OpenCv-C++-KAZE(AKAZE)局部特征匹配(二)
上一篇已经做出了KAZE(AKAZE)局部特征的检测,就差匹配没有做到。
那么,现在来实现一下:
放上代码:
#include
#include
#include
using namespace cv;
using namespace std;
Mat img1,img2;
int main(int argc, char** argv)
{
img1 = imread("D:/test/box.png", IMREAD_GRAYSCALE);
img2 = imread("D:/test/box_in_scene.png", IMREAD_GRAYSCALE);
if (!img1.data||!img2.data)
{
printf("图片未找到...");
return -1;
}
imshow("input box", img1);
imshow("input box_in_scene", img2);
double t1 = getTickCount();
//检测特征点(非线性)
Ptrdetector = AKAZE::create();
//Ptrdetector = KAZE::create();//KAZE检测
//存放描述子
Mat descriptor_obj,descriptor_scene;
//img1特征点检测并计算描述子
vector keypoints_obj;
detector->detectAndCompute(img1, Mat(), keypoints_obj, descriptor_obj);
//img2特征点检测并计算描述子
vector keypoints_scene;
detector->detectAndCompute(img2, Mat(), keypoints_scene,descriptor_scene);
double t2 = getTickCount();
double t = (t2 - t1) * 1000 / getTickFrequency();//结果转化为毫秒
printf("特征点寻找所花费时间(ms):%f", t);
//使用FLANN匹配器比较两个关键点的匹配度
FlannBasedMatcher fbMatcher(new flann::LshIndexParams(20,10,2));//用LshIndexParams
/*这里不能使用FlannBasedMatcher fbMatcher();这条语句,因为它不支持CV_8UC1类型,
会报错,OpenCv暂时还没有解决这一问题。*/
//也可以使用暴力匹配(BFMatcher bfmatches;)
BFMatcher bfmatches;
vectormatches;
fbMatcher.match(descriptor_obj, descriptor_scene, matches);
//绘制匹配线
Mat resultImg;
drawMatches(img1, keypoints_obj, img2, keypoints_scene, matches, resultImg,
Scalar::all(-1), Scalar::all(-1),vector(),DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
/*最后一个参数使用DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS就可以把检测到的特征点隐去,
只留下匹配到的特征点。*/
imshow("AKAZE Matches", resultImg);
/*那么上面的操作所显示的结果匹配到的特征点很多,为了减少多余的特征点,下面进行
如下操作*/
vectorgoodmatches;//保存从众多匹配点中找出的最优点
/*
1、遍历整个描述子;
2、从描述子中找出最优匹配点(距离最小)
*/
double minDist = 1000;//初始化
double maxDist = 0;
for (int i = 0; i < descriptor_obj.rows; i++)
{
double dist = matches[i].distance;
if (dist > maxDist)
{
maxDist = dist;
}
if (dist < minDist)
{
minDist = dist;
}
}
for (int i = 0; i < descriptor_obj.rows; i++)
{
double dist = matches[i].distance;
if (dist < max(2 * minDist, 0.02))
{
goodmatches.push_back(matches[i]);
}
}
Mat goodmatchesImg;
drawMatches(img1, keypoints_obj, img2, keypoints_scene, goodmatches, goodmatchesImg,
Scalar::all(-1), Scalar::all(-1), vector(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow("goodmatchesImg", goodmatchesImg);
//用线匹配不直观,用透视矩阵来做
//-------------------平面对象识别(将匹配到的内容替换为矩形)--------------------------
//生成透视变换矩阵
vector obj;
vector objinscene;
for (size_t i = 0; i < goodmatches.size(); i++)
{
obj.push_back(keypoints_obj[goodmatches[i].queryIdx].pt);
objinscene.push_back(keypoints_scene[goodmatches[i].trainIdx].pt);
}
Mat H = findHomography(obj, objinscene, RANSAC); //生成透视变换矩阵
vector obj_corner(4);//源图片4个角的坐标
vector objinscene_corner(4);
obj_corner[0] = Point(0,0);
obj_corner[1] = Point(img1.cols, 0);
obj_corner[2] = Point(img1.cols, img1.rows);
obj_corner[3] = Point(0, img1.rows);
//------------------透视变换---------------------
perspectiveTransform(obj_corner, objinscene_corner, H);
Mat pptfImg= goodmatchesImg.clone();
line(pptfImg, objinscene_corner[0] + Point2f(img1.cols, 0), objinscene_corner[1] + Point2f(img1.cols, 0), Scalar(0, 0, 255), 2, 8, 0);
line(pptfImg, objinscene_corner[1] + Point2f(img1.cols, 0), objinscene_corner[2] + Point2f(img1.cols, 0), Scalar(0, 0, 255), 2, 8, 0);
line(pptfImg, objinscene_corner[2] + Point2f(img1.cols, 0), objinscene_corner[3] + Point2f(img1.cols, 0), Scalar(0, 0, 255), 2, 8, 0);
line(pptfImg, objinscene_corner[3] + Point2f(img1.cols, 0), objinscene_corner[0] + Point2f(img1.cols, 0), Scalar(0, 0, 255), 2, 8, 0);
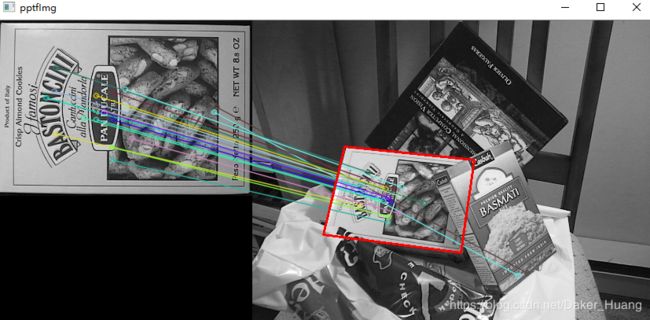
imshow("pptfImg", pptfImg);
waitKey(0);
return 0;
}
具体说明已经在注释中有说明。
运行结果: