图像处理---天空检测!
一、引言
天空区域作为图像中的背景信息,为机器人导航、自动驾驶等领域的图像理解提供了重要依据,因此如何检测图像中的天空区域非常重要,本文提供了一个基于传统视觉算法(非机器学习方法)的提取天空区域的方法,参考文献:https://journals.sagepub.com/doi/pdf/10.5772/56884
二、算法思路
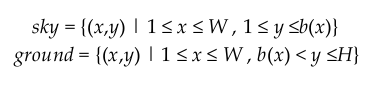
1.使用sobel算子为图像提取梯度信息图,从梯度信息图中根据给定阈值提取天空的边界线
![]()
于是,天空区域和地面区域可以表示如下:
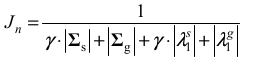
2.使用一个能量函数作为适应度函数,来优化提取天空边界线,当能量函数最大时,天空边界线最准确
3.通过检测边界线是否发生大的跳变来判断提取的天空区域包含大量建筑,若是,对天空区域进行聚类分析,分为两类,通过与非天空区域的马氏距离来得到真实的天空区域。
4.扫描每一列的像素,通过每一列像素与真实天空区域的马氏距离来判断该像素是否属于天空的像素,从而可以改善天空边界线
算法是这样假设的:
(1)图像中的天空区域在图像的上方
(2)天空区域的像素变化比较平滑
然而实际的城市道路中由于电线杆、红路灯杆等的存在,以及太阳、云彩的影响,会使得天空边界线的提取被阻挡。而且上述假设在很多情况下不成立。此外能量函数只是表明了同一区域的同质性,而实际图像内容的情况比这要复杂的多。
我的改进:
(1)对梯度图像进行阈值分割,可以使得天空的提取鲁棒性更强
(2)使用多项式拟合修正错误的边界线(只是一个实验性的想法)
(3)计算真实天空区域的像素的R、G、B均值,通过对每一列的像素的RGB各通道像素值与天空区域的RGB均值比较,可以得到更完整的天空边界线
三、代码实现
下面是我的python代码实现,写的不够好,大家适当参考吧,里面部分代码仅仅是为了实现论文中的算法而已。有些经过我改进后的函数,比如梯度信息提取函数,已经不需要再使用extract_border_optimal()函数了。
大家有什么问题、建议和更好的改进方法请留言评论,我将感激不尽。代码中增加了计算天空消失点的程序,当然通过天空区域判断消失点肯定没有通过车道线计算消失点的准确性更强,但是车道线的检测难度较大,这个问题留待以后再考虑吧!
import cv2
import os
import math
import time
import sys
import numpy as np
import matplotlib.pyplot as plt
from numba import jit
from scipy import spatial
from scipy.optimize import curve_fit
#加载原始图像
def load_image(image_file_path):
if not os.path.exists(image_file_path):
print("图像文件不存在!")
#sys.exit()
else:
img = cv2.imread(image_file_path)
if img is None:
print('读取图像失败!')
#sys.exit()
else:
return img
#提取图像天空区域
def extract_sky(src_image):
height, width = src_image.shape[0:2]
sky_border_optimal = extract_border_optimal(src_image)
border_correct = correct_border_polynomial(sky_border_optimal,src_image)
sky_exists = has_sky_region(sky_border_optimal, height / 30, height / 10, 5)
if sky_exists == 0:
print('没有检测到天空区域')
#sys.exit()
"""
if has_partial_sky_region(border_correct, width / 3):
border_new = refine_border(border_correct, src_image)
sky_mask = make_sky_mask(src_image, border_new,1)
return sky_mask, sky_exists
#sky_image = display_sky_region(src_image, sky_border_optimal)
"""
sky_mask = make_sky_mask(src_image, border_correct, 1)
return sky_mask, sky_exists
#检测图像天空区域
def detect(image_file_path, output_path):
#加载图像
src_image = load_image(image_file_path)
src_image = cv2.pyrDown(src_image)
#x, y = src_image.shape[0:2]
#src_image = cv2.resize(src_image, (int(2*y/3),int(2*x/3)), cv2.INTER_CUBIC)
#提取图像天空区域
sky_mask,sky_exists = extract_sky(src_image)
#制作掩码输出
tic = time.time()
height = src_image.shape[0]
width = src_image.shape[1]
"""
sky_image_full = np.zeros(src_image.shape, dtype= np.uint8)
for row in range(height):
for col in range(width):
if sky_mask[row, col] != 0:
sky_image_full[row, col, 0] = 0
sky_image_full[row, col, 1] = 0
sky_image_full[row, col, 2] = 255
sky_image = cv2.addWeighted(src_image, 1, sky_image_full, 1, 0)
"""
for row in range(height):
for col in range(width):
if sky_mask[row, col] != 0:
src_image[row, col, 0] = 0
src_image[row, col, 1] = 0
src_image[row, col, 2] = 255
cv2.imwrite(output_path, src_image)
toc = time.time()
print('display mask time: ',(toc - tic), 's')
print('图像检测完毕!')
#检测图像天空区域--批量
def batch_detect(image_dir, output_dir):
img_filelist = os.listdir(image_dir)
print('开始批量提取天空区域')
i = 1
for img_file in img_filelist:
src_img = load_image(image_dir + img_file)
src_img = cv2.pyrDown(src_img)
sky_mask,sky_exists = extract_sky(src_img)
if sky_exists == 0:
i += 1
cv2.imwrite(output_dir+img_file, src_img)
continue
height = src_img.shape[0]
width = src_img.shape[1]
#sky_image_full = np.zeros(src_img.shape,dtype= src_img.dtype)
for row in range(height):
for col in range(width):
if sky_mask[row, col] != 0:
src_img[row, col, 0] = 0
src_img[row, col, 1] = 0
src_img[row, col, 2] = 255
#sky_img = cv2.addWeighted(src_img, 1, sky_image_full, 1, 0)
cv2.imwrite(output_dir+img_file, src_img)
print('已提取完成第',i,'张')
i += 1
print('批量提取完毕')
#计算天空灭点
def compute_vanish(image_file_path):
# 加载图像
src_img = load_image(image_file_path)
src_img = cv2.pyrDown(src_img)
src_img = cv2.pyrDown(src_img)
height, width = src_img.shape[0:2]
# 计算天空边界线
sky_border_optimal = extract_border_optimal(src_img)
border_correct = correct_border_polynomial(sky_border_optimal, src_img)
# 判断是否存在天空
sky_exists = has_sky_region(border_correct, height / 30, height / 10, 5)
if sky_exists == 0:
#print('没有检测到天空区域')
#cv2.imwrite(output_path, src_img)
return 2*(src_img.shape[0]//3)-15
# 计算天空消失点的高度,并画图
vanish_h = refine_vanishpoint(border_correct, src_img)
#cv2.circle(src_img, (src_img.shape[1]//2, vanish_h), 4, (0, 255, 0), 8)
#cv2.imwrite(output_path, src_img)
return 2*vanish_h
#计算天空灭点--批量
def batch_compute_vanish(image_dir, output_dir):
vanishs = []
img_filelist = sorted(os.listdir(image_dir))
print('开始批量计算天空灭点')
i = 1
for img_file in img_filelist:
#加载图像
src_image = load_image(image_dir + img_file)
src_img = cv2.pyrDown(src_image)
height, width = src_img.shape[0:2]
#计算天空边界线
sky_border_optimal = extract_border_optimal(src_img)
border_correct = correct_border_polynomial(sky_border_optimal, src_img)
#判断是否存在天空
sky_exists = has_sky_region(border_correct, height / 30, height / 10, 5)
if sky_exists == 0:
print('没有检测到天空区域')
i += 1
cv2.imwrite(output_dir + img_file, src_image)
continue
#计算天空消失点的高度,并画图
vanish_h = refine_vanishpoint(border_correct, src_img)
vanishs.append(2*vanish_h)
cv2.circle(src_image, (src_image.shape[1]//2, 4*vanish_h), 4, (0, 255, 0), 8)
cv2.imwrite(output_dir+img_file, src_image)
print('已计算完成第',i,'张')
i += 1
print('批量计算完毕')
return vanishs
#提取图像梯度信息
def extract_image_gradient(src_image):
#转灰度图像
gray_image = cv2.cvtColor(src_image, cv2.COLOR_BGR2GRAY)
#Sobel算子提取图像梯度信息
x_gradient = cv2.Sobel(gray_image, cv2.CV_64F, 1, 0, 3)
y_gradient = cv2.Sobel(gray_image, cv2.CV_64F, 0, 1, 3)
#计算梯度幅值
gradient_image = np.hypot(x_gradient, y_gradient)
ret, gradient_image = cv2.threshold(gradient_image, 40, 1000, cv2.THRESH_BINARY)
#gradient_image = np.uint8(np.sqrt(np.multiply(x_gradient,x_gradient) + np.multiply(y_gradient,y_gradient)))
return gradient_image
#利用能量函数优化计算计算天空边界线
def extract_border_optimal(src_image, thres_sky_min = 5, thres_sky_max = 600, thres_sky_search_step = 6):
#提取梯度信息图
gradient_info_map = extract_image_gradient(src_image)
n = math.floor((thres_sky_max - thres_sky_min)/ thres_sky_search_step) + 1
border_opt = None
jn_max = 0
for i in range(n + 1):
t = thres_sky_min + (math.floor((thres_sky_max - thres_sky_min) / n) - 1) * i
b_tmp = extract_border(gradient_info_map, t)
jn = calculate_sky_energy(b_tmp, src_image)
#print('threshold= ',t,'energy= ',jn)
if jn > jn_max:
jn_max = jn
border_opt = b_tmp
return border_opt
# 计算天空图像能量函数
def calculate_sky_energy(border, src_image):
# 制作天空图像掩码和地面图像掩码
sky_mask = make_sky_mask(src_image, border, 1)
ground_mask = make_sky_mask(src_image, border, 0)
# 扣取天空图像和地面图像
sky_image_ma = np.ma.array(src_image, mask = cv2.cvtColor(sky_mask, cv2.COLOR_GRAY2BGR))
ground_image_ma = np.ma.array(src_image, mask = cv2.cvtColor(ground_mask, cv2.COLOR_GRAY2BGR))
# 计算天空和地面图像协方差矩阵
sky_image = sky_image_ma.compressed()
ground_image = ground_image_ma.compressed()
sky_image.shape = (sky_image.size//3, 3)
ground_image.shape = (ground_image.size//3, 3)
sky_covar, sky_mean = cv2.calcCovarMatrix(sky_image, mean=None, flags=cv2.COVAR_ROWS|cv2.COVAR_NORMAL|cv2.COVAR_SCALE)
sky_retval, sky_eig_val, sky_eig_vec = cv2.eigen(sky_covar)
ground_covar, ground_mean = cv2.calcCovarMatrix(ground_image, mean=None,flags=cv2.COVAR_ROWS|cv2.COVAR_NORMAL|cv2.COVAR_SCALE)
ground_retval, ground_eig_val, ground_eig_vec = cv2.eigen(ground_covar)
gamma = 2 # 论文原始参数
sky_det = cv2.determinant(sky_covar)
#sky_eig_det = cv2.determinant(sky_eig_vec)
ground_det = cv2.determinant(ground_covar)
#ground_eig_det = cv2.determinant(ground_eig_vec)
sky_energy = 1 / ((gamma * sky_det + ground_det) + (gamma * sky_eig_val[0,0] + ground_eig_val[0,0]))
return sky_energy
# 判断图像是否存在天空区域
def has_sky_region(border, thresh_1, thresh_2, thresh_3):
border_mean = np.average(border)
#求天际线位置差,取绝对值,取均值
border_diff_mean = np.average(np.absolute(np.diff(border)))
sky_exists = 0
if border_mean < thresh_1 or (border_diff_mean > thresh_3 and border_mean < thresh_2):
return sky_exists
else:
sky_exists = 1
return sky_exists
#判断图像是否有部分区域为天空区域
def has_partial_sky_region(border, thresh_4):
border_diff = np.diff(border)
'''
if np.any(border_diff > thresh_4):
index = np.argmax(border_diff)
print(border_diff[index])
'''
return np.any(border_diff > thresh_4)
#计算天空边界线
def extract_border(gradient_info_map, thresh):
height, width = gradient_info_map.shape[0:2]
border = np.full(width, height - 1)
for col in range(width):
#返回该列第一个大于阈值的元素的索引
border_pos = np.argmax(gradient_info_map[:, col] > thresh)
if border_pos > 0:
border[col] = border_pos
return border
#天空区域和原始图像融合图,显示天空区域
def display_sky_region(src_image, border):
height = src_image.shape[0]
width = src_image.shape[1]
#制作天空图掩码
sky_mask = make_sky_mask(src_image, border, 1)
#天空和原始图像融合
sky_image_full = np.zeros(src_image.shape, dtype = src_image.dtype)
for row in range(height):
for col in range(width):
if sky_mask[row, col] != 0:
src_image[row, col, 0] = 0
src_image[row, col, 1] = 0
src_image[row, col, 2] = 255
sky_image = cv2.addWeighted(src_image, 1, sky_image_full, 1, 0)
return sky_image
#制作天空掩码图像,type: 1: 天空 0: 地面
def make_sky_mask(src_image, border, type):
height = src_image.shape[0]
width = src_image.shape[1]
mask = np.zeros((height,width),dtype= np.uint8)
if type == 1:
for col, row in enumerate(border):
mask[0:row +1, col] = 255
elif type == 0:
for col, row in enumerate(border):
mask[row + 1:, col] = 255
else:
assert type is 0 or type is 1,'type参数必须为0或1'
return mask
#改善天空边界线
def refine_border(border, src_image):
sky_covar, sky_mean, ic_s, ground_covar, ground_mean, ic_g = true_sky(border, src_image)
for col in range(src_image.shape[1]):
cnt = np.sum(np.greater(spatial.distance.cdist(src_image[0:border[col], col], sky_mean, 'mahalanobis', VI=ic_s), spatial.distance.cdist(src_image[0:border[col], col], ground_mean, 'mahalanobis', VI=ic_g)))
if cnt < (border[col] / 2):
border[col] = 0
return border
#改善天空边界线————alpha版本
def refine_border_alpha(border, src_image):
sky_covar, sky_mean, ic_s, ground_covar, ground_mean, ic_g = true_sky(border, src_image)
for col in range(src_image.shape[1]):
for row in range(src_image.shape[0]):
mahalanobis_sky = spatial.distance.cdist(src_image[row, col].reshape(1, 3), sky_mean, 'mahalanobis',VI=ic_s)
mahalanobis_gr = spatial.distance.cdist(src_image[row, col].reshape(1, 3), ground_mean, 'mahalanobis',VI=ic_g)
delta1 = abs(src_image[row, col, 0] - sky_mean[0,0]) < sky_mean[0,0] / 3.6
delta2 = abs(src_image[row, col, 1] - sky_mean[0,1]) < sky_mean[0,1] / 3.6
delta3 = abs(src_image[row, col, 2] - sky_mean[0,2]) < sky_mean[0,2] / 3.6
if mahalanobis_sky < mahalanobis_gr and delta1 and delta2 and delta3:
border[col] = row
"""
sky_mean = np.mean(sky_image_true, axis= 0)
for col in range(width):
for row in range(height):
delta1 = abs(src_image[row,col,0] - sky_mean[0]) < sky_mean[0]/3.6
delta2 = abs(src_image[row,col,1] - sky_mean[1]) < sky_mean[1]/3.6
delta3 = abs(src_image[row,col,2] - sky_mean[2]) < sky_mean[2]/3.6
if delta1 and delta2 and delta3:
border[col] = row
"""
return border
#获取更真实天空像素和地面像素的均值、协方差及其逆
def true_sky(border, src_image):
#制作天空图像掩码和地面图像掩码
sky_mask = make_sky_mask(src_image, border, 1)
ground_mask = make_sky_mask(src_image, border, 0)
#扣取天空图像和地面图像
sky_image_ma = np.ma.array(src_image, mask = cv2.cvtColor(sky_mask, cv2.COLOR_GRAY2BGR))
ground_image_ma = np.ma.array(src_image, mask = cv2.cvtColor(ground_mask, cv2.COLOR_GRAY2BGR))
#将天空和地面区域shape转换为n*3
sky_image = sky_image_ma.compressed()
ground_image = ground_image_ma.compressed()
sky_image.shape = (sky_image.size//3, 3)
ground_image.shape = (ground_image.size//3, 3)
# k均值聚类调整天空区域边界--2类
sky_image_float = np.float32(sky_image)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0)
flags = cv2.KMEANS_RANDOM_CENTERS
compactness, labels, centers = cv2.kmeans(sky_image_float, 2, None, criteria, 10, flags)
sky_label_0 = sky_image[labels.ravel() == 0]
sky_label_1 = sky_image[labels.ravel() == 1]
sky_covar_0, sky_mean_0 = cv2.calcCovarMatrix(sky_label_0, mean= None, flags= cv2.COVAR_ROWS + cv2.COVAR_NORMAL + cv2.COVAR_SCALE)
sky_covar_1, sky_mean_1 = cv2.calcCovarMatrix(sky_label_1, mean= None, flags= cv2.COVAR_ROWS + cv2.COVAR_NORMAL + cv2.COVAR_SCALE)
ground_covar, ground_mean = cv2.calcCovarMatrix(ground_image, mean= None, flags= cv2.COVAR_ROWS + cv2.COVAR_NORMAL + cv2.COVAR_SCALE)
ic_s0 = cv2.invert(sky_covar_0, cv2.DECOMP_SVD)[1]
ic_s1 = cv2.invert(sky_covar_1, cv2.DECOMP_SVD)[1]
ic_g = cv2.invert(ground_covar, cv2.DECOMP_SVD)[1]
#推断真实的天空区域
if cv2.Mahalanobis(sky_mean_0, ground_mean, ic_s0) > cv2.Mahalanobis(sky_mean_1, ground_mean, ic_s1):
sky_mean = sky_mean_0
sky_covar = sky_covar_0
ic_s = ic_s0
else:
sky_mean = sky_mean_1
sky_covar = sky_covar_1
ic_s = ic_s1
return sky_covar,sky_mean,ic_s,ground_covar, ground_mean,ic_g
#修正天空灭点
def refine_vanishpoint(border,src_image):
src_image = cv2.GaussianBlur(src_image, (7,7), 0)
index = np.argmax(border)
if border[index] >= 3*(src_image.shape[0]//4):
dist = np.full(border[index], 0)
width = src_image.shape[1]
sky_covar,sky_mean,ic_s,ground_covar, ground_mean,ic_g = true_sky(border, src_image)
for row in range(border[index]):
distance = spatial.distance.cdist(src_image[width // 2, row].reshape(1, 3), sky_mean, 'mahalanobis',VI=ic_s)
dist[row] = distance
diff1 = np.diff(dist)
diff2 = abs(np.diff(diff1))
vanish_h = np.argmax(diff2)
elif border[index] < src_image.shape[0]//2 :
dist = np.full(src_image.shape[0], 0)
width = src_image.shape[1]
sky_covar,sky_mean,ic_s,ground_covar, ground_mean,ic_g = true_sky(border, src_image)
for row in range(src_image.shape[0]):
distance = spatial.distance.cdist(src_image[width//2, row].reshape(1, 3), sky_mean, 'mahalanobis', VI=ic_s)
dist[row] = distance
diff1 = np.diff(dist)
diff2 = abs(np.diff(diff1))
vanish_h = np.argmax(diff2)
else:
vanish_h = border[index]
return vanish_h
#修正错误边界线--多项式拟合
def correct_border_polynomial(border, src_image):
x = np.arange(0, src_image.shape[1], 1)
border_line_argument = np.polyfit(x, border, 10)
border_line_function = np.poly1d(border_line_argument)
border_polynomial = np.int64(border_line_function(x))
outlier = np.percentile(border,90)
for col in range(len(border)):
if border[col] >= outlier: # or abs(border[col]-border_polynomial[col]) > src_image.shape[0]/3 :
border[col] = border_polynomial[col]
#elif border[col] <= src_image.shape[0]//3:
#border[col] = border_polynomial[col]
return border
'''
#修正错误边界线--二次函数拟合
def correct_border_quardratic(border, src_image):
outlier = np.percentile(border, 90)
for col in range(len(border)):
if border[col] >= outlier:
if col == 0:
border[col] = border[col + 1]
elif col == src_image.shape[1] - 1:
border[col] = border[col - 1]
else:
border[col] = (border[col - 1] + border[col + 1]) / 2
x = np.arange(0, src_image.shape[1], 1)
def fun(x,a,b,c):
return a*(x**2) + b*x +c
ppot,pcov = curve_fit(fun, x, border)
a = ppot[0]
b = ppot[1]
c = ppot[2]
border_new = np.int64(fun(x,a,b,c))
return border_new
'''
if __name__ == '__main__':
image_file_path = '/home/dulingwen/Pictures/skydetect/images/'
out_path = '/home/dulingwen/Pictures/skydetect/output/'
tic = time.time()
batch_compute(image_file_path, out_path)
toc = time.time()
times = 1000*(toc- tic)
print('运行时间:',times,'ms')