离开工控行业已经有一段时间了,最近回忆起以前的工作,又对 PID 算法有了兴趣。所以写了一个小项目,希望可以帮到需要的人,也算是对那段工作经历的一个总结。
这是一个 winform 的项目。负载是一个水箱,有一个进水口,一个出水口。设定值为液位,通过控制进水口的阀门开度使液位达到设定值,传感器的滞后时间为10秒。每秒执行一次 PID 算法(对于运动控制的项目需要将采样时间调低)。
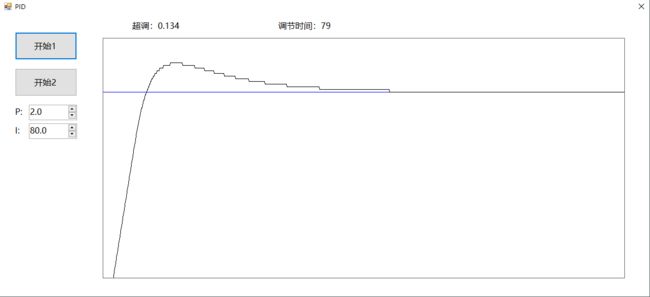
结果:
左图采用原生 PID 调节,右图采用积分分离后的 PID 调节(在误差小于一定值的情况下积分才开始累积)。可以看出积分分离可以有效的抑制超调量,但是会增加调节时间。
由于微分调节对系统稳定性影响较大,不建议初学者使用。
在分配 PID 的各项参数时,除了使用 “自动控制理论” 中计算传递函数,还可以通过试凑的方法。先确定比例的大致范围,再加入积分。加入积分时,需要先将积分值调到很大(积分值大表示效果较弱),再慢慢降低。

窗口中的控件:
label : lblInfo1(用于显示超调)lblInfo2(用于显示调节时间)
button:btnStart(开始普通 PID 算法)btnStart2(开始改进型 PID 算法)(主要采用积分分离算法)
numericupdown:numP(比例值)numI(积分值)
panel:panel2(用于绘图显示 PID 调节过程)
代码:
using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; namespace PID { public partial class Form1 : Form { PID frmPid; Box frmBox; const int yBase = 500; const int yMul = 5; const int xMul = 1; int time = 0;//上次采样时间 时间为秒 Point lastPoint; decimal maxLevel = 0;//最大值用于求超调 public Form1() { InitializeComponent(); frmPid = new PID(); frmBox = new Box(20, 0.3m, 0.1m, 0m, 0.5m); Init(); } //初始化 private void Init() { using (Graphics g = panel2.CreateGraphics()) { Pen whitePen = new Pen(Brushes.White, 2000); Point point1 = new Point(0, 0); Point point2 = new Point(0, 2000); g.DrawLine(whitePen, point1, point2); } maxLevel = 0; time = 0; lastPoint = new Point(0, yBase); } private void btnStart_Click(object sender, EventArgs e) { Start(0); } private void btnStart2_Click(object sender, EventArgs e) { Start(1); } ////// 开始 /// /// 0使用普通pi调节,1使用改进pi调节 private void Start(int number) { Init(); frmPid.Init(0.8m, numP.Value, numI.Value, 0, 1); frmBox.Init(); Pen bluePen = new Pen(Brushes.Blue, 1); using (Graphics g = panel2.CreateGraphics()) { Point point1 = new Point(0, yBase - Convert.ToInt32(frmPid.Target * 100) * yMul); Point point2 = new Point(1000, yBase - Convert.ToInt32(frmPid.Target * 100) * yMul); g.DrawLine(bluePen, point1, point2); } bool complete = false; for (int i = 0; i < 1000; i++) { { time++; frmBox.ChangeLevel(); Pen blackPen = new Pen(Brushes.Black, 1); using (Graphics g = panel2.CreateGraphics()) { Point point = new Point(time * xMul, yBase - Convert.ToInt32(frmBox.GetLevel() * 100) * yMul); g.DrawLine(blackPen, point, lastPoint); lastPoint = point; } decimal degreeIn = frmPid.GetOutPutValue(frmBox.GetLevel(), number); frmBox.ChangeDegreeIn(degreeIn); } if (frmBox.GetLevel() > maxLevel) { maxLevel = frmBox.GetLevel(); } if ((Math.Abs(frmBox.GetLevel() - frmPid.Target) / frmPid.Target < 0.01m) && (!complete)) { complete = true; lblInfo2.Text = "调节时间:" + time; } } decimal up = 0; if (maxLevel > frmPid.Target) { up = (maxLevel - frmPid.Target) / frmPid.Target; } lblInfo1.Text = "超调:" + up.ToString("0.000"); } } public class Box { private List<decimal> levelList; private decimal area; //底面积 平方米 private decimal maxFlowOut = 0.05m; //出水阀最大流量立方每秒 private decimal maxFlowIn = 0.1m; //进水阀最大流量 立方每秒 private decimal degreeIn; //进水阀开度 private decimal degreeOut; //出水阀开度 /// /// 构造函数 /// /// 底面积 /// 进水阀最大流量 立方每秒 /// 出水阀最大流量立方每秒 /// 进水阀开度 /// 出水阀开度 public Box(decimal area, decimal maxFlowIn, decimal maxFlowOut, decimal degreeIn, decimal degreeOut) { this.area = area; this.maxFlowOut = maxFlowOut; this.maxFlowIn = maxFlowIn; this.degreeIn = degreeIn; this.degreeOut = degreeOut; this.levelList = new List<decimal>(); this.levelList.Add(0); } public void Init() { this.levelList = new List<decimal>(); this.levelList.Add(0); } private decimal GetActualLevel() { return this.levelList[this.levelList.Count - 1]; } /// ///每调用一次表示经过了一秒 /// public void ChangeLevel() { decimal myflow = this.degreeIn * this.maxFlowIn - this.degreeOut * this.maxFlowOut;//增加的流量 decimal level = this.GetActualLevel() + myflow / this.area;//新的液位 if (level < 0) { level = 0; } if (level > 1) { level = 1; } this.levelList.Add(level); while (this.levelList.Count > 10) { this.levelList.RemoveAt(0); } } public decimal GetLevel() { return this.levelList[0]; } /// /// 改变进水阀开度 /// public void ChangeDegreeIn(decimal degreeIn) { this.degreeIn = degreeIn; } } /// /// PID控制类 /// public class PID { /// /// 积分累计值 /// public decimal IntegralValue { get; set; } /// /// 设定值 /// public decimal Target { get; set; } /// /// 比例 /// public decimal P { get; set; } /// /// 积分 /// public decimal I { get; set; } /// /// 输出限幅 /// private decimal MinOutPut { get; set; } /// /// 输出限幅 /// private decimal MaxOutPut { get; set; } public void Init(decimal target, decimal p, decimal i, decimal minOutput, decimal maxOutput) { this.Target = target; this.P = p; this.I = i; IntegralValue = 0; if (minOutput > maxOutput) { throw new Exception("下限幅不能大于上限幅"); } this.MinOutPut = minOutput; this.MaxOutPut = maxOutput; } /// /// 获得输出值 /// /// 反馈值 /// 0普通算法,1改进后的算法 /// public decimal GetOutPutValue(decimal feedBack, int number) { decimal error = this.Target - feedBack; if (this.I > 0) { if (number == 0) { this.IntegralValue += error / this.I; } else { if ((Math.Abs(error) < 0.5m)) { this.IntegralValue += error / this.I; } } } decimal output = error * this.P + this.IntegralValue; if (output < this.MinOutPut) { return this.MinOutPut; } if (output > this.MaxOutPut) { return this.MaxOutPut; } return output; } } }