为传递函数自动设定PID参数——pidtune学习笔记
装置模型和PID控制器的基本模型
在命令行里设计PID控制器
装置模型为一个传递函数:
s y s = 1 ( s + 1 ) 3 s y s=\frac{1}{(s+1)^{3}} sys=(s+1)31
首先创建一个装置的模型sys,并设计一个简单的PI控制器
sys = zpk([],[-1 -1 -1],1);
% C_pi是一个PI开环控制器
[C_pi,info] = pidtune(sys,'Pi');
此时装置模型和控制器分别为
sys =
1
-------
(s+1)^3
Continuous-time zero/pole/gain model.
C_pi =
1
Kp + Ki * ---
s
with Kp = 1.14, Ki = 0.454
Continuous-time PI controller in parallel form.
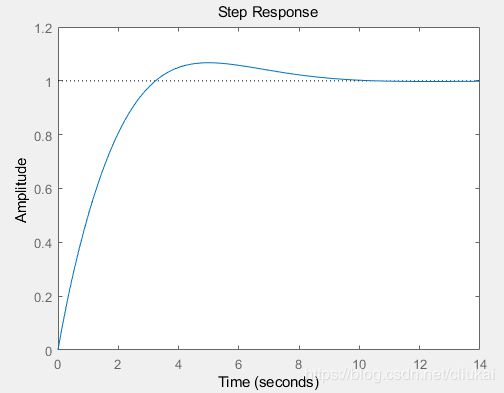
接着创建一个反馈控制器,并检查闭环的阶跃相应
% 反馈控制
T_pi = feedback(C_pi*sys, 1);
% 画图,显示阶跃相应
step(T_pi)
得到
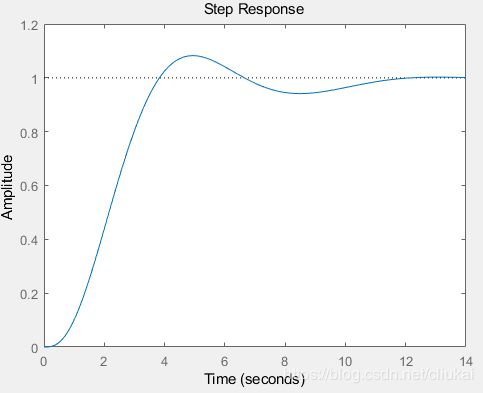
将交叉频率设定成1.0
% 提高响应时间
% 设计一个快速反应的PI控制器
[C_pi_fast,info] = pidtune(sys,'Pi',1.0);
T_pi_fast = feedback(C_pi_fast*sys,1);
step(T_pi,T_pi_fast)
axis([ 0 30 0 1.4])
legend('PI','PI_fast')
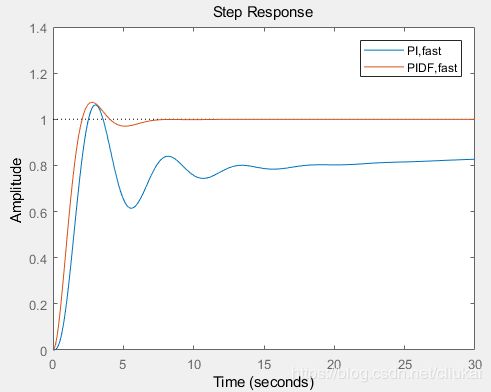
最终发现始终无法达到参考值,因为PI控制器的自由度不够,最后设计一个PIDF控制器
% PIDF控制器
[C_pidf_fast,info] = pidtune(sys,'PIDF',1.0)
T_pidf_fast = feedback(C_pidf_fast*sys,1);
% 对比PI控制器和PIDF控制器
step(T_pi_fast, T_pidf_fast);
axis([0 30 0 1.4]);
legend('PI,fast','PIDF,fast');
设计一个2-DOF二自由度的PID控制器
装置的二阶传递函数模型为:
G ( s ) = 1 s 2 + 0.5 s + 0.1 G(s)=\frac{1}{s^{2}+0.5 s+0.1} G(s)=s2+0.5s+0.11
使用1.5rad/s的带宽:
wc = 1.5;
G = tf(1,[1 0.5 0.1]);
C2 = pidtune(G,'PID2',wc)
或者直接使用PID这样的type模式,例如
传递函数如下:
G = tf(0.0575,[1 2.4635 0.7980]) Controller_PID = pidtune(G,'PID')
控制器为
Controller_PID =
1
Kp + Ki * --- + Kd * s
s
with Kp = 27.7, Ki = 15, Kd = 11.3
Continuous-time PID controller in parallel form.
添加闭环控制
Controller_feedback = feedback(Controller_PID*G,1)
Controller_feedback =
0.6471 s^2 + 1.594 s + 0.8617
----------------------------------
s^3 + 3.111 s^2 + 2.392 s + 0.8617
Continuous-time transfer function.
% 画图
step(Controller_feedback)