opencv_滤波
滤波
- 概述
- 滤波
- 滤波&模糊
- 线性滤波&非线性滤波
- 各种滤波对比
- 方框滤波
- C++
- Python
- 结果
- 均值滤波
- C++
- Python
- 结果
- 高斯滤波
- C++
- Python
- 结果
- 中值滤波
- C++
- Python
- 结果
- 双边滤波
- C++
- Python
- 结果
- 整体代码_Python
- 可能遇到问题&解决方案
- 参考文献
概述
滤波
将信号特定波段频率滤除,可以抑制和防止干扰。在滤波的过程中即要消除噪声,又要抽出对象的特征。有方框滤波、均值滤波、高斯滤波三种线性滤波及中值滤波、双边滤波两种非线性滤波。
滤波&模糊
滤波可以分为低通滤波和高通滤波。低通是模糊,高通是锐化。
线性滤波&非线性滤波
线性滤波:每个像素的输出值是一些输入像素的加权和,线性滤波器易于构造,并且易于从频率响应角度来进行分析。
非线性滤波:比如在噪声是散粒噪声而不是高斯噪声,即图像偶尔会出现很大的值的时候。在这种情况下,用线性滤波器对图像进行模糊的话,噪声像素是不会被去除的,它们只是转换为更为柔和但仍然可见的散粒。
各种滤波对比
方框滤波:使用方框滤波器模糊图片,方框滤波和均值滤波比较相似。
均值滤波:采用线性的方法,将一个窗口区域中的像素计算平均值,然后将窗口中计算得到的均值设置为锚点上的像素值。优点在于效率高,思路简单。缺点在于不能很好地保护图像特征,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊,不能很好地去除噪声点。对高斯噪声表现较好,对椒盐噪声表现较差。
高斯滤波 :可以消除高斯噪声,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,是通过与周围的点经过加权平均得到。就是图像与正态分布做卷积。
中值滤波:用像素点邻域灰度值的中值代替像素的灰度值,该方法去除椒盐噪声、脉冲噪声又同时保留图像的边缘细节。 对于斑点噪声(speckle noise)和椒盐噪声(salt-and-pepper noise)来说尤其有用。在一定的条件下可以克服常见线性滤波器如最小均方滤波、方框滤波器、均值滤波等带来的图像细节模糊,而且对滤除脉冲干扰及图像扫描噪声非常有效,也常用于保护边缘信息, 保存边缘的特性使它在不希望出现边缘模糊的场合也很有用,是非常经典的平滑噪声处理方法。
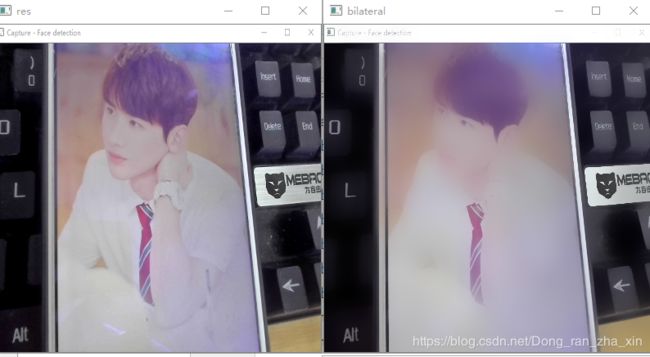
双边滤波 :结合图像的空间领域和像素相似度,进行去燥。 可以很好的保留边缘信息。对于彩色图像里的高频噪声,双边滤波器不能够干净的滤掉,只能够对于低频信息进行较好的滤波。
中值滤波与均值滤波器比较:
中值滤波器与均值滤波器比较的优势:在均值滤波器中,由于噪声成分被放入平均计算中,所以输出受到了噪声的影响,但是在中值滤波器中,由于噪声成分很难选上,所以几乎不会影响到输出。因此同样用3x3区域进行处理,中值滤波消除的噪声能力更胜一筹。中值滤波无论是在消除噪声还是保存边缘方面都是一个不错的方法。
中值滤波器与均值滤波器比较的劣势:中值滤波花费的时间是均值滤波的5倍以上。
滤波结果
注:
1、椒盐噪声类似于向照片上撒的椒盐。
2、使用滤波函数时需要根据实际情况修改内核大小、内核是否被其区域归一化等参数。
3、均值滤波&高斯滤波&中值滤波优化方案(可以在保证效果的前提下,缩短大量时间)参考:
https://blog.csdn.net/tengfei461807914/article/details/83626123
方框滤波
C++
函数调用:
C++: void boxFilter(InputArray src,OutputArray dst, int ddepth, Size ksize, Point anchor=Point(-1,-1), boolnormalize=true, int borderType=BORDER_DEFAULT )
参数详解如下:
第一个参数InputArray src:InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。该函数对通道是独立处理的,且可以处理任意通道数的图片,但需要注意,待处理的图片深度应该为CV_8U, CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
第二个参数OutputArray dst:OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
第三个参数int ddepth:,int类型的ddepth,输出图像的深度,-1代表使用原图深度,即src.depth()。
第四个参数Size ksize:Size类型的ksize,内核的大小。一般这样写Size( w,h )来表示内核的大小( 其中,w 为像素宽度, h为像素高度)。Size(3,3)就表示3x3的核大小,Size(5,5)就表示5x5的核大小
第五个参数 Point anchor=Point(-1,-1):Point类型的anchor,表示锚点(即被平滑的那个点),注意他有默认值Point(-1,-1)。如果这个点坐标是负值的话,就表示取核的中心为锚点,所以默认值Point(-1,-1)表示这个锚点在核的中心。
第六个参数boolnormalize=true:bool类型的normalize,默认值为true,一个标识符,表示内核是否被其区域归一化(normalized)了。
第七个参数int borderType=BORDER_DEFAULT:int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT。
实际应用:
//内核大小
int g_nBoxFilterValue = 3;
//方框滤波操作
boxFilter(g_srcImage, g_dstImage1, -1, Size(g_nBoxFilterValue + 1, g_nBoxFilterValue + 1));
Python
函数调用:
cv2.boxFilter(src, ddepth, ksize[, dst[, anchor[, normalize[, borderType]]]]) → dst
参数详解如下:
src - 输入图像。
dst - 输出与src相同大小和类型的图像。
ddepth - 输出图像深度(-1)。
ksize - 模糊内核大小。
anchor - 锚点; 默认值Point(-1,-1)表示锚点位于内核中心。
normalize - flag,指定内核是否按其区域进行规范化。
borderType - 用于外推图像外部像素的边框模式。
实际应用-----Python:
# 方框滤波
box = cv2.boxFilter(img, -1, (3, 3), normalize=True)
box_1 = cv2.boxFilter(img, -1, (3, 3), normalize=False)
结果

均值滤波
C++
函数调用:
C++: void blur(InputArray src, OutputArraydst, Size ksize, Point anchor=Point(-1,-1), int borderType=BORDER_DEFAULT )
参数详解如下:
第一个参数InputArray src:InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。该函数对通道是独立处理的,且可以处理任意通道数的图片,但需要注意,待处理的图片深度应该为CV_8U, CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
第二个参数OutputArray dst:OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。比如可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
第三个参数Size ksize:Size类型(对Size类型稍后有讲解)的ksize,内核的大小。一般这样写Size( w,h )来表示内核的大小( 其中,w 为像素宽度, h为像素高度)。Size(3,3)就表示3x3的核大小,Size(5,5)就表示5x5的核大小
第四个参数Point anchor=Point(-1,-1):Point类型的anchor,表示锚点(即被平滑的那个点),注意他有默认值Point(-1,-1)。如果这个点坐标是负值的话,就表示取核的中心为锚点,所以默认值Point(-1,-1)表示这个锚点在核的中心。
第五个参数 int borderType=BORDER_DEFAULT:int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT。
实际应用:
//中值滤波操作
blur(g_srcImage, g_dstImage2, Size(g_nMeanBlurValue + 1, g_nMeanBlurValue + 1), Point(-1, -1));
Python
函数调用:
cv2.blur(src, ksize[, dst[, anchor[, borderType]]]) → dst
参数详解如下:
src - 输入图像。
dst - 输出与src相同大小和类型的图像。
ksize - 模糊内核大小。
anchor - 锚点; 默认值Point(-1,-1)表示锚点位于内核中心。
normalize - flag,指定内核是否按其区域进行规范化。
borderType - 用于外推图像外部像素的边框模式。
实际应用:
# 均值滤波
mean = cv2.blur(img, (3, 3))
结果

高斯滤波
C++
函数调用:
C++: void GaussianBlur(InputArray src,OutputArray dst, Size ksize, double sigmaX, double sigmaY=0, intborderType=BORDER_DEFAULT )
参数详解如下:
第一个参数InputArray src:InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。它可以是单独的任意通道数的图片,但需要注意,图片深度应该为CV_8U,CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
第二个参数OutputArray dst:OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。比如可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
第三个参数Size ksize:Size类型的ksize高斯内核的大小。其中ksize.width和ksize.height可以不同,但他们都必须为正数和奇数。或者,它们可以是零的,它们都是由sigma计算而来。
第四个参数double sigmaX:double类型的sigmaX,表示高斯核函数在X方向的的标准偏差。
第五个参数double sigmaY=0:double类型的sigmaY,表示高斯核函数在Y方向的的标准偏差。若sigmaY为零,就将它设为sigmaX,如果sigmaX和sigmaY都是0,那么就由ksize.width和ksize.height计算出来(有关详细信息,请查看注释); 为了完全控制结果,无论将来可能修改所有这些语义,建议指定所有ksize,sigmaX和sigmaY。
为了结果的正确性着想,最好是把第三个参数Size,第四个参数sigmaX和第五个参数sigmaY全部指定到。
第六个参数intborderType=BORDER_DEFAULT:int类型的borderType,用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_DEFAULT。
实际应用:
//高斯滤波操作
GaussianBlur(g_srcImage, g_dstImage3, Size(g_nGaussianBlurValue * 2 + 1, g_nGaussianBlurValue * 2 + 1), 0, 0);
Python
函数调用:
cv2.GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]]) → dst
参数详解:
src - 输入图像。
dst - 输出与src相同大小和类型的图像。
ksize - 模糊内核大小。
sigmaX -X方向的高斯核标准偏差。
sigmaY - Y方向的高斯核标准差。
borderType - 用于外推图像外部像素的边框模式。
实际应用:
# 高斯滤波
gaussian = cv2.GaussianBlur(img, (5, 5), 1)
结果

中值滤波
C++
函数调用:
C++: void medianBlur(InputArray src,OutputArray dst, int ksize)
参数详解如下:
第一个参数InputArray src:InputArray类型的src,函数的输入参数,填1、3或者4通道的Mat类型的图像;当ksize为3或者5的时候,图像深度需为CV_8U,CV_16U,或CV_32F其中之一,而对于较大孔径尺寸的图片,它只能是CV_8U。
第二个参数OutputArray dst:OutputArray类型的dst,即目标图像,函数的输出参数,需要和源图片有一样的尺寸和类型。我们可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
第三个参数int ksize:int类型的ksize,孔径的线性尺寸(aperture linear size),注意这个参数必须是大于1的奇数,比如:3,5,7,9 …
实际应用:
medianBlur( g_srcImage, out, 7);
Python
函数调用:
cv2.medianBlur(src, ksize[, dst]) → dst%ksize:表示必须是奇数
参数详解如下:
src - 输入图像。
dst - 输出与src相同大小和类型的图像。
ksize - 模糊内核大小,它必须是奇数且大于1。
实际应用-----Python:
# 中值滤波
median = cv2.medianBlur(img, 3)
结果

双边滤波
C++
函数调用:
C++: void bilateralFilter(InputArray src, OutputArray dst, int d, double sigmaColor, double sigmaSpace, int borderType=BORDER_DEFAULT)
参数详解如下:
第一个参数InputArray src:InputArray类型的src,输入图像,即源图像,需要为8位或者浮点型单通道、三通道的图像。
第二个参数OutputArray dst:OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
第三个参数int d:int类型的d,表示在过滤过程中每个像素邻域的直径。如果这个值我们设其为非正数,那么OpenCV会从第五个参数sigmaSpace来计算出它来。
第四个参数double sigmaColor:double类型的sigmaColor,颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
第五个参数double sigmaSpace:double类型的sigmaSpace坐标空间中滤波器的sigma值,坐标空间的标注方差。他的数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace。
第六个参数int borderType=BORDER_DEFAULT:int类型的borderType,用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_DEFAULT。
实际应用:
//双边滤波操作
bilateralFilter( image, out, 25, 25*2, 25/2 );( g_srcImage, out, 7);
Python
函数调用:
cv2.bilateralFilter(src,d,sigmaColor,sigmaspace)
参数详解:
src:原始图像
d:每个像素领域的直径
sigmaColor:颜色空间滤波器sigma的值,参数越大表明与邻域像素相关性越大 。
sigmaSpace:空间坐标中sigma的值,坐标方差大,表明越远的像素会相互影响。
实际应用:
#双边滤波
dst = cv2.bilateralFilter(src=image, d=0, sigmaColor=100, sigmaSpace=15)
结果
整体代码_Python
import cv2
import numpy as np
img = cv2.imread('image1.png')
res = cv2.resize(img,(400, 400), interpolation = cv2.INTER_CUBIC)
kernel = np.ones((5,5),np.uint8)
box_False = cv2.boxFilter(res, -1, (3, 3), normalize=False)
box_True = cv2.boxFilter(res, -1, (3, 3), normalize=True)
mean = cv2.blur(res, (3, 3))
gaussian = cv2.GaussianBlur(res, (5, 5), 1)
median = cv2.medianBlur(res, 3)
bilateral = cv2.bilateralFilter(res, d=0, sigmaColor=100, sigmaSpace=15)
cv2.imshow("res", res)
cv2.imshow("box_False", box_False)
cv2.imshow("box_True", box_True)
cv2.imshow("mean", mean)
cv2.imshow("gaussian", gaussian)
cv2.imshow("median", median)
cv2.imshow("bilateral", bilateral)
cv2.waitKey(0)
cv2.destroyAllWindows()
可能遇到问题&解决方案
问题1:0x00007FF8BAC31F28 处(位于 Project1.exe 中)有未经处理的异常: Microsoft C++
解决方案:把照片放到.cpp同文件夹下。
参考文献
[1] 执剑者罗辑.均值滤波和中值滤波[J/OL].2018-2-5.
https://blog.csdn.net/cjsh_123456/article/details/79261271
[2] 浅墨_毛星云.【OpenCV入门教程之八】线性邻域滤波专场:方框滤波、均值滤波与高斯滤波[J/OL].2014-4-1.
https://blog.csdn.net/poem_qianmo/article/details/22745559
[3] 浅墨_毛星云.【OpenCV入门教程之九】 非线性滤波专场:中值滤波、双边滤波[J/OL].2014-4-8.
https://blog.csdn.net/poem_qianmo/article/details/23184547
[4] 小白鼠丶coding.opencv:线性和非线性滤波[J/OL].2017-7-24.
https://blog.csdn.net/E01114255/article/details/75949687