opencv中adaboost训练算法分析
0、概述
opencv集成了经典adaboost算法,并结合haar特征实现了人脸检测功能。算法原理可参考人脸检测大牛Paul Viola 的文章《Rapid Object Detection using a Boosted Cascade of Simple Feature》。由于该算法堪称经典,并可推广应用于其他相关检测识别领域(如车牌检测、车辆检测识别),因此有必要从源码上学习其实现过程。人脸检测说是检测,实际上关键算法体现在训练(training)模块,openCV2.4.4 内含haartraining代码,本篇博文及后续相关博文都基于training算法为说明对象。
1 预备知识
1. 什么是haar特征?
haar特征是众多图像特征中的一种,计算方法为将特征窗口内的像素相加或相减。典型特征窗口如下图所示;

2. 一副图像上haar特征为什么有很多,具体有多少个?
由于haar特征窗口可有很多种类别,如上图中的(A、B、C、D不限于此四类)类,每一种类又可以变化特征窗口的尺度,在类别和尺度都确定的基础上,haar特征窗口还可以在样本图像上平移滑动。因此,一副图像上可生成众多haar特征。
具体个数请参考其他博文。haar特征及个数计算
3. 为什么要计算haar特征?
每一个haar特征可视为一个弱分类器(后面会解释),训练过程就是选择弱分类器(haar特征)的过程。
4. 什么是积分图,为什么用积分图?
积分图可加快haar特征的计算。
5. 什么是adaboost算法,如何实现?
集成学习算法包括两大类算法:bagging 算法和boosting 算法。
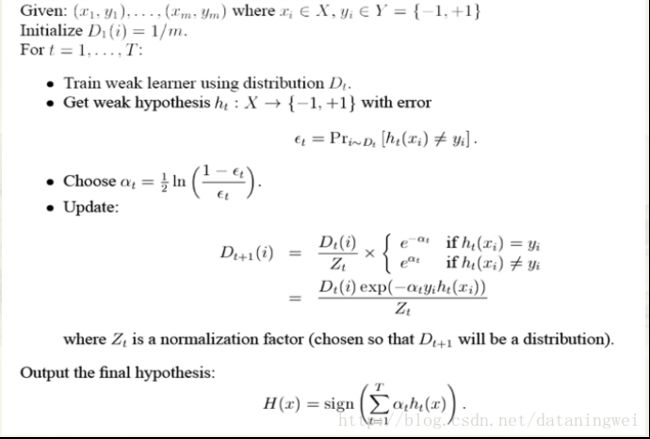
adaboost属于集成学习算法boosting的一种实现,在《Rapid Object Detection using a Boosted Cascade of Simple Features》作者论文中给出了adaboost算法流程图:

需要说明的是,该流程与opencv实现的方法有些出入,如openCV将负样本标记为-1,而文
献中标记为0,因此强分类器的阈值判断也不同。
openCV实现的adaboost,更接近于此片博文adaboost算法原理推导
6. 什么是决策树,为什么要用决策树?
决策树(Decision Tree)是在已知各种情况发生概率的基础上,通过构成决策树来求取净现值的期望值大于等于零的概率,评价项目风险,判断其可行性的决策分析方法,是直观运用概率分析的一种图解法。由于这种决策分支画成图形很像一棵树的枝干,故称决策树。在机器学习中,决策树是一个预测模型,他代表的是对象属性与对象值之间的一种映射关系。Entropy = 系统的凌乱程度,使用算法ID3, C4.5和C5.0生成树算法使用熵。这一度量是基于信息学理论中熵的概念。(盗用百度百科)
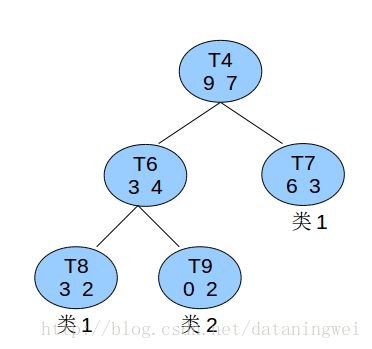
为啥要知道决策树? 因为opencV利用CART树,实现的弱分类器训练。
2 分类器训练
为了表述的严谨性,本博文涉及的几个常用名词定义如下:
(1)弱分类器:在本博文就是指CART,当CART只有一个分裂节点时,CART退化为Stump。CART的每个分裂节点都由1个haar特征。
(2)强分类器:在本文下就是指Stage。
2.1 分类器训练概览
知道了haar特征,知道了adaboost,那么openCV到底是如何实现训练分类器的呢? 整体框架如下图所示。算法采用Cascade Tree结构,cascade Tree内部由多个stage构成,stage内部又由多个CART构成。opencv 实现分类器训练的过程就是建立cacade Tree的过程。

分类器最基本的训练单元为CART,然后是生成stage,最后建立cascade,以下详细展开分析。
源码调用关系图如下:
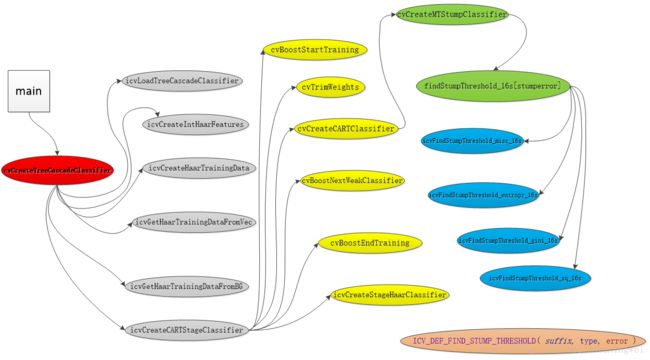
2.2 CART创建
CART创建的关键是搜索并获得有效的haar特征。所涉及的函数及调用关系如下:
CvClassifier* cvCreateMTStumpClassifier( CvMat* trainData, //训练样本
int flags, //行、列
CvMat* trainClasses, //类别标识,正样本+1,负样本-1
CvMat* /*typeMask*/,
CvMat* missedMeasurementsMask,
CvMat* compIdx,
CvMat* sampleIdx,
CvMat* weights, // 样本权重
CvClassifierTrainParams* trainParams //训练参数
//stumperror分裂规则:"misclass", "gini", "entropy"
)cvCreateMTStumpClassifier 函数是创建CART的主函数,此过程是训练最耗时的一部分。此函数在内部调用findStumpThreshold_16s[stumperror],搜索弱分类器的阈值。
CvFindThresholdFunc findStumpThreshold_16s[4] = {
icvFindStumpThreshold_misc_16s,
icvFindStumpThreshold_gini_16s,
icvFindStumpThreshold_entropy_16s,
icvFindStumpThreshold_sq_16s
};以上为函数指针,每个函数指针都是以宏实现。以熵衰减规则分裂节点函数(icvFindStumpThreshold_gini_16s)为例,定义如下
/* entropy error
* err = - wpos * log(wpos / (wpos + wneg)) - wneg * log(wneg / (wpos + wneg))
*/
#define ICV_DEF_FIND_STUMP_THRESHOLD_ENTROPY( suffix, type ) \
ICV_DEF_FIND_STUMP_THRESHOLD( entropy_##suffix, type, \
wposl = 0.5F * ( wl + wyl ); //左分支点中正样本权重和 \
wposr = 0.5F * ( wr + wyr ); //右分支点中正样本权重和 \
curleft = 0.5F * ( 1.0F + curleft ); //左分支中正样本权重和/左分支正负样本权重总和(左分支中正样本所占的比例,超过0.5则分类为正) \
curright = 0.5F * ( 1.0F + curright ); // 右分支正样本权重和/右分支正负样本权重总和(右分支中正样本所占比例,超过0.5则分类为负) \
curlerror = currerror = 0.0F; \
if( curleft > CV_ENTROPY_THRESHOLD ) // 左分支熵 \
curlerror -= wposl * logf( curleft ); \
if( curleft < 1.0F - CV_ENTROPY_THRESHOLD ) \
curlerror -= (wl - wposl) * logf( 1.0F - curleft ); \
\
if( curright > CV_ENTROPY_THRESHOLD ) //右分支熵 \
currerror -= wposr * logf( curright ); \
if( curright < 1.0F - CV_ENTROPY_THRESHOLD ) \
currerror -= (wr - wposr) * logf( 1.0F - curright ); \
)寻找弱分类器阈值函数
#define ICV_DEF_FIND_STUMP_THRESHOLD( suffix, type, error ) \
CV_BOOST_IMPL int icvFindStumpThreshold_##suffix( \
uchar* data, size_t datastep, \
uchar* wdata, size_t wstep, \
uchar* ydata, size_t ystep, \
uchar* idxdata, size_t idxstep, int num, \
float* lerror, \
float* rerror, \
float* threshold, float* left, float* right, \
float* sumw, float* sumwy, float* sumwyy ) \
{ \
int found = 0; \
float wyl = 0.0F; //左分支,各样本权重乘以类别y并求和 \
float wl = 0.0F; // 左分支各样本权重求和 \
float wyyl = 0.0F; // 左分支,各样本类别的平方乘以权重后求和 \
float wyr = 0.0F; //右分支,各样本权重乘以类别y并求和 \
float wr = 0.0F; // 右分支各样本权重求和 \
\
float curleft = 0.0F; //左分支,正样本权重和/总的权重和 \
float curright = 0.0F; //右分支,正样本权重和/总的权重和 \
float* prevval = NULL; \
float* curval = NULL; \
float curlerror = 0.0F; //左分支,的熵 \
float currerror = 0.0F; //右分支,的熵 \
float wposl; // 分配到左分支的正样本权重和 \
float wposr; //分配到右分支的正样本权重和 \
\
int i = 0; \
int idx = 0; \
\
wposl = wposr = 0.0F; \
if( *sumw == FLT_MAX ) \
{ \
/* calculate sums */ \
float *y = NULL; \
float *w = NULL; \
float wy = 0.0F; \
\
*sumw = 0.0F; \
*sumwy = 0.0F; \
*sumwyy = 0.0F; \
for( i = 0; i < num; i++ ) \
{ \
idx = (int) ( *((type*) (idxdata + i*idxstep)) ); \
w = (float*) (wdata + idx * wstep); \
*sumw += *w; //权重和 \
y = (float*) (ydata + idx * ystep); \
wy = (*w) * (*y); \
*sumwy += wy; //类别权重和 \
*sumwyy += wy * (*y); //当y=+1或-1时,此值同 sumw \
} \
} \
\
for( i = 0; i < num; i++ ) \
{ \
idx = (int) ( *((type*) (idxdata + i*idxstep)) ); \
curval = (float*) (data + idx * datastep); \
/* for debug purpose */ \
if( i > 0 ) assert( (*prevval) <= (*curval) ); \
\
wyr = *sumwy - wyl; \
wr = *sumw - wl; \
\
if( wl > 0.0 ) curleft = wyl / wl; \
else curleft = 0.0F; \
\
if( wr > 0.0 ) curright = wyr / wr; \
else curright = 0.0F; \
\
error \
\
if( curlerror + currerror < (*lerror) + (*rerror) ) \ 查找到使熵最小的阈值点
{ \
(*lerror) = curlerror; //左分支熵 \
(*rerror) = currerror; //右分支熵 \
*threshold = *curval; //阈值 \
if( i > 0 ) { \
*threshold = 0.5F * (*threshold + *prevval); \
} \
*left = curleft; // 左分支中,正样本(权重)占左分支总权重的比例 \
*right = curright; //右分支,正样本(权重)占右分支总权重的比例 \
found = 1; \
} \
\
do //计算左右权重和 \
{ \
wl += *((float*) (wdata + idx * wstep)); \
wyl += (*((float*) (wdata + idx * wstep))) \
* (*((float*) (ydata + idx * ystep))); \
wyyl += *((float*) (wdata + idx * wstep)) \
* (*((float*) (ydata + idx * ystep))) \
* (*((float*) (ydata + idx * ystep))); \
} \
while( (++i) < num && \
( *((float*) (data + (idx = \
(int) ( *((type*) (idxdata + i*idxstep))) ) * datastep)) \
== *curval ) ); \
--i; \
prevval = curval; \
} /* for each value */ \
\
return found; \
}
2.3 Stage 生成
某个CART弱分类器创建完成,然后根据adaboost权重更新规则,计算此弱分类器的 αi ,在DAB(Discrete AdaBoost)模式下,左右分支节点输出便是预测值与 αi 的乘积。
Stage内弱分类器的个数,由maxfalsealarm确定。如果一直达不到小于maxfalsealarm的要求,则需要训练更多的弱分类器放入Stage中。
Stage的 阈值由minhitrate确定。多个弱分类器的联合(即强分类器)对正样本的预测概率不能小于minhitrate。
2.4 几个问题说明
1,为什么训练过程中经常出现卡死,无法进入下一个stage的情况?
假设参数输入时候的负样本个数为1000; 则每一级stage都需要从待选的所有负样本中获得1000个被上一级错分为正样本的负样本(体现为虚警率)。由于越往后虚警率越低,同样是获取1000个错分样本,后面需要遍历的负样本范围越来越大。当最终无法得到错分样本时,程序便进入死循环中。
static
int icvGetHaarTrainingData( CvHaarTrainingData* data, int first, int count,
CvIntHaarClassifier* cascade,
CvGetHaarTrainingDataCallback callback, void* userdata,
int* consumed, double* acceptance_ratio )
{
int i = 0;
ccounter_t getcount = 0;
ccounter_t thread_getcount = 0;
ccounter_t consumed_count;
ccounter_t thread_consumed_count;
/* private variables */
CvMat img;
CvMat sum;
CvMat tilted;
CvMat sqsum;
sum_type* sumdata;
sum_type* tilteddata;
float* normfactor;
/* end private variables */
assert( data != NULL );
assert( first + count <= data->maxnum );
assert( cascade != NULL );
assert( callback != NULL );
// if( !cvbgdata ) return 0; this check needs to be done in the callback for BG
CCOUNTER_SET_ZERO(getcount);
CCOUNTER_SET_ZERO(thread_getcount);
CCOUNTER_SET_ZERO(consumed_count);
CCOUNTER_SET_ZERO(thread_consumed_count);
#ifdef CV_OPENMP
#pragma omp parallel private(img, sum, tilted, sqsum, sumdata, tilteddata, \
normfactor, thread_consumed_count, thread_getcount)
#endif /* CV_OPENMP */
{
sumdata = NULL;
tilteddata = NULL;
normfactor = NULL;
CCOUNTER_SET_ZERO(thread_getcount);
CCOUNTER_SET_ZERO(thread_consumed_count);
int ok = 1;
img = cvMat( data->winsize.height, data->winsize.width, CV_8UC1,
cvAlloc( sizeof( uchar ) * data->winsize.height * data->winsize.width ) );
sum = cvMat( data->winsize.height + 1, data->winsize.width + 1,
CV_SUM_MAT_TYPE, NULL );
tilted = cvMat( data->winsize.height + 1, data->winsize.width + 1,
CV_SUM_MAT_TYPE, NULL );
sqsum = cvMat( data->winsize.height + 1, data->winsize.width + 1, CV_SQSUM_MAT_TYPE,
cvAlloc( sizeof( sqsum_type ) * (data->winsize.height + 1)
* (data->winsize.width + 1) ) );
#ifdef CV_OPENMP
#pragma omp for schedule(static, 1)
#endif /* CV_OPENMP */
for( i = first; (i < first + count); i++ )
{
if( !ok )
continue;
for( ; ; ) //当没有合适的负样本时,陷入死循环
{
ok = callback( &img, userdata );
if( !ok )
break;
CCOUNTER_INC(thread_consumed_count);
sumdata = (sum_type*) (data->sum.data.ptr + i * data->sum.step);
tilteddata = (sum_type*) (data->tilted.data.ptr + i * data->tilted.step);
normfactor = data->normfactor.data.fl + i;
sum.data.ptr = (uchar*) sumdata;
tilted.data.ptr = (uchar*) tilteddata;
icvGetAuxImages( &img, &sum, &tilted, &sqsum, normfactor );
if( cascade->eval( cascade, sumdata, tilteddata, *normfactor ) != 0.0F )//读取正样本时,有可能小于正样本个数;
//读取负样本时,反应的是错分为正样本的个数
{
CCOUNTER_INC(thread_getcount);
break;
}
}
#ifdef CV_VERBOSE
if( (i - first) % 500 == 0 )
{
fprintf( stderr, "%3d%%\r", (int) ( 100.0 * (i - first) / count ) );
fflush( stderr );
}
#endif /* CV_VERBOSE */
}
cvFree( &(img.data.ptr) );
cvFree( &(sqsum.data.ptr) );
#ifdef CV_OPENMP
#pragma omp critical (c_consumed_count)
#endif /* CV_OPENMP */
{
/* consumed_count += thread_consumed_count; */
CCOUNTER_ADD(getcount, thread_getcount);
CCOUNTER_ADD(consumed_count, thread_consumed_count);
}
} /* omp parallel */
if( consumed != NULL )
{
*consumed = (int)consumed_count;
}
if( acceptance_ratio != NULL )
{
/* *acceptance_ratio = ((double) count) / consumed_count; */
*acceptance_ratio = CCOUNTER_DIV(count, consumed_count); // 计算虚警率
}
return static_cast<int>(getcount);
}2,负样本是怎么截取的?
将输入图像等比例缩小到最小尺寸(不小于样本尺寸),然后再逐渐放大至原始尺寸。期间,用样本同样大小(width,height)的窗口滑动(步长为width/2,height/2 ),截取负样本。