VS2013+Opencv2.4.9+大恒摄像头MER-1070-14U3M
1、材料
Opencv2.4.9已在VS2013中安装,1.1和1.2是已安装opencv计算机的状态:
1.1计算机配置Opencv时环境变量(x86对应32位编译器,X64对应64位编译器,
配置opencv时我两个都加了,这其实是多余的,也可以只选一个,这个对后面安装摄像头的X64还是X86的的lib有用):
C:\Program Files (x86)\openocd\0.6.0\bin;F:\opencv\build\x64\vc12\bin;F:\opencv\build\x86\vc12\bin

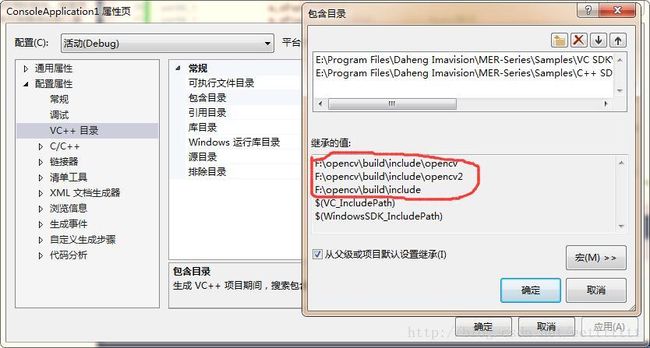
1.2 opencv在VS13的
(1)工程包含(include)目录配置。(2)工程库(lib)目录
(1)中内容:
(2)中内容(上面1.1中的环境变量配置了X64和X86下的bin,而下图的库目录里面选的是X64的话,则X86作废了,则在接下来的配置中摄像头lib就选X64,就像我的一样,如果你选了X86,则在接下来的配置中摄像头lib就选X86):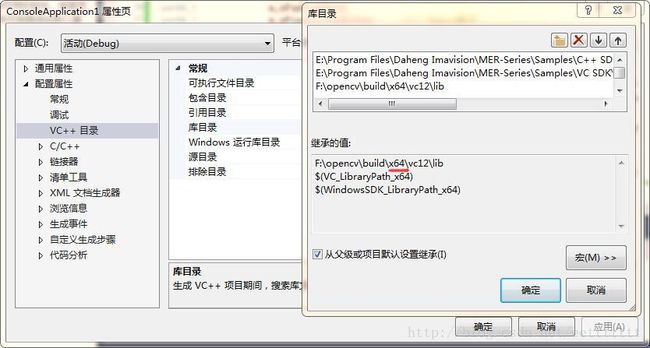
1.3 MER-1070-14UR3的SDK包,大恒图像官网有下载安装,在安装目录下有:

上图中1有inc目录,2中也有inc和lib目录。
2、摄像头SDK在VS中的安装
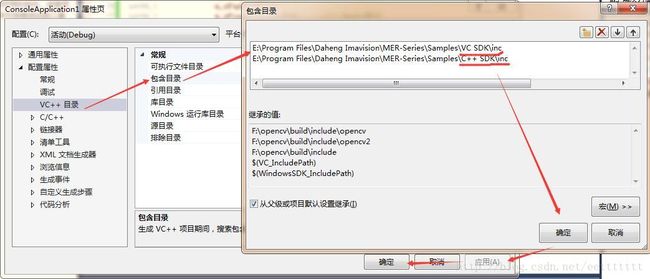
2.1在包含目录添加1.3图中1和2的inc(也就是说VC SDK和C++ SDK的inc都添加了),然后点确定-应用-确定
2.2 摄像头lib目录配置,在库目录添加1.3图中1和2的lib\x??(也就是说VC SDK和C++ SDK的lib都添加了),然后点确定-应用-确定

2.3 链接库的配置

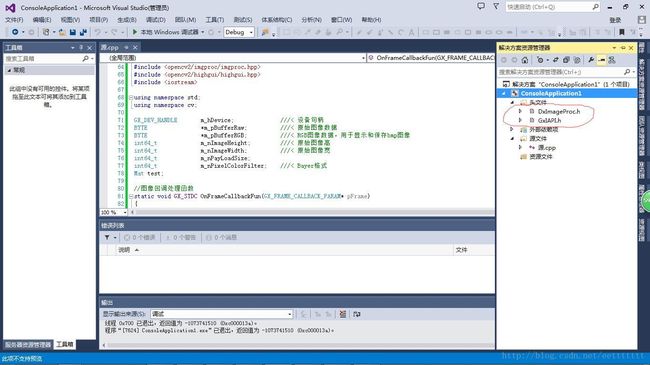
3 建立C++工程
3.1加入头文件(这个头文件在VC SDK的inc中)
3.2 加入源.cpp代码

代码转载来源:点击打开链接
#include "GxIAPI.h"
#include "DxImageProc.h"
#include
#include
#include
#include
using namespace std;
using namespace cv;
GX_DEV_HANDLE m_hDevice; ///< 设备句柄
BYTE *m_pBufferRaw; ///< 原始图像数据
BYTE *m_pBufferRGB; ///< RGB图像数据,用于显示和保存bmp图像
int64_t m_nImageHeight; ///< 原始图像高
int64_t m_nImageWidth; ///< 原始图像宽
int64_t m_nPayLoadSize;
int64_t m_nPixelColorFilter; ///< Bayer格式
Mat test;
//图像回调处理函数
static void GX_STDC OnFrameCallbackFun(GX_FRAME_CALLBACK_PARAM* pFrame)
{
//PrepareForShowImg();
if (pFrame->status == 0)
{
//对图像进行某些操作
/*memcpy(m_pBufferRaw, pFrame->pImgBuf, pFrame->nImgSize);
// 黑白相机需要翻转数据后显示
for (int i = 0; i imageData = (char*)m_pImageBuffer;
cvSaveImage("src.jpg", src);*/
memcpy(m_pBufferRaw, pFrame->pImgBuf, pFrame->nImgSize);
// RGB转换
DxRaw8toRGB24(m_pBufferRaw
, m_pBufferRGB
, (VxUint32)(m_nImageWidth)
, (VxUint32)(m_nImageHeight)
, RAW2RGB_NEIGHBOUR
, DX_PIXEL_COLOR_FILTER(m_nPixelColorFilter)
, false);
// cv_Image->imageData = (char*)m_pBufferRGB;
// cvSaveImage("./test.bmp", cv_Image);
//test.data = m_pBufferRaw;
memcpy(test.data, m_pBufferRGB, m_nImageWidth*m_nImageHeight * 3);
imwrite("./test1.bmp", test);
namedWindow("test");
imshow("test", test);
waitKey(15);
}
return;
}
int main(int argc, char* argv[])
{
GX_STATUS emStatus = GX_STATUS_SUCCESS;
GX_OPEN_PARAM openParam;
uint32_t nDeviceNum = 0;
openParam.accessMode = GX_ACCESS_EXCLUSIVE;
openParam.openMode = GX_OPEN_INDEX;
openParam.pszContent = "1";
// 初始化库
emStatus = GXInitLib();
if (emStatus != GX_STATUS_SUCCESS)
{
return 0;
}
// 枚举设备列表
emStatus = GXUpdateDeviceList(&nDeviceNum, 1000);
if ((emStatus != GX_STATUS_SUCCESS) || (nDeviceNum <= 0))
{
return 0;
}
//打开设备
emStatus = GXOpenDevice(&openParam, &m_hDevice);
//设置采集模式连续采集
emStatus = GXSetEnum(m_hDevice, GX_ENUM_ACQUISITION_MODE, GX_ACQ_MODE_CONTINUOUS);
emStatus = GXSetInt(m_hDevice, GX_INT_ACQUISITION_SPEED_LEVEL, 1);
emStatus = GXSetEnum(m_hDevice, GX_ENUM_BALANCE_WHITE_AUTO, GX_BALANCE_WHITE_AUTO_CONTINUOUS);
bool bColorFliter = false;
// 获取图像大小
emStatus = GXGetInt(m_hDevice, GX_INT_PAYLOAD_SIZE, &m_nPayLoadSize);
// 获取宽度
emStatus = GXGetInt(m_hDevice, GX_INT_WIDTH, &m_nImageWidth);
// 获取高度
emStatus = GXGetInt(m_hDevice, GX_INT_HEIGHT, &m_nImageHeight);
test.create(m_nImageHeight, m_nImageWidth, CV_8UC3);
//判断相机是否支持bayer格式
bool m_bColorFilter;
emStatus = GXIsImplemented(m_hDevice, GX_ENUM_PIXEL_COLOR_FILTER, &m_bColorFilter);
if (m_bColorFilter)
{
emStatus = GXGetEnum(m_hDevice, GX_ENUM_PIXEL_COLOR_FILTER, &m_nPixelColorFilter);
}
m_pBufferRGB = new BYTE[(size_t)(m_nImageWidth * m_nImageHeight * 3)];
if (m_pBufferRGB == NULL)
{
return false;
}
//为存储原始图像数据申请空间
m_pBufferRaw = new BYTE[(size_t)m_nPayLoadSize];
if (m_pBufferRaw == NULL)
{
delete[]m_pBufferRGB;
m_pBufferRGB = NULL;
return false;
}
//注册图像处理回调函数
emStatus = GXRegisterCaptureCallback(m_hDevice, NULL, OnFrameCallbackFun);
//发送开采命令
emStatus = GXSendCommand(m_hDevice, GX_COMMAND_ACQUISITION_START);
//---------------------
//
//在这个区间图像会通过OnFrameCallbackFun接口返给用户
Sleep(100000);
//
//---------------------
//发送停采命令
emStatus = GXSendCommand(m_hDevice, GX_COMMAND_ACQUISITION_STOP);
//注销采集回调
emStatus = GXUnregisterCaptureCallback(m_hDevice);
if (m_pBufferRGB != NULL)
{
delete[]m_pBufferRGB;
m_pBufferRGB = NULL;
}
if (m_pBufferRaw != NULL)
{
delete[]m_pBufferRaw;
m_pBufferRaw = NULL;
}
emStatus = GXCloseDevice(m_hDevice);
emStatus = GXCloseLib();
return 0;
} 