进程的控制与同步---经典同步问题
一、生产者 -- 消费者问题(互斥、同步)
1、问题:多个生产者和消费者对n个缓冲区的使用。
2、解决关键:1)互斥: 生产者与生产者之间、消费者与消费者之间互斥使用缓冲区,通过互斥信号量mutex来实现。
2)交叉有序:生产者与消费者间交叉有序 。分别针对生产者、消费者设置不同信号量,资源信号量empty和full分别表示缓冲池中空缓冲池和满缓冲池(即产品)的数量。 在empty、full 在值等于0上是控制顺序的关键。
3、实现
1)信号量 Var mutex,empty,full: semaphore: = 1,n,0;
producer :
repeat
…
produce an item in nexp;
…
buffer(in):=nexp;
in:=(in+1) mod n;
until false;
consumer :
repeat
nextc:=buffer(out);
out:=(out+1) mod n;
consume the item in nexc;
until false;
2)AND信号量的方式
consumer :
repeat
nextc:=buffer(out);
out:=(out+1) mod n;
consume the item in nexc;
until false;
二、 哲学家就餐问题(互斥、死锁)
1、问题:五个哲学家共用一张圆桌,分别坐在周围的五张椅子上,在桌子上有五只碗和五只筷子,他们的生活方式是交替地进行思考和进餐。平时,一个哲学家进行思考,饥饿时便试图取用其左右最靠近他的筷子,只有在他拿到两只筷子时才能进餐。进餐毕,放下筷子继续思考。
2、问题分析:筷子是临界资源,在一段时间内只允许一个哲学家使用。为实现对筷子的互斥使用,用一个信号量表示一只筷子,五个信号量构成信号量数组。 Var chopstick: array [0, …, 4] of semaphore; 所有信号量均被初始化为1。
注:相邻两位不能同时进餐;最多只能有两人同时进餐。假如五位哲学家同时饥饿而各自拿起左边的筷子时,就会使五个信号量chopstick均为0,当他们再试图去拿右边的筷子时,都将因无筷子可拿而无限等待 ==》死锁。
3、解决思路
1)数量控制:至多只允许有四位哲学家同时去拿左边的筷子,最终能保证至少有一位哲学家能够进餐,并在用毕后释放出他用过的两只筷子,从而使更多的哲学家能够进餐。---利用信号量计数
void main()
{
seamphore chopstick[5]=1;
seamphore eat=4; //利用信号量实现计数
for(i=0;i<5;i++)
cobegin p(i);
}
void p(i){
while(true){
wait(eat);
wait(chopstick[i]);
wait(chopstick[(i+1)mod 5]);
...
eat;
...
signal(chopstick[i]);
signal(chopstick[(i+1)mod 5]);
signal(eat);
...
think;
}
}
2)一刀切:仅当哲学家的左右两只筷子均可用时,才允许他拿起筷子进餐。---采用AND信号量
Var chopstick: array [0, …, 4] of semaphore:=(1, 1, 1, 1, 1);
Process i
repeat
think;
Swait(chopstick[ ( i +1) mod 5] , chopstick[ i ] );
eat;
Ssignal(chopstick[ ( i +1) mod 5] , chopstick[ i ] );
until false;
3)规定奇数号哲学家先拿他左边的筷子,然后再去拿右边的筷子;偶数号哲学家则相反。保证总会有一个哲学家能同时获得两只筷子而进餐。---if编程控制
if I mod 2=0
…
else
…
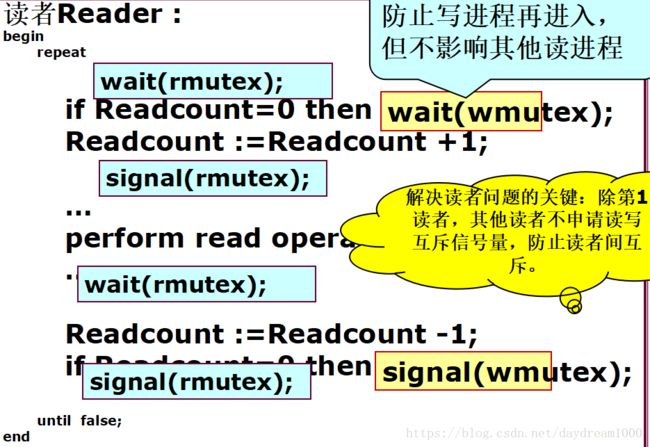
三、读者——写者问题(有条件的互斥)
1、问题:一个数据文件被多个进程共享。Reader进程只要求读文件,Writer进程要求写入内容。
2、分析:多个读进程可同时读; Writer进程与任何其他进程(包括Reader进程或其他Writer进程)不允许同时访问文件。
3、实现
写者操作要和其他的都互斥,所以必要判断互斥信号量, 没有变化:
Writer :
repeat
wait(wmutex);
写入文件;
signal(wmutex);
until false;
只有第一个读进程进行互斥判断;只要有一个“读进程”在读就不释放,“写进程”就不能写。(读者优先)