pixhawk 为实际调试做的准备
感谢兰州—Zing的指教。。
1. 飞行日志
下载flightplot,官网是http://www.pixhawk.com/dev/flightplot
px4飞行日志位置在log文件夹中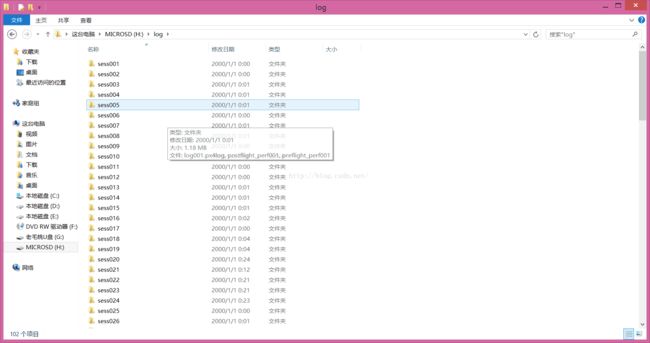
数字越大表示越新,新加的日志不会覆盖旧的日志。
日志简单操作:
第一步:Open Log orFile→OpenLog….打开你要看的日志
第二步:点 Field List,选择你想看的数据类型,点Add.添加你要看的数据类型

第三步:添加进“simple”里面
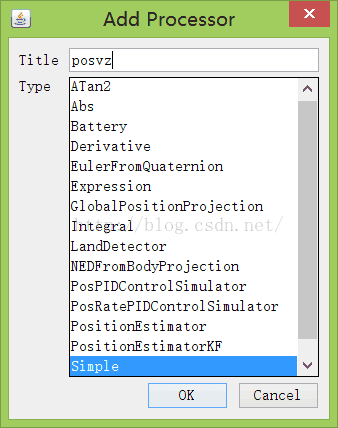
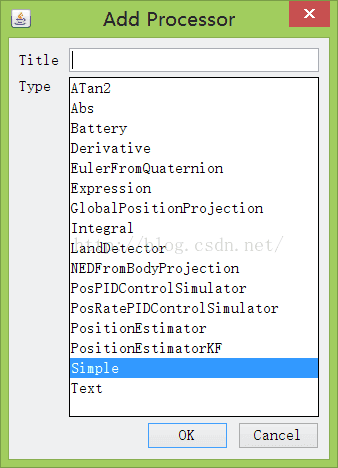
第四步:flightplot为用户开发了函数功能,在画图区点Add,可以将处理完的数据画出来。
最后的效果:

绿颜色:传感器测的高度 红颜色:期望高度 蓝颜色:垂直方向速度 黑颜色:垂直速度的积分
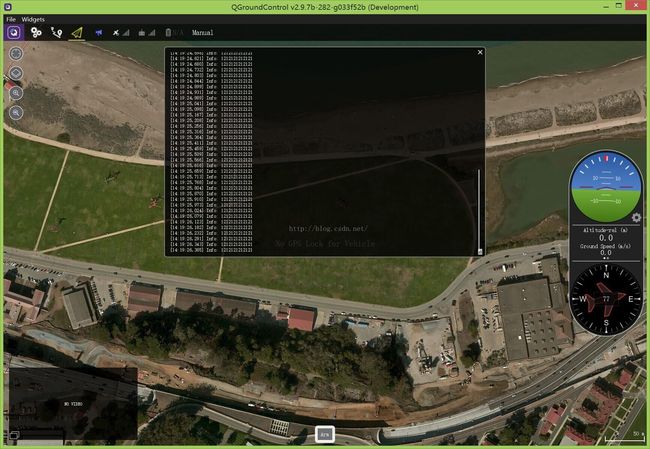
2. mavlink添加想发送的信息
mavlink_log_info(&mavlink_log_pub, "1212121212121");
mavlink_log_critical(&mavlink_log_pub, "czyv587...")
int ii=0;
if(ii<1000)
{
mavlink_and_console_log_info(&mavlink_log_pub, "czy: #%ii", ii);
ii++;
}
else
ii=0;
3. nsh
第一步:打开TeraTerm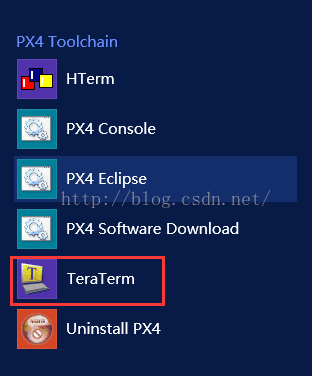
第二步:点setup选Serial port setup,并设置串口和波特率(默认COM5,57600)

第三步:输入命令:先回车,再输入“?”或者“help”,编译好的应用会被打印出来
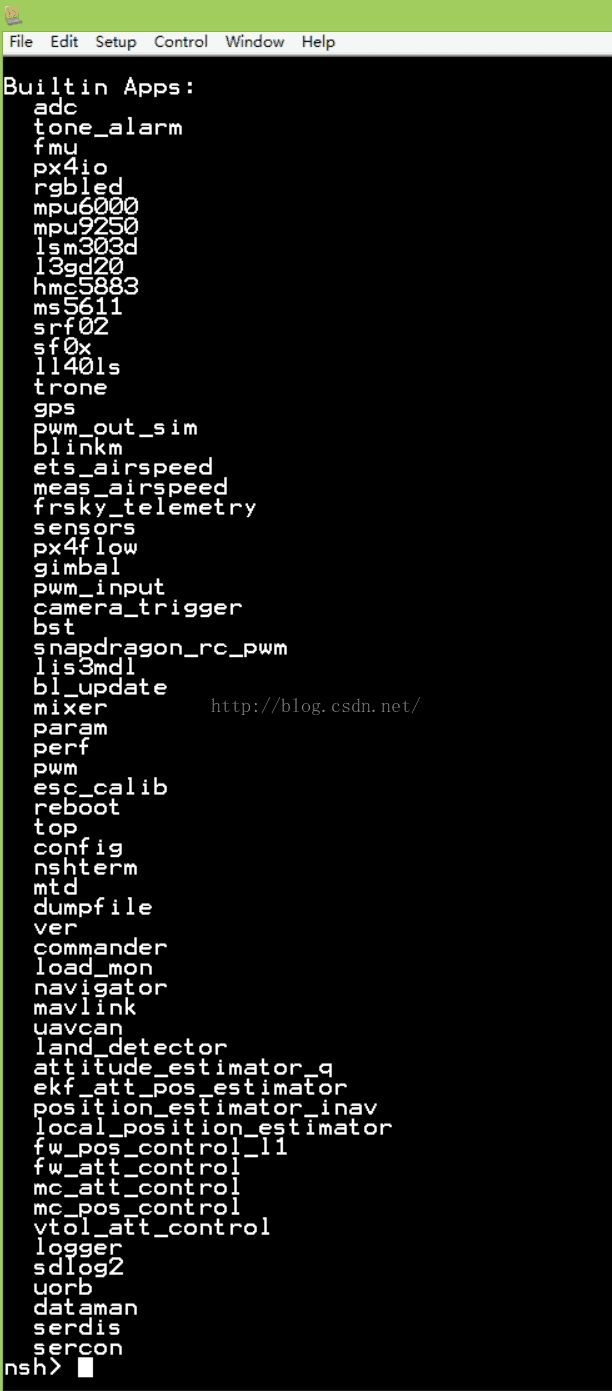
第四步:重点看你需要看的部分(输入的命令)

总结:nsh输入的命令调试bug,首先需要将你要调试的部分用cmke编译生成.px4,输入“?”会显示所以编译好的应用,输入的命令实际上是在程序中写好的,对应于每个应用的相应位置。添加一个应用,有助于帮助理解nsh
int commander_main(int argc, char *argv[])
{
if (argc < 2) {
usage("missing command");
return 1;
}
if (!strcmp(argv[1], "start")) {
if (thread_running) {
warnx("already running");
/* this is not an error */
return 0;
}
thread_should_exit = false;
daemon_task = px4_task_spawn_cmd("commander",
SCHED_DEFAULT,
SCHED_PRIORITY_DEFAULT + 40,
3600,
commander_thread_main,
(char * const *)&argv[0]);
unsigned constexpr max_wait_us = 1000000;
unsigned constexpr max_wait_steps = 2000;
unsigned i;
for (i = 0; i < max_wait_steps; i++) {
usleep(max_wait_us / max_wait_steps);
if (thread_running) {
break;
}
}
return !(i < max_wait_steps);
}
if (!strcmp(argv[1], "stop")) {
if (!thread_running) {
warnx("commander already stopped");
return 0;
}
thread_should_exit = true;
while (thread_running) {
usleep(200000);
warnx(".");
}
warnx("terminated.");
return 0;
}
/* commands needing the app to run below */
if (!thread_running) {
warnx("\tcommander not started");
return 1;
}
if (!strcmp(argv[1], "status")) {
print_status();
return 0;
}
if (!strcmp(argv[1], "calibrate")) {
if (argc > 2) {
int calib_ret = OK;
if (!strcmp(argv[2], "mag")) {
calib_ret = do_mag_calibration(&mavlink_log_pub);
} else if (!strcmp(argv[2], "accel")) {
calib_ret = do_accel_calibration(&mavlink_log_pub);
} else if (!strcmp(argv[2], "gyro")) {
calib_ret = do_gyro_calibration(&mavlink_log_pub);
} else if (!strcmp(argv[2], "level")) {
calib_ret = do_level_calibration(&mavlink_log_pub);
} else if (!strcmp(argv[2], "esc")) {
calib_ret = do_esc_calibration(&mavlink_log_pub, &armed);
} else if (!strcmp(argv[2], "airspeed")) {
calib_ret = do_airspeed_calibration(&mavlink_log_pub);
} else {
warnx("argument %s unsupported.", argv[2]);
}
if (calib_ret) {
warnx("calibration failed, exiting.");
return 1;
} else {
return 0;
}
} else {
warnx("missing argument");
}
}
if (!strcmp(argv[1], "check")) {
int checkres = 0;
checkres = preflight_check(&status, &mavlink_log_pub, false, true, &status_flags, &battery);
warnx("Preflight check: %s", (checkres == 0) ? "OK" : "FAILED");
checkres = preflight_check(&status, &mavlink_log_pub, true, true, &status_flags, &battery);
warnx("Prearm check: %s", (checkres == 0) ? "OK" : "FAILED");
return 0;
}
if (!strcmp(argv[1], "arm")) {
if (TRANSITION_CHANGED != arm_disarm(true, &mavlink_log_pub, "command line")) {
warnx("arming failed");
}
return 0;
}
if (!strcmp(argv[1], "disarm")) {
if (TRANSITION_DENIED == arm_disarm(false, &mavlink_log_pub, "command line")) {
warnx("rejected disarm");
}
return 0;
}
if (!strcmp(argv[1], "takeoff")) {
/* see if we got a home position */
if (status_flags.condition_home_position_valid) {
if (TRANSITION_DENIED != arm_disarm(true, &mavlink_log_pub, "command line")) {
vehicle_command_s cmd = {};
cmd.target_system = status.system_id;
cmd.target_component = status.component_id;
cmd.command = vehicle_command_s::VEHICLE_CMD_NAV_TAKEOFF;
cmd.param1 = NAN; /* minimum pitch */
/* param 2-3 unused */
cmd.param2 = NAN;
cmd.param3 = NAN;
cmd.param4 = NAN;
cmd.param5 = NAN;
cmd.param6 = NAN;
cmd.param7 = NAN;
orb_advert_t h = orb_advertise(ORB_ID(vehicle_command), &cmd);
(void)orb_unadvertise(h);
} else {
warnx("arming failed");
}
} else {
warnx("rejecting takeoff, no position lock yet. Please retry..");
}
return 0;
}
if (!strcmp(argv[1], "land")) {
vehicle_command_s cmd = {};
cmd.target_system = status.system_id;
cmd.target_component = status.component_id;
cmd.command = vehicle_command_s::VEHICLE_CMD_NAV_LAND;
/* param 2-3 unused */
cmd.param2 = NAN;
cmd.param3 = NAN;
cmd.param4 = NAN;
cmd.param5 = NAN;
cmd.param6 = NAN;
cmd.param7 = NAN;
orb_advert_t h = orb_advertise(ORB_ID(vehicle_command), &cmd);
(void)orb_unadvertise(h);
return 0;
}
if (!strcmp(argv[1], "transition")) {
vehicle_command_s cmd = {};
cmd.target_system = status.system_id;
cmd.target_component = status.component_id;
cmd.command = vehicle_command_s::VEHICLE_CMD_DO_VTOL_TRANSITION;
/* transition to the other mode */
cmd.param1 = (status.is_rotary_wing) ? vtol_vehicle_status_s::VEHICLE_VTOL_STATE_FW : vtol_vehicle_status_s::VEHICLE_VTOL_STATE_MC;
/* param 2-3 unused */
cmd.param2 = NAN;
cmd.param3 = NAN;
cmd.param4 = NAN;
cmd.param5 = NAN;
cmd.param6 = NAN;
cmd.param7 = NAN;
orb_advert_t h = orb_advertise(ORB_ID(vehicle_command), &cmd);
(void)orb_unadvertise(h);
return 0;
}
if (!strcmp(argv[1], "mode")) {
if (argc > 2) {
uint8_t new_main_state = commander_state_s::MAIN_STATE_MAX;
if (!strcmp(argv[2], "manual")) {
new_main_state = commander_state_s::MAIN_STATE_MANUAL;
} else if (!strcmp(argv[2], "altctl")) {
new_main_state = commander_state_s::MAIN_STATE_ALTCTL;
} else if (!strcmp(argv[2], "posctl")) {
new_main_state = commander_state_s::MAIN_STATE_POSCTL;
} else if (!strcmp(argv[2], "auto:mission")) {
new_main_state = commander_state_s::MAIN_STATE_AUTO_MISSION;
} else if (!strcmp(argv[2], "auto:loiter")) {
new_main_state = commander_state_s::MAIN_STATE_AUTO_LOITER;
} else if (!strcmp(argv[2], "auto:rtl")) {
new_main_state = commander_state_s::MAIN_STATE_AUTO_RTL;
} else if (!strcmp(argv[2], "acro")) {
new_main_state = commander_state_s::MAIN_STATE_ACRO;
} else if (!strcmp(argv[2], "offboard")) {
new_main_state = commander_state_s::MAIN_STATE_OFFBOARD;
} else if (!strcmp(argv[2], "stabilized")) {
new_main_state = commander_state_s::MAIN_STATE_STAB;
} else if (!strcmp(argv[2], "rattitude")) {
new_main_state = commander_state_s::MAIN_STATE_RATTITUDE;
} else if (!strcmp(argv[2], "auto:takeoff")) {
new_main_state = commander_state_s::MAIN_STATE_AUTO_TAKEOFF;
} else if (!strcmp(argv[2], "auto:land")) {
new_main_state = commander_state_s::MAIN_STATE_AUTO_LAND;
} else {
warnx("argument %s unsupported.", argv[2]);
}
if (TRANSITION_DENIED == main_state_transition(&status, new_main_state, main_state_prev, &status_flags, &internal_state)) {
warnx("mode change failed");
}
return 0;
} else {
warnx("missing argument");
}
}
if (!strcmp(argv[1], "lockdown")) {
if (argc < 3) {
usage("not enough arguments, missing [on, off]");
return 1;
}
vehicle_command_s cmd = {};
cmd.target_system = status.system_id;
cmd.target_component = status.component_id;
cmd.command = vehicle_command_s::VEHICLE_CMD_DO_FLIGHTTERMINATION;
/* if the comparison matches for off (== 0) set 0.0f, 2.0f (on) else */
cmd.param1 = strcmp(argv[2], "off") ? 2.0f : 0.0f; /* lockdown */
// XXX inspect use of publication handle
(void)orb_advertise(ORB_ID(vehicle_command), &cmd);
return 0;
}
usage("unrecognized command");
return 1;
}4. QGC调试的用法
(1) 参数修改的地方

这些参数对应着程序parameter_update
(2) 查看飞控实时的各种数据(都是通过mavlink传输过来的)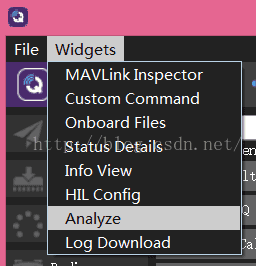
点击你要看的数据前面的方框

如果您觉得此文对您的发展有用,请随意打赏。
您的鼓励将是笔者书写高质量文章的最大动力^_^!!
