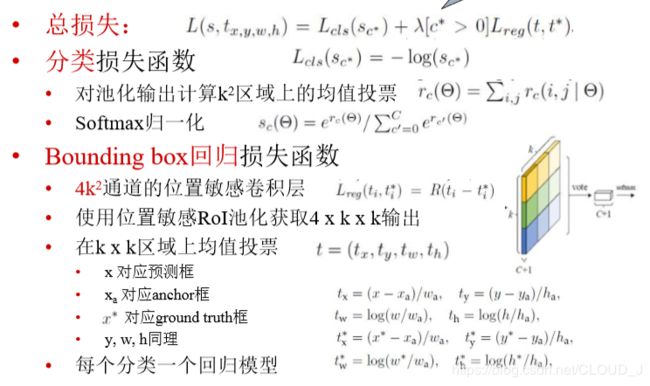
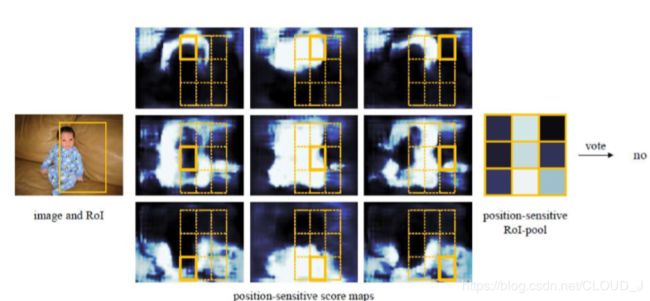
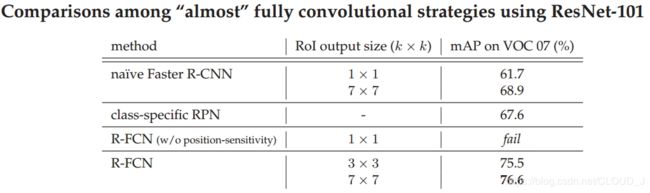
- LocalDateTime 转 String
igotyback
java开发语言
importjava.time.LocalDateTime;importjava.time.format.DateTimeFormatter;publicclassMain{publicstaticvoidmain(String[]args){//获取当前时间LocalDateTimenow=LocalDateTime.now();//定义日期格式化器DateTimeFormatterformat
- Linux下QT开发的动态库界面弹出操作(SDL2)
13jjyao
QT类qt开发语言sdl2linux
需求:操作系统为linux,开发框架为qt,做成需带界面的qt动态库,调用方为java等非qt程序难点:调用方为java等非qt程序,也就是说调用方肯定不带QApplication::exec(),缺少了这个,QTimer等事件和QT创建的窗口将不能弹出(包括opencv也是不能弹出);这与qt调用本身qt库是有本质的区别的思路:1.调用方缺QApplication::exec(),那么我们在接口
- 多线程之——ExecutorCompletionService
阿福德
在我们开发中,经常会遇到这种情况,我们起多个线程来执行,等所有的线程都执行完成后,我们需要得到个线程的执行结果来进行聚合处理。我在内部代码评审时,发现了不少这种情况。看很多同学都使用正确,但比较啰嗦,效率也不高。本文介绍一个简单处理这种情况的方法:直接上代码:publicclassExecutorCompletionServiceTest{@TestpublicvoidtestExecutorCo
- tiff批量转png
诺有缸的高飞鸟
opencv图像处理pythonopencv图像处理
目录写在前面代码完写在前面1、本文内容tiff批量转png2、平台/环境opencv,python3、转载请注明出处:https://blog.csdn.net/qq_41102371/article/details/132975023代码importnumpyasnpimportcv2importosdeffindAllFile(base):file_list=[]forroot,ds,fsin
- 遥感影像的切片处理
sand&wich
计算机视觉python图像处理
在遥感影像分析中,经常需要将大尺寸的影像切分成小片段,以便于进行详细的分析和处理。这种方法特别适用于机器学习和图像处理任务,如对象检测、图像分类等。以下是如何使用Python和OpenCV库来实现这一过程,同时确保每个影像片段保留正确的地理信息。准备环境首先,确保安装了必要的Python库,包括numpy、opencv-python和xml.etree.ElementTree。这些库将用于图像处理
- windows下python opencv ffmpeg读取摄像头实现rtsp推流 拉流
图像处理大大大大大牛啊
opencv实战代码讲解视觉图像项目windowspythonopencv
windows下pythonopencvffmpeg读取摄像头实现rtsp推流拉流整体流程1.下载所需文件1.1下载rtsp推流服务器1.2下载ffmpeg2.开启RTSP服务器3.opencv读取摄像头并调用ffmpeg进行推流4.opencv进行拉流5.opencv异步拉流整体流程1.下载所需文件1.1下载rtsp推流服务器下载RTSP服务器下载页面https://github.com/blu
- c++ opencv4.3 sift匹配
图像处理大大大大大牛啊
图像处理opencv实战代码讲解opencvsiftc++opencv4特征点
c++opencv4.3sift匹配main.cppintmain(){vectorkeypoints1,keypoints2;Matimg1,img2,descriptors1,descriptors2;intnumF
- AI大模型的架构演进与最新发展
季风泯灭的季节
AI大模型应用技术二人工智能架构
随着深度学习的发展,AI大模型(LargeLanguageModels,LLMs)在自然语言处理、计算机视觉等领域取得了革命性的进展。本文将详细探讨AI大模型的架构演进,包括从Transformer的提出到GPT、BERT、T5等模型的历史演变,并探讨这些模型的技术细节及其在现代人工智能中的核心作用。一、基础模型介绍:Transformer的核心原理Transformer架构的背景在Transfo
- ubuntu安装opencv最快的方法
Derek重名了
最快方法,当然不能太多文字$sudoapt-getinstallpython-opencv借助python就可以把ubuntu的opencv环境搞起来,非常快非常容易参考:https://docs.opencv.org/trunk/d2/de6/tutorial_py_setup_in_ubuntu.html
- 代码的执行效果
高天
packagecom20210409;publicclassdemo04{publicstaticvoidmain(String[]args){//////&&当前的条件不满足,则最后结果一定不满足,后面的条件不再执行////&不管条件是否满足所有条件均作判断//intx=1,y=1;//if(++y==2&&x++==2){//x=7;//}//System.out.println("x="+x
- 个人学习笔记7-6:动手学深度学习pytorch版-李沐
浪子L
深度学习深度学习笔记计算机视觉python人工智能神经网络pytorch
#人工智能##深度学习##语义分割##计算机视觉##神经网络#计算机视觉13.11全卷积网络全卷积网络(fullyconvolutionalnetwork,FCN)采用卷积神经网络实现了从图像像素到像素类别的变换。引入l转置卷积(transposedconvolution)实现的,输出的类别预测与输入图像在像素级别上具有一一对应关系:通道维的输出即该位置对应像素的类别预测。13.11.1构造模型下
- 计算机视觉中,Pooling的作用
Wils0nEdwards
计算机视觉人工智能
在计算机视觉中,Pooling(池化)是一种常见的操作,主要用于卷积神经网络(CNN)中。它通过对特征图进行下采样,减少数据的空间维度,同时保留重要的特征信息。Pooling的作用可以归纳为以下几个方面:1.降低计算复杂度与内存需求Pooling操作通过对特征图进行下采样,减少了特征图的空间分辨率(例如,高度和宽度)。这意味着网络需要处理的数据量会减少,从而降低了计算量和内存需求。这对大型神经网络
- 使用Python和Playwright破解滑动验证码
asfdsgdf
python开发语言
滑动验证码是一种常见的验证码形式,通过拖动滑块将缺失的拼图块对准原图中的空缺位置来验证用户操作。本文将介绍如何使用Python中的OpenCV进行模板匹配,并结合Playwright实现自动化破解滑动验证码的过程。所需技术OpenCV模板匹配:用于识别滑块在背景图中的正确位置。Python:主要编程语言。Playwright:用于浏览器自动化,模拟用户操作。破解过程概述获取验证码图像:下载背景图和
- OpenCV图像处理技术(Python)——入门
森屿_
opencv
©FuXianjun.AllRightsReserved.OpenCV入门图像作为人类感知世界的视觉基础,是人类获取信息、表达信息的重要手段,OpenCV作为一个开源的计算机视觉库,它包括几百个易用的图像成像和视觉函数,既可以用于学术研究,也可用于工业邻域,它于1999年由因特尔的GaryBradski启动,OpenCV库主要由C和C++语言编写,它可以在多个操作系统上运行。1.1图像处理基本操作
- opencv学习:图像旋转的两种方法,旋转后的图片进行模板匹配代码实现
夜清寒风
学习opencv机器学习人工智能计算机视觉
图像旋转在图像处理中,rotate和rot90是两种常见的图像旋转方法,它们在功能和使用上有一些区别。下面我将分别介绍这两种方法,并解释它们的主要区别rot90方法rot90方法是NumPy提供的一种数组旋转函数,它主要用于对二维数组(如图像)进行90度的旋转。这个方法比较简单,只支持90度的倍数旋转,不支持任意角度旋转。使用NumPy进行旋转使用NumPy的rot90函数对模板图像进行旋转操作。
- 探索创新科技: Lite-Mono - 简约高效的小型化Mono框架
杭律沛Meris
探索创新科技:Lite-Mono-简约高效的小型化Mono框架Lite-Mono[CVPR2023]Lite-Mono:ALightweightCNNandTransformerArchitectureforSelf-SupervisedMonocularDepthEstimation项目地址:https://gitcode.com/gh_mirrors/li/Lite-Mono如果你在寻找一个轻
- Python OpenCV图像处理:从基础到高级的全方位指南
极客代码
玩转Python开发语言pythonopencv图像处理计算机视觉
目录第一部分:PythonOpenCV图像处理基础1.1OpenCV简介1.2PythonOpenCV安装1.3实战案例:图像显示与保存1.4注意事项第二部分:PythonOpenCV图像处理高级技巧2.1图像变换2.2图像增强2.3图像复原第三部分:PythonOpenCV图像处理实战项目3.1图像滤波3.2图像分割3.3图像特征提取第四部分:PythonOpenCV图像处理注意事项与优化策略4
- C# 禁止程序重复启动
wiseyao1219
c#
修改:Program.cs[STAThread]staticvoidMain(){Mutexmutex=newMutex(true,"NewGuid123456",outboolisCreatedNew);if(!isCreatedNew){MessageBox.Show(Application.ProductName+"isrunning...");return;}Application.Ena
- 2018-08-16【Swift 4.1】 关于Swift4.0以后调用MJExtension无法模型转换问题
码农happy
1、本人使用swift4.1,弄了一晚上才弄好,结果还是一个小问题真是尴尬,要在model中每个属性前面加上@objcimportUIKitclassUserModel:NSObject{@objcvardix=String()}letdic=["dix":"ffffff"]asNSDictionaryletmodel=UserModel.mj_object(withKeyValues:dic)!
- python图像匹配_opencvpython中的图像匹配
weixin_39585675
python图像匹配
我一直在做一个项目,用opencvpython识别相机中显示的标志。我已经尝试过使用surf、颜色直方图匹配和模板匹配。但在这3个问题中,它并不总是返回正确的答案。我现在想要的是,解决我这个问题的最好办法是什么。模板图像示例:以下是摄像头中显示的标志示例。如果这是我想要识别的图像,该怎么用?在更新matchTemplate中的代码flags=["Cambodia.jpg","Laos.jpg","
- 利用Python+OpenCV实现截图匹配图像,支持自适应缩放、灰度匹配、区域匹配、匹配多个结果
xu-jssy
Python自动化脚本pythonopencv开发语言图像处理自动化
可以直接通过pip获取,无需手动安装其他依赖pipinstallxug示例:importxugxug.find_image_on_screen(,,,)=========================================================================一、依赖安装pipinstallopencv-pythonpipinstallpyautogui二、获
- day12 控制流程 if switch while do...while 猜数字游戏
卓越小Y
JAVA学习日志游戏java开发语言
控制流程顺序结构所有的程序都是按顺序执行if语句选择结构单选择语句if(a>0){System.out.println(“hello”);}packagecom.ckw.blog.select;importjava.util.Scanner;publicclassdemo01{publicstaticvoidmain(String[]args){intscore=0;Scannerscanner=
- Vector和Stack的用法
蟹道人
JavaSejava
/***作者:*日期:*功能:vector的用法*/packagecom.cg;importjava.util.*;publicclassDemo5{publicstaticvoidmain(String[]args){//Vector的使用Vectorvec=newVector();Empemp=newEmp("2011",25,"zhang");vec.add(emp);for(inti=0;
- C#文件被占用的解决方案
花北城
C#项目文件占用
问题打更新包时,提示文件被占用。System.IO.IOException:文件“D:\RS\RS_CCVI20111210.exe”正由另一进程使用,因此该进程无法访问该文件。在System.IO.__Error.WinIOError(Int32errorCode,StringmaybeFullPath)在System.IO.FileStream.Init(Stringpath,FileMode
- 数组拷贝Arraycopy
xing2516
Arraycopyjava
packageqing;//数组拷贝publicclassArraycopy{publicstaticvoidmain(String[]args){//一维数组拷贝Stringa[]={"小米","华为","阿里","腾讯","百度"};String[]aBak=newString[6];//从a数组第0个copy到数组aBak0个开始,长度是a数组长度System.arraycopy(a,0,a
- discuz discuz_admincp.php 讲解,Discuz! 1.5-2.5 命令执行漏洞分析(CVE-2018-14729)
weixin_39740419
discuz讲解
0x00漏洞简述漏洞信息8月27号有人在GitHub上公布了有关Discuz1.5-2.5版本中后台数据库备份功能存在的命令执行漏洞的细节。漏洞影响版本Discuz!1.5-2.50x01漏洞复现官方论坛下载相应版本就好。0x02漏洞分析需要注意的是这个漏洞其实是需要登录后台的,并且能有数据库备份权限,所以比较鸡肋。我这边是用Discuz!2.5完成漏洞复现的,并用此进行漏洞分析的。漏洞点在:so
- mysql 隐秘后门_【技术分享】CVE-2016-5483:利用mysqldump备份可生成后门
Toby Dai
mysql隐秘后门
预估稿费:100RMB投稿方式:发送邮件至linwei#360.cn,或登陆网页版在线投稿前言mysqldump是用来创建MySQL数据库逻辑备份的一个常用工具。它在默认配置下可以生成一个.sql文件,其中包含创建/删除表和插入数据等。在导入转储文件的时候,攻击者可以通过制造恶意表名来实现任意SQL语句查询和shell命令执行的目的。另一个与之相关的漏洞利用场景可以参考。攻击场景攻击者已经能够访问
- CV、NLP、数据控掘推荐、量化
海的那边-
AI算法自然语言处理人工智能
下面是对CV(计算机视觉)、NLP(自然语言处理)、数据挖掘推荐和量化的简要概述及其应用领域的介绍:1.CV(计算机视觉,ComputerVision)定义:计算机视觉是一门让计算机能够从图像或视频中提取有用信息,并做出决策的学科。它通过模拟人类的视觉系统来识别、处理和理解视觉信息。主要任务:图像分类:识别图像中的物体并分类,比如猫、狗、车等。目标检测:在图像或视频中定位并识别多个对象,如人脸检测
- 解决mysql漏洞 Oracle MySQL Server远程安全漏洞(CVE-2015-0411)
dieweidong5625
数据库运维java
有时候会检测到服务器有很多漏洞,而大部分漏洞都是由于服务的版本过低的原因,因为官网出现漏洞就会发布新版本来修复这个漏洞,所以一般情况下,我们只需要对相应的软件包进行升级到安全版本即可。通过查阅官网信息,OracleMySQLServer远程安全漏洞(CVE-2015-0411),受影响系统:OracleMySQLServer/usr/databases.sql//先备份原有所有数据,防止数据丢失。
- opencv 学习 1
木木ainiks
opencv计算机视觉python
opencv学习的第一天#coding:utf-8importcv2ascv#首先读图片src=cv.imread(“img/1.jpg”)#设置图片的名字cv.namedWindow(“1”,cv.WINDOW_AUTOSIZE)#显示图片第一个参数设置图片名,第二个参数图片的地址cv.imshow(“1”,src)cv.waitKey(0)#将图片写入固定位置cv.imwrite(“img/2
- PHP如何实现二维数组排序?
IT独行者
二维数组PHP排序
二维数组在PHP开发中经常遇到,但是他的排序就不如一维数组那样用内置函数来的方便了,(一维数组排序可以参考本站另一篇文章【PHP中数组排序函数详解汇总】)。二维数组的排序需要我们自己写函数处理了,这里UncleToo给大家分享一个PHP二维数组排序的函数:
代码:
functionarray_sort($arr,$keys,$type='asc'){
$keysvalue= $new_arr
- 【Hadoop十七】HDFS HA配置
bit1129
hadoop
基于Zookeeper的HDFS HA配置主要涉及两个文件,core-site和hdfs-site.xml。
测试环境有三台
hadoop.master
hadoop.slave1
hadoop.slave2
hadoop.master包含的组件NameNode, JournalNode, Zookeeper,DFSZKFailoverController
- 由wsdl生成的java vo类不适合做普通java vo
darrenzhu
VOwsdlwebservicerpc
开发java webservice项目时,如果我们通过SOAP协议来输入输出,我们会利用工具从wsdl文件生成webservice的client端类,但是这里面生成的java data model类却不适合做为项目中的普通java vo类来使用,当然有一中情况例外,如果这个自动生成的类里面的properties都是基本数据类型,就没问题,但是如果有集合类,就不行。原因如下:
1)使用了集合如Li
- JAVA海量数据处理之二(BitMap)
周凡杨
java算法bitmapbitset数据
路漫漫其修远兮,吾将上下而求索。想要更快,就要深入挖掘 JAVA 基础的数据结构,从来分析出所编写的 JAVA 代码为什么把内存耗尽,思考有什么办法可以节省内存呢? 啊哈!算法。这里采用了 BitMap 思想。
首先来看一个实验:
指定 VM 参数大小: -Xms256m -Xmx540m
- java类型与数据库类型
g21121
java
很多时候我们用hibernate的时候往往并不是十分关心数据库类型和java类型的对应关心,因为大多数hbm文件是自动生成的,但有些时候诸如:数据库设计、没有生成工具、使用原始JDBC、使用mybatis(ibatIS)等等情况,就会手动的去对应数据库与java的数据类型关心,当然比较简单的数据类型即使配置错了也会很快发现问题,但有些数据类型却并不是十分常见,这就给程序员带来了很多麻烦。
&nb
- Linux命令
510888780
linux命令
系统信息
arch 显示机器的处理器架构(1)
uname -m 显示机器的处理器架构(2)
uname -r 显示正在使用的内核版本
dmidecode -q 显示硬件系统部件 - (SMBIOS / DMI)
hdparm -i /dev/hda 罗列一个磁盘的架构特性
hdparm -tT /dev/sda 在磁盘上执行测试性读取操作
cat /proc/cpuinfo 显示C
- java常用JVM参数
墙头上一根草
javajvm参数
-Xms:初始堆大小,默认为物理内存的1/64(<1GB);默认(MinHeapFreeRatio参数可以调整)空余堆内存小于40%时,JVM就会增大堆直到-Xmx的最大限制
-Xmx:最大堆大小,默认(MaxHeapFreeRatio参数可以调整)空余堆内存大于70%时,JVM会减少堆直到 -Xms的最小限制
-Xmn:新生代的内存空间大小,注意:此处的大小是(eden+ 2
- 我的spring学习笔记9-Spring使用工厂方法实例化Bean的注意点
aijuans
Spring 3
方法一:
<bean id="musicBox" class="onlyfun.caterpillar.factory.MusicBoxFactory"
factory-method="createMusicBoxStatic"></bean>
方法二:
- mysql查询性能优化之二
annan211
UNIONmysql查询优化索引优化
1 union的限制
有时mysql无法将限制条件从外层下推到内层,这使得原本能够限制部分返回结果的条件无法应用到内层
查询的优化上。
如果希望union的各个子句能够根据limit只取部分结果集,或者希望能够先排好序在
合并结果集的话,就需要在union的各个子句中分别使用这些子句。
例如 想将两个子查询结果联合起来,然后再取前20条记录,那么mys
- 数据的备份与恢复
百合不是茶
oraclesql数据恢复数据备份
数据的备份与恢复的方式有: 表,方案 ,数据库;
数据的备份:
导出到的常见命令;
参数 说明
USERID 确定执行导出实用程序的用户名和口令
BUFFER 确定导出数据时所使用的缓冲区大小,其大小用字节表示
FILE 指定导出的二进制文
- 线程组
bijian1013
java多线程threadjava多线程线程组
有些程序包含了相当数量的线程。这时,如果按照线程的功能将他们分成不同的类别将很有用。
线程组可以用来同时对一组线程进行操作。
创建线程组:ThreadGroup g = new ThreadGroup(groupName);
&nbs
- top命令找到占用CPU最高的java线程
bijian1013
javalinuxtop
上次分析系统中占用CPU高的问题,得到一些使用Java自身调试工具的经验,与大家分享。 (1)使用top命令找出占用cpu最高的JAVA进程PID:28174 (2)如下命令找出占用cpu最高的线程
top -Hp 28174 -d 1 -n 1
32694 root 20 0 3249m 2.0g 11m S 2 6.4 3:31.12 java
- 【持久化框架MyBatis3四】MyBatis3一对一关联查询
bit1129
Mybatis3
当两个实体具有1对1的对应关系时,可以使用One-To-One的进行映射关联查询
One-To-One示例数据
以学生表Student和地址信息表为例,每个学生都有都有1个唯一的地址(现实中,这种对应关系是不合适的,因为人和地址是多对一的关系),这里只是演示目的
学生表
CREATE TABLE STUDENTS
(
- C/C++图片或文件的读写
bitcarter
写图片
先看代码:
/*strTmpResult是文件或图片字符串
* filePath文件需要写入的地址或路径
*/
int writeFile(std::string &strTmpResult,std::string &filePath)
{
int i,len = strTmpResult.length();
unsigned cha
- nginx自定义指定加载配置
ronin47
进入 /usr/local/nginx/conf/include 目录,创建 nginx.node.conf 文件,在里面输入如下代码:
upstream nodejs {
server 127.0.0.1:3000;
#server 127.0.0.1:3001;
keepalive 64;
}
server {
liste
- java-71-数值的整数次方.实现函数double Power(double base, int exponent),求base的exponent次方
bylijinnan
double
public class Power {
/**
*Q71-数值的整数次方
*实现函数double Power(double base, int exponent),求base的exponent次方。不需要考虑溢出。
*/
private static boolean InvalidInput=false;
public static void main(
- Android四大组件的理解
Cb123456
android四大组件的理解
分享一下,今天在Android开发文档-开发者指南中看到的:
App components are the essential building blocks of an Android
- [宇宙与计算]涡旋场计算与拓扑分析
comsci
计算
怎么阐述我这个理论呢? 。。。。。。。。。
首先: 宇宙是一个非线性的拓扑结构与涡旋轨道时空的统一体。。。。
我们要在宇宙中寻找到一个适合人类居住的行星,时间非常重要,早一个刻度和晚一个刻度,这颗行星的
- 同一个Tomcat不同Web应用之间共享会话Session
cwqcwqmax9
session
实现两个WEB之间通过session 共享数据
查看tomcat 关于 HTTP Connector 中有个emptySessionPath 其解释如下:
If set to true, all paths for session cookies will be set to /. This can be useful for portlet specification impleme
- springmvc Spring3 MVC,ajax,乱码
dashuaifu
springjquerymvcAjax
springmvc Spring3 MVC @ResponseBody返回,jquery ajax调用中文乱码问题解决
Spring3.0 MVC @ResponseBody 的作用是把返回值直接写到HTTP response body里。具体实现AnnotationMethodHandlerAdapter类handleResponseBody方法,具体实
- 搭建WAMP环境
dcj3sjt126com
wamp
这里先解释一下WAMP是什么意思。W:windows,A:Apache,M:MYSQL,P:PHP。也就是说本文说明的是在windows系统下搭建以apache做服务器、MYSQL为数据库的PHP开发环境。
工欲善其事,必须先利其器。因为笔者的系统是WinXP,所以下文指的系统均为此系统。笔者所使用的Apache版本为apache_2.2.11-
- yii2 使用raw http request
dcj3sjt126com
http
Parses a raw HTTP request using yii\helpers\Json::decode()
To enable parsing for JSON requests you can configure yii\web\Request::$parsers using this class:
'request' =&g
- Quartz-1.8.6 理论部分
eksliang
quartz
转载请出自出处:http://eksliang.iteye.com/blog/2207691 一.概述
基于Quartz-1.8.6进行学习,因为Quartz2.0以后的API发生的非常大的变化,统一采用了build模式进行构建;
什么是quartz?
答:简单的说他是一个开源的java作业调度框架,为在 Java 应用程序中进行作业调度提供了简单却强大的机制。并且还能和Sp
- 什么是POJO?
gupeng_ie
javaPOJO框架Hibernate
POJO--Plain Old Java Objects(简单的java对象)
POJO是一个简单的、正规Java对象,它不包含业务逻辑处理或持久化逻辑等,也不是JavaBean、EntityBean等,不具有任何特殊角色和不继承或不实现任何其它Java框架的类或接口。
POJO对象有时也被称为Data对象,大量应用于表现现实中的对象。如果项目中使用了Hiber
- jQuery网站顶部定时折叠广告
ini
JavaScripthtmljqueryWebcss
效果体验:http://hovertree.com/texiao/jquery/4.htmHTML文件代码:
<!DOCTYPE html>
<html xmlns="http://www.w3.org/1999/xhtml">
<head>
<title>网页顶部定时收起广告jQuery特效 - HoverTree<
- Spring boot内嵌的tomcat启动失败
kane_xie
spring boot
根据这篇guide创建了一个简单的spring boot应用,能运行且成功的访问。但移植到现有项目(基于hbase)中的时候,却报出以下错误:
SEVERE: A child container failed during start
java.util.concurrent.ExecutionException: org.apache.catalina.Lif
- leetcode: sort list
michelle_0916
Algorithmlinked listsort
Sort a linked list in O(n log n) time using constant space complexity.
====analysis=======
mergeSort for singly-linked list
====code======= /**
* Definition for sin
- nginx的安装与配置,中途遇到问题的解决
qifeifei
nginx
我使用的是ubuntu13.04系统,在安装nginx的时候遇到如下几个问题,然后找思路解决的,nginx 的下载与安装
wget http://nginx.org/download/nginx-1.0.11.tar.gz
tar zxvf nginx-1.0.11.tar.gz
./configure
make
make install
安装的时候出现
- 用枚举来处理java自定义异常
tcrct
javaenumexception
在系统开发过程中,总少不免要自己处理一些异常信息,然后将异常信息变成友好的提示返回到客户端的这样一个过程,之前都是new一个自定义的异常,当然这个所谓的自定义异常也是继承RuntimeException的,但这样往往会造成异常信息说明不一致的情况,所以就想到了用枚举来解决的办法。
1,先创建一个接口,里面有两个方法,一个是getCode, 一个是getMessage
public
- erlang supervisor分析
wudixiaotie
erlang
当我们给supervisor指定需要创建的子进程的时候,会指定M,F,A,如果是simple_one_for_one的策略的话,启动子进程的方式是supervisor:start_child(SupName, OtherArgs),这种方式可以根据调用者的需求传不同的参数给需要启动的子进程的方法。和最初的参数合并成一个数组,A ++ OtherArgs。那么这个时候就有个问题了,既然参数不一致,那