ROS学习笔记(三)补充篇pionner3 DX -win平台下开发
资料整理:
官网资料 http://www.mobilerobots.com/ResearchRobots/PioneerP3DX.aspx
控制面板LED灯的说明:
PWR当显示红色灯的时候,说明主电源正在给机器人供电
STAT灯的状态决定于当前的模式:
当STAT慢速闪烁的时候:说明控制器正在等待与客户机相连,快速闪烁的时候说明当前处于摇杆驱动模式,或者已经与客户机进行连接,当中速闪烁的时候,说明处于维护状态
我觉得这个时候计算机应该是处于维护状态



按一下这个按钮可以打开电机
再按一下这个按钮可以关闭电机,按下这个白色的按钮不送开,然后按下,并且松开红色的按钮可以松开白色的按钮可以进入维护模式
红色的Reset按钮为无条件控制复位按键
AUX1是提供5V的直流电源,给各个附件
慢速闪烁才是进入了维护模式
然后按
能够更新一下硬件
可老师给的提示:
更新硬件,熟悉API
现在visual studio中运作实习之后再
检索主页:
http://robots.mobilerobots.com/wiki/Main_Page
先锋系列机器人外形特征的介绍,参考网站:
http://www.mobilerobots.com/ResearchRobots/ResearchMatrix.aspx
关于安装顺序
1.请首先安装”BaseArnl”文件,再安装”ARNL”及”ARIA”,其他软件可以按需要进行安装;
2.”Mapper3” 为地图编辑器,允许用户自行绘制地图用于虚拟测试,通常配合”MobileSim”使用;
3.”MobileEyes”允许用户连接至声呐设备,并且根据读数绘制周围环境地图;
关于ARIA
MobileRobots' Advanced Robot Interface for Applications (ARIA) is a C++ library (software development toolkit or SDK) for all MobileRobots/ActivMedia platforms. ARIA can dynamically control your robot's velocity, heading, relative heading, and other motion parameters either through simple low-level commands or through its high-level Actions infrastructure. ARIA also receives position estimates, sonar readings, and all other current operating data sent by the robot platform.ARIA是为MobileRobots开发的,面向对象的,用于机器人控制的应用程序接口系统。该系统基于C++语言,是一个可以简单、方便的用于先锋系列机器人的运动控制以及传感器操作的客户端软件。该软件具有强大的功能和适应性,是机器人高端软件编写的理想选择,包括MobileSim在内的先锋机器人基本软件系统都是以ARIA为基础的。
参考网站:
http://robots.mobilerobots.com/wiki/ARIA
Mobilesim
MobileSim is software for simulating MobileRobots/ActivMedia platforms and their environments, for debugging and experimentation with ARIA. It replaces SRIsim previously distributed with ARIA.
参考地址:http://robots.mobilerobots.com/wiki/MobileSim
ARNL network
里面可能包含计算机之间通信的东西,所以我决定动一动

基础的一些库,以及激光雷达的库都在这个里面,然后还是选择的安装了一下
参考链接地址:
http://robots.mobilerobots.com/wiki/ARNL#Windows_64-bit
Mapper 3
作为新手建议都是默认路径安装
http://robots.mobilerobots.com/wiki/Mapper3
下面更新一定点Mapper3的教程
mapper3会创建二维的激光雷达的地图
首先这个软件是可以自己获得地图的,可以通过MobileEyes来获得,获得的地图是有定的格式。
同时也可以让用户自己手动绘制地图。将手动绘制的地图加载的Mobilesim当中
激光雷雷达获得数据会保存到一个后缀名为.2d的文件当中,用Mapper打开2d文件,会自动重新生成一个后缀名为.map的文件






总算画好了205的地图

关于这个建的图的一点说明
激光雷达的型号

激光雷达的(LMS)
也可以用激光雷达进行建图。
MobileEyes


打开顺序:


实践部分:
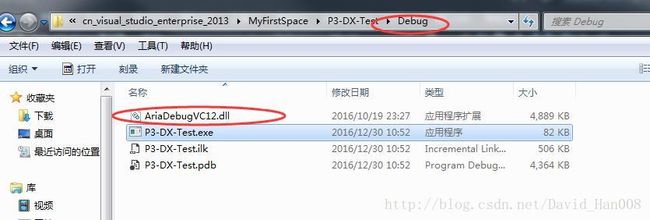
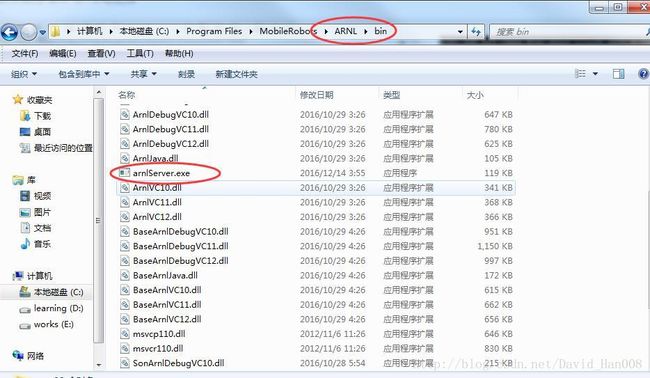
编程环境的搭建以及测试程序



再在bin目录下,找到AriaDebugVC12.dll

然后将它复制一份放到工程的debug的目录下面
然后找到官方的API说明
打开之后,
copy一下示例程序
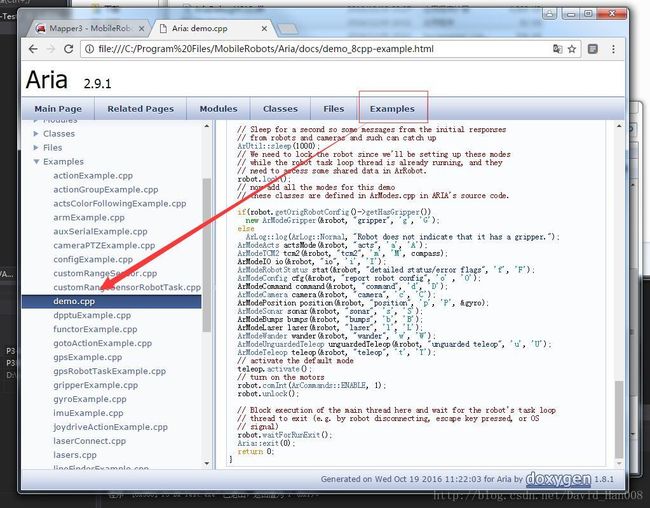
然后调制一下,没什么错机可以啦
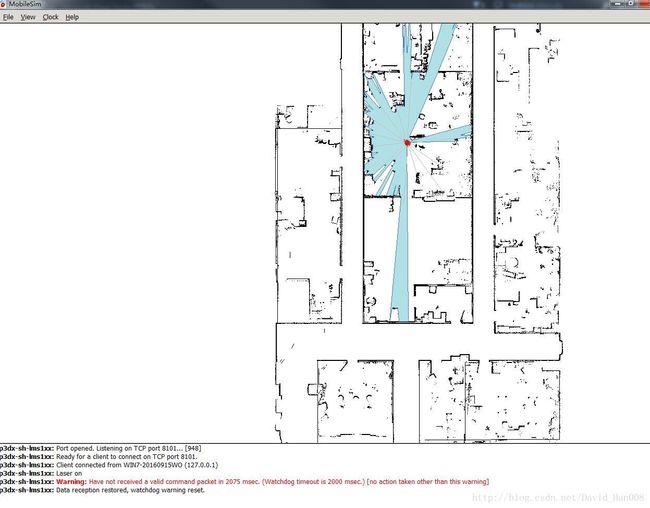
开始运行一个仿真软件


在这个目录下面是有一些的地图的
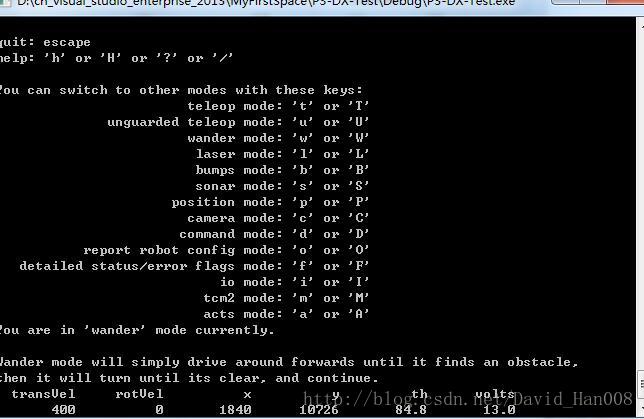
然后按W可以随机行走
停止按空格键
退出按ESC
也就是是说,只要把之间槽有电池,就可以了。
AUX1和AUX2是用来干什么的?
motors是用来测试电机
我们接着继续,找一根USB转串口线,然后连接上,然后这个时候,电脑会提示没有办法安装驱动,那么去百度上找安装驱动,直接根据提示的报错


因为先锋机器人是在的demo程序中默认的COM口是COM1,所以需要到设备管理器吧对应的com口改成com1
实测可用

然后回到visual stdio里面就可以用你的电脑来操控了。
运行的时候的截图:

tip: 可以直接将 .exe 文件拖到DOS命令窗口进行执行。
其实我们可以不用里面工控机,可以直接用工控机装串口。
源码的分析:
http://robots.mobilerobots.com/docs/api/ARIA/2.9.1/docs/classAr3DPoint.html
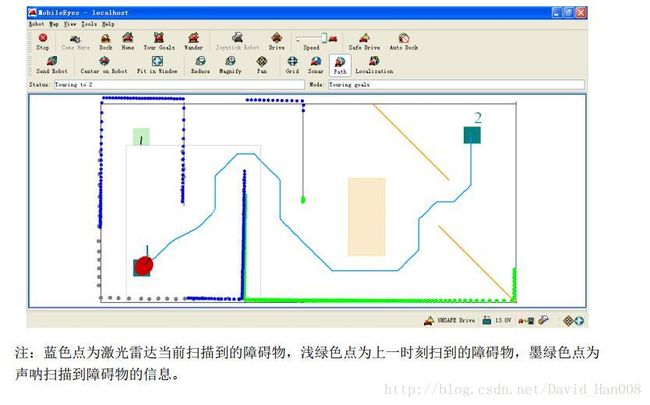
使用mobilesim和Mobileeye进行仿真
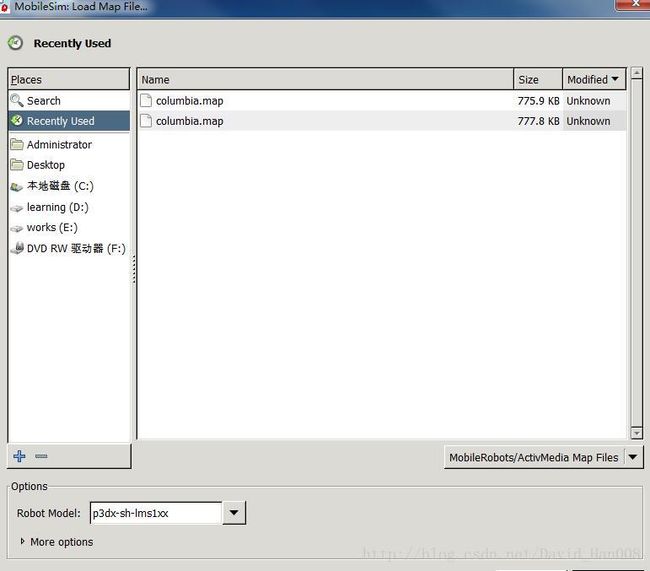


注意:这里还需要导入一下地图


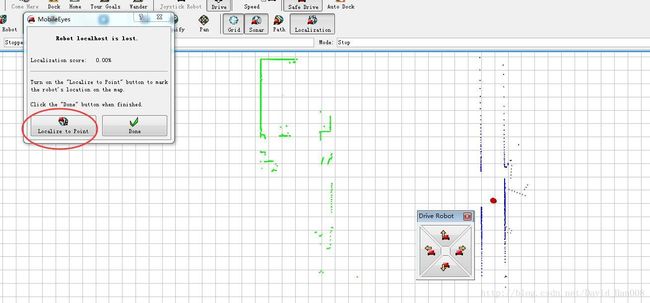
这个按钮可以重新进行定位
这个按钮可以直接让机器人去我想去的位置
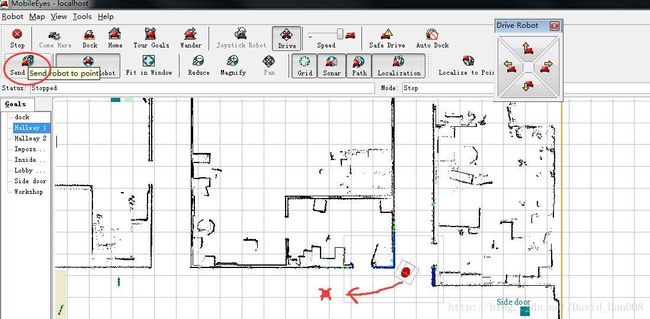
这个按钮让机器人

ware就是随便走走
path按钮显示打算的运动轨迹
tour是自己设置的目标点
配置实验室205的地图
1、我们用 然后按上下左右键控制小车进行建图
然后按上下左右键控制小车进行建图
建好的地图

然后在地图里面添加homepoint点,然后让机器人移动到homepoint点上,作为初始位置的点,因为机器人需要localpoint,建立地图和实际地图的匹配程度,只有匹配程度比较好,导航的效果才回更好,
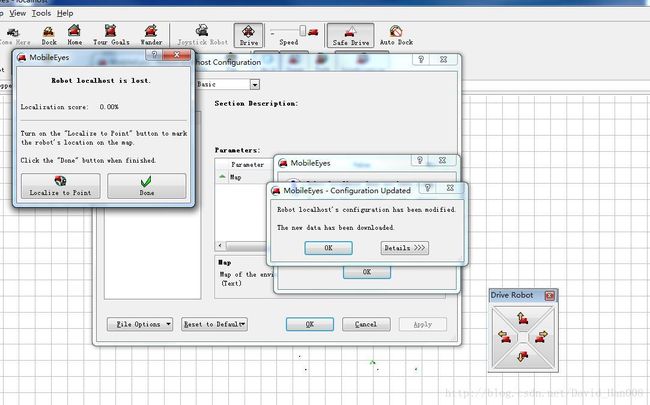
然后打开
然后在开启MobileEYE,在tool俩面有个Robtconfignation重新加载地图,
将建立好的地图放在ARNL的example的目录下,就可以成功导入,成功导入之后定位一下,这里会有一个标准,如果定位的标准到底50%以上的话,基本上就可以进行导航了,设置目标点,然后就可以的。
后记
建议,尽量别动先锋机器人出厂安装的软件。最好不用动版本问题。
我用过最新的版本,但是是没有办法跑动通的。
无奈只能用老的版本,最后备份一下我的先锋机器人的版本
