LSTM+CRF介绍
LSTM和CRF要解决问题的:序列标注问题(中文分词、词性识别、命名实体识别、机器翻译等)
本文先介绍LSTM的基本结构,再介绍LSTM与CRF结合的方法(CRF的具体算法介绍不包括在本文中)。
LSTM是RNN的一种特殊形式,首先看一下RNN单元的基本结构定义: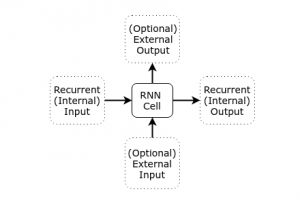
简单解释一下,RNN其实是希望能模拟人类大脑处理信息的方式,人类的大脑所接收的信号可以分为外部(即我们的感知,视觉、听觉等)和内部(脑海中已经存在的想法),在不同的时刻,大脑会使人产生新的行动(external output)和新的想法(internal output)。RNN网络其实是一组前向网络的组合,每个单元代表一个时间点,每个RNN单元(也有人叫细胞)有两种输入输出,分别代表RNN网络自身的输入输出,以及应对外部刺激的输入输出(可以看作是希望传递到下一时刻的状态)。按照这里提出的通用结构,理论上来说RNN可以完美的模拟人的大脑,但是实际训练起来并不是那么简单。主要问题大家都知道:RNN训练通常伴随着梯度衰退缓慢和梯度爆炸增长现象。LSTM正是为了解决这一问题而提出的。
LSTM设计的初衷是为了确保现实世界中信息的完整性,引入一个memory cell,即对历史信息进行记录,并且这个记录是有控制有选择的。由此引入了三个控制门的概念。这三个控制门分别控制LSTM单元应该写入什么、读取什么、输出什么。
我们可以先看一下LSTM的原型结构:
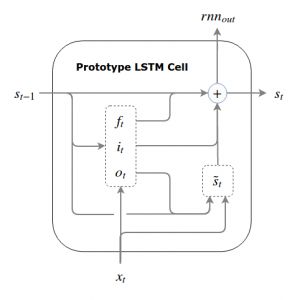
其中,三个控制门的定义如下:
i t =σ(W i s t−1 +U i x t +b i ) it=σ(Wist−1+Uixt+bi)
o t =σ(W o s t−1 +U o x t +b o ) ot=σ(Wost−1+Uoxt+bo)
f t =σ(W f s t−1 +U f x t +b f ) ft=σ(Wfst−1+Ufxt+bf)
s t ~ =ϕ(W(o t ⊙s t−1 )+Ux t +b) st~=ϕ(W(ot⊙st−1)+Uxt+b)
s t =f t ⊙s t−1 +i t ⊙s t ~ st=ft⊙st−1+it⊙st~
这里跟最开始的RNN模型进行对比,可以发现, s t−1 st−1 是内部输入,可以看做是前一时刻的状态, x t xt 是当前输入,前一状态和当前输出决定了门的控制方式,进而通过三个控制门去控制输出 rnn out rnnout 和更新当前状态 s t st 。
但是这个原型有个很明显的问题,就是状态值 s t st 是无界的,在训练刚开始的时候,由于各项权重值都是随机初始化的,并且 o t ot 和 f t ft 是无关的,导致状态值很容易变得很大并且是杂乱的,使得门和输出候选集合都会很容易饱和,因而需要给状态值加上限制范围。有很多LSTM的变体可以克服这个问题,最简单的通过归一化可以实现,另外GRU(Gated Recurrent Unit)结构也可以避免这个问题,或者是引入非线性变换的方法。
很多人会把GRU看作是LSTM的一个简化,因为它将写入门和记忆门进行了关联,最终相当于只使用了两个门,在GRU结构中被称作update gate和reset gate。
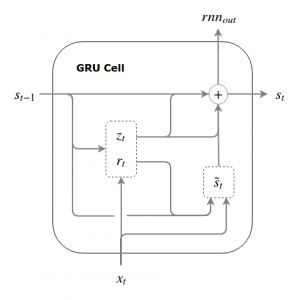
这两个门的定义如下:
r t =σ(W r s t−1 +U r x t +b r ) rt=σ(Wrst−1+Urxt+br)
z t =σ(W z s t−1 +U z x t +b z ) zt=σ(Wzst−1+Uzxt+bz)
s t ~ =ϕ(W(r t ⊙s t−1 )+Ux t +b) st~=ϕ(W(rt⊙st−1)+Uxt+b)
s t =z t ⊙s t−1 +(1−z t )⊙s t ~ st=zt⊙st−1+(1−zt)⊙st~
这里相当于把写入门和记忆门认为是负相关的,这样就能尽可能稳定状态值。
引入非线性变换的方法,我们这里定义为伪LSTM结构,即对状态值进行sigmod或tanh等类型的非线性变换,使用变换后的值来更新控制门和候选输出,最终的rnn输出也使用变换后的,但是要注意,在更新状态值的时候,仍然使用变换前的状态值,这同样可以达到限制状态值范围的作用。
伪LSTM的单元结构如下:
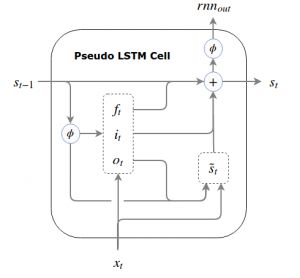
对应公式如下:
i t =σ(W i (ϕ(s t−1 ))+U i x t +b i ) it=σ(Wi(ϕ(st−1))+Uixt+bi)
o t =σ(W o (ϕ(s t−1 ))+U o x t +b o ) ot=σ(Wo(ϕ(st−1))+Uoxt+bo)
f t =σ(W f (ϕ(s t−1 ))+U f x t +b f ) ft=σ(Wf(ϕ(st−1))+Ufxt+bf)
s t ~ =ϕ(W(o t ⊙ϕ(s t−1 ))+Ux t +b) st~=ϕ(W(ot⊙ϕ(st−1))+Uxt+b)
s t =f t ⊙s t−1 +i t ⊙s t ~ st=ft⊙st−1+it⊙st~
rnn out =ϕ(s t ) rnnout=ϕ(st)
伪LSTM和通常定义的基本LSTM的区别主要有三个:
1.LSTM是在写入之后才读取,这样迫使LSTM网络中各单元之间需要有隐藏层;
2.在计算控制门的时候,使用的是门控隐状态 h t−1 =o t−1 ⊙ϕ(c t−1 ) ht−1=ot−1⊙ϕ(ct−1) ,而不是非线性变换后的主状态 ϕ(c t−1 ) ϕ(ct−1)
3.LSTM的外部输出是门控隐状态 h t =o t ⊙ϕ(c t ) ht=ot⊙ϕ(ct) ,而不是非线性变换后的主状态 ϕ(c t ) ϕ(ct) 故而基本的LSTM单元结构如下:
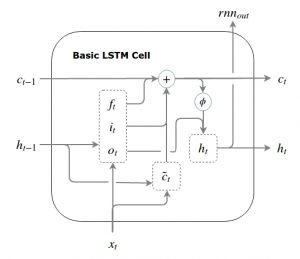
i t =σ(W i h t−1 +U i x t +b i ) it=σ(Wiht−1+Uixt+bi)
o t =σ(W o h t−1 +U o x t +b o ) ot=σ(Woht−1+Uoxt+bo)
f t =σ(W f h t−1 +U f x t +b f ) ft=σ(Wfht−1+Ufxt+bf)
c t ~ =ϕ(Wh t−1 +Ux t +b) ct~=ϕ(Wht−1+Uxt+b)
c t =f t ⊙c t−1 +i t ⊙c t ~ ct=ft⊙ct−1+it⊙ct~
h t =o t ⊙ϕ(c t ) ht=ot⊙ϕ(ct)
rnn out =h t rnnout=ht
还有一种LSTM的变体,也是目前比较常用的结构,即LSTM with peepholes,在控制门中也引入前一时刻的状态,如下:
i t =σ(W i h t−1 +U i x t +P i c t−1 +b i ) it=σ(Wiht−1+Uixt+Pict−1+bi)
f t =σ(W f h t−1 +U f x t +P f c t−1 +b f ) ft=σ(Wfht−1+Ufxt+Pfct−1+bf)
c t ~ =ϕ(Wh t−1 +Ux t +b) ct~=ϕ(Wht−1+Uxt+b)
c t =f t ⊙c t−1 +i t ⊙c t ~ ct=ft⊙ct−1+it⊙ct~
o t =σ(W o h t−1 +U o x t +P o c t +b o ) ot=σ(Woht−1+Uoxt+Poct+bo)
h t =o t ⊙ϕ(c t ) ht=ot⊙ϕ(ct)
rnn out =h t rnnout=ht
上述介绍了LSTM单元结构,LSTM网络是多个LSTM单元结构的组合,目前常用的双向LSTM网络通常通过是使用两层LSTM,在反向层将输入反向实现的。
通过LSTM网络的处理,相当于得到了一个比较好的对输入数据的表示方法,LSTM单元最终输出的向量即可以看成是输入数据的一种表示形式,最终在打标签阶段,一般都采用softmax进行处理,不过这种方法在处理输出标签直接有强烈关系的数据时,效果还是有限的。特别是在实际的序列标注任务时,由于神经网络结构对数据的依赖很大,数据量的大小和质量也会严重影响模型训练的效果,故而出现了将现有的线性统计模型与神经网络结构相结合的方法,效果较好的有LSTM与CRF的结合。简单来说就是在输出端将softmax与CRF结合起来,使用LSTM解决提取序列特征的问题,使用CRF有效利用了句子级别的标记信息。
如下是用于实体识别的LSTM+CRF模型结构:
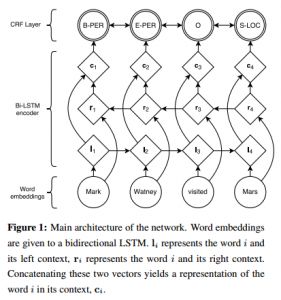
在LSTM+CRF模型下,输出的将不再是相互独立的标签,而是最佳的标签序列。
对于输入: X=(x 1 ,x 2 ,...,x n ) X=(x1,x2,...,xn) ,
我们可以定义LSTM的输出概率矩阵 P n∗k Pn∗k 其中k是输出标签的个数。 P i,j Pi,j 是指第i个字被标记为第j个标签的概率。对于待预测的标签序列: y=(y 1 ,y 2 ,...,y n ) y=(y1,y2,...,yn) ,
我们可以有如下定义:
s(X,y)=∑ n i=0 A y i ,y i+1 +∑ n i=0 P i,y i s(X,y)=∑i=0nAyi,yi+1+∑i=0nPi,yi
其中A是状态转移矩阵, A i,j Ai,j 代表从第i个tag转移到第j个tag的概率。
通过求得最大的 s(X,y) s(X,y) ,即可得到最佳的输出标签序列。这里引入的CRF,其实只是对输出标签二元组进行了建模,然后使用动态规划进行计算即可,最终根据得到的最优路径进行标注。
参考文献:
1.http://r2rt.com/written-memories-understanding-deriving-and-extending-the-lstm.html
2.Bidirectional LSTM-CRF Models for Sequence Tagging(https://arxiv.org/abs/1508.01991)
3.Neural Architectures for Named Entity Recognition(https://arxiv.org/abs/1603.01360)
4.http://www.jianshu.com/p/9dc9f41f0b29