稀疏光流
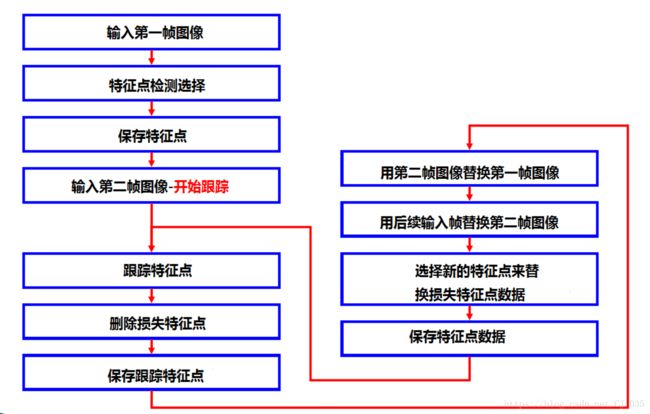
实现流程:
代码&注释:
#include
#include
using namespace cv;
using namespace std;
Mat frame, gray;
Mat prev_frame, prev_gray;
vector features; // shi-tomasi角点检测 - 特征数据
vector iniPoints; // 初始化特征数据
vector fpts[2]; // 保持当前帧和前一帧的特征点位置
vector status; // 特征点跟踪成功标志位
vector errors; // 跟踪时候区域误差和
void drawFeature(Mat &inFrame);
void detectFeatures(Mat &inFrame, Mat &ingray);
void klTrackFeature();
void drawTrackLines();
int main(int argc, char** argv) {
//VideoCapture capture(0);
VideoCapture capture;
capture.open("bike.avi");
if (!capture.isOpened()) {
printf("could not load video file...\n");
return -1;
}
namedWindow("camera input", 0);
while (capture.read(frame)) {
// flip(frame, frame, 1);
cvtColor(frame, gray, COLOR_BGR2GRAY);
if (fpts[0].size() < 40) {
detectFeatures(frame, gray);
fpts[0].insert(fpts[0].end(), features.begin(), features.end());
iniPoints.insert(iniPoints.end(), features.begin(), features.end());
}
else {
printf("没有检测,持续追踪...\n");
}
if (prev_gray.empty()) {
gray.copyTo(prev_gray);
}
klTrackFeature();
// 更新前一帧数据
gray.copyTo(prev_gray);
frame.copyTo(prev_frame);
imshow("camera input", frame);
char c = waitKey(50);
if (c == 27) {
break;
}
}
waitKey(0);
return 0;
}
void detectFeatures(Mat &inFrame, Mat &ingray) {
double maxCorners = 5000;
double qualitylevel = 0.01;
double minDistance = 10;
double blockSize = 3;
double k = 0.04;
goodFeaturesToTrack(ingray, features, maxCorners, qualitylevel, minDistance, Mat(), blockSize, false, k);
cout << "detect features : " << features.size() << endl;
}
void klTrackFeature() {
// KLT
calcOpticalFlowPyrLK(prev_gray, gray, fpts[0], fpts[1], status, errors);
int k = 0;
// 特征点过滤
for (int i = 0; i < fpts[1].size(); i++) {
double dist = abs(fpts[0][i].x - fpts[1][i].x) + abs(fpts[0][i].y - fpts[1][i].y);
/*
1.calcOpticalFlowPyrLK函数作用是对输入的特征点fpts[0],根据下一帧的图像对这些特征点判定是不是光流,
检测结束后,status的每个下标会保存答案,再进行判断即可。
2.initPoints集合用于存放初始化特征数据,每次的calcOpticalFlowPyrLK后都会重新更新一次,用status判断判断有没有新的特征是可以追踪的,或者用status判断哪些旧的特征可以不要了,
3.fpts[1]集合用于存放当前帧的数据,
*/
if (dist > 2 && status[i]) {
iniPoints[k] = iniPoints[i];
fpts[1][k++] = fpts[1][i];
//1.将用KLT算法找到的特征点集fpts[1]进行筛选,将没用的点去除,
//没用的点包括距离太小没有变化和status的状态
//2.将有用的点放进fpts[1]中
}
}
// 保存特征点并绘制跟踪轨迹
iniPoints.resize(k); //裁剪不要的特征,更新集合大小
fpts[1].resize(k);
drawTrackLines();
std::swap(fpts[1], fpts[0]);//更新帧的特征点
}
void drawTrackLines() {
for (size_t t = 0; t
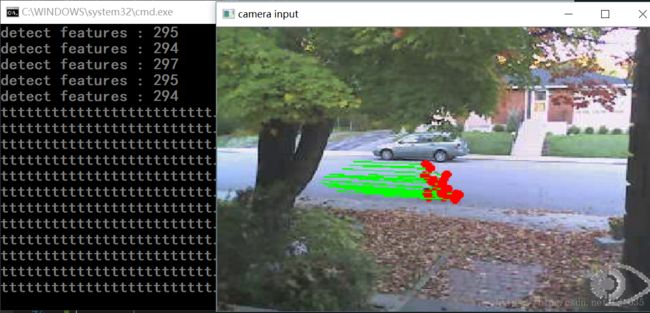
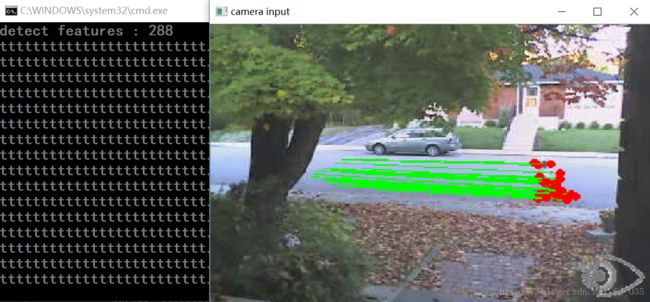
效果图:
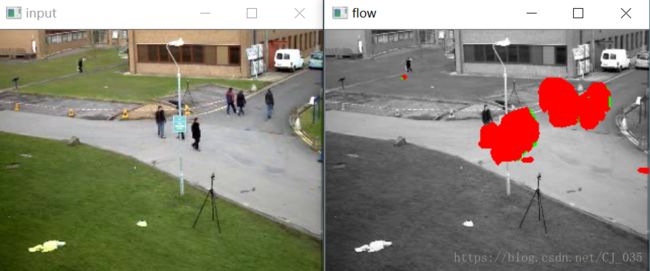
稠密光流
代码:
#include "opencv2/opencv.hpp"
#include
#include
using namespace cv;
using namespace std;
void drawOpticalFlowHF(const Mat &flowdata, Mat& image, int step);
int main(int argc, char** argv)
{
VideoCapture capture;
capture.open("video_003.avi");
if (!capture.isOpened()) {
printf("could not load image...\n");
return -1;
}
Mat frame, gray;
Mat prev_frame, prev_gray;
Mat flowResult, flowdata;
capture.read(frame);
cvtColor(frame, prev_gray, COLOR_BGR2GRAY);
namedWindow("flow", CV_WINDOW_AUTOSIZE);
namedWindow("input", CV_WINDOW_AUTOSIZE);
// 从第二帧数据开始
while (capture.read(frame))
{
cvtColor(frame, gray, COLOR_BGR2GRAY);
if (!prev_gray.empty()) {
calcOpticalFlowFarneback(prev_gray, gray, flowdata, 0.5, 3, 15, 3, 5, 1.2, 0);
cvtColor(prev_gray, flowResult, COLOR_GRAY2BGR);
drawOpticalFlowHF(flowdata, flowResult, 10);
gray.copyTo(prev_gray);
imshow("flow", flowResult);
imshow("input", frame);
}
char c = waitKey(1);
if (c == 27) {
break;
}
}
return 0;
}
void drawOpticalFlowHF(const Mat &flowdata, Mat& image, int step) {
for (int row = 0; row < image.rows; row++) {
for (int col = 0; col < image.cols; col++) {
const Point2f fxy = flowdata.at(row, col);
if (fxy.x > 1 || fxy.y > 1) {
line(image, Point(col, row), Point(cvRound(col + fxy.x), cvRound(row + fxy.y)), Scalar(0, 255, 0), 2, 8, 0);
// circle(image, Point(col, row), 2, Scalar(0, 0, 255), -1);
}
}
}
}
效果图: