.875495,, 

以第一个定位点为例:
原始数据提取。
利用MATLAB将1.TXT中的原始数据进行分析和提取,得到单点定位和差分定位的经度、纬度、高度数据

误差分析。
水平误差 水平误差即测量出的坐标值与准确值的水平间距。利用MATLAB中自带的distance函数可以很方便的求出。
例如:errorx1(i)=distance(R(1),R(2),lat(i),lon(i),6378137);
垂直误差 垂直误差即为在海拔高度上测量值与准确值的差值。
测试点1的水平误差和垂直误差


5个测试点的定位水平误差(保留两位小数)

5个测试点的定位垂直误差(保留两位小数)

设计的的单片机差分GPS定位系统
在水平方向定位误差从平均43米,缩减到平均1.5米左右,提升了96%的精度。
在垂直方向上,虽然没有水平方向上提升那么明显,但是也从9米左右提高到2.3米左右,提升定位精度73%。
在成本较低的前提下实现了定位精度数量级的提升,满足系统的设计要求。
工作总结:
本文针对当前对于GPS定位对于在低成本条件下实现高精度定位的需求,设计了单片机差分GPS系统。经过方案设计,模块选取,硬件制作,软件编写调试等一系列过程将系统设计完成并实现了基本功能,测试结果表明,系统的定位精度满足要求。实现了水平方向1.5m垂直方向2.3m的定位精度。
创新特色
1、利用单片机和GPS组成差分定位系统,在一定程度上提高了定位精度。
2、体积小巧、携带方便、造价低廉。
3、配备语音LCD显示屏按键等人机交互模块,功能多,使用十分方便。
4、预留外接串口,方便作为拓展模块配合其他系统使用。