文章转载自多个博主,再次表示感谢,学习用途,侵删
论文:Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift
normalization
1.数值问题。
输入变量的数量级不一致可能会引起数值问题。因为tansig的非线性区间大约在[-1.7,1.7]。意味着要使神经元有效,tansig( w1*x1 + w2*x2 +b) 里的 w1*x1 +w2*x2 +b 数量级应该在 1 (1.7所在的数量级)左右。这时输入较大,就意味着权值必须较小,一个较大,一个较小,两者相乘,就引起数值问题了。
2.求解需要
在训练前我们将数据归一化是为了更方便的求解。
那么,究竟给求解带来了什么方便呢?
这个问题不能一概而论,不同的算法,在归一化中得到的好处各不相同。目前大部算法,都比较需要归一化,特别是常用的梯度下降法(或梯度下降的衍生方法),归一化和不归一化,对梯度下降法的影响非常大。不同的算法,对归一化的依赖程序不同。
以梯度下降法举例。梯度法一般初始化一个初始解,然后求梯度,再用新解=旧解-梯度*学习率 的方式来迭代更新解。直到满足终止迭代条件,退出循环。
(1)初始化
过初始化的同学会发现,输入数据的范围会影响我们初始化的效果。例如,某个神经元的值为tansig(w1*x1+w2*x2+b),由于tansig函数只有在[-1.7,1.7]的范围才有较好的非线性,所以w1*x1+w2*x2+b的取值范围就要与 [-1.7,1.7]有交集(实际上需要更细腻的条件),这个神经元才能利用到非线性部分。我们希望初始化的时候,就把每个神经元初始化成有效的状态,所以,需要知道w1*x1+w2*x2+b的取值范围,也就需要知道输入输出数据的范围。输入数据的范围对初始化的影响是无法避免的,一般讨论初始化方法时,我们都假设它的范围就是[0,1]或者[-1,1],这样讨论起来会方便很多。就这样,若果数据已经归一化的话,能给初始化模块带来更简便,清晰的处理思路。(2)梯度
以输入-隐层-输出这样的三层BP为例,我们知道对于输入-隐层权值的梯度有2e*w*(1-a^2)*x的形式(e是誤差,w是隐层到输出层的权重,a是隐层神经元的值,x是输入),若果输出层的数量级很大,会引起e的数量级很大,同理,w为了将隐层(数量级为1)映身到输出层,w也会很大,再加上x也很大的话,从梯度公式可以看出,三者相乘,梯度就非常大了。这时会给梯度的更新带来数值问题。(3)学习率
由(2)中,知道梯度非常大,学习率就必须非常小,因此,学习率(学习率初始值)的选择需要参考输入的范围,不如直接将数据归一化,这样学习率就不必再根据数据范围作调整。
隐层到输出层的权值梯度可以写成 2e*a,而输入层到隐层的权值梯度为 2e *w*(1-a^2)*x ,受 x 和 w 的影响,各个梯度的数量级不相同,因此,它们需要的学习率数量级也就不相同。对w1适合的学习率,可能相对于w2来说会太小,若果使用适合w1的学习率,会导致在w2方向上步进非常慢,会消耗非常多的时间,而使用适合w2的学习率,对w1来说又太大,搜索不到适合w1的解。(4)搜索轨迹
前面已说过,输入范围不同,对应的 w 的有效范围就不同。假设 w1 的范围在 [-10,10],而w2的范围在[-100,100],梯度每次都前进1单位,那么在w1方向上每次相当于前进了 1/20,而在w2上只相当于 1/200!某种意义上来说,在w2上前进的步长更小一些,而w1在搜索过程中会比w2“走”得更快。这样会导致,在搜索过程中更偏向于w1的方向。
抛开哪种路线更有效于找到最佳解的问题不谈,两点之间直线距离最短,这种直角路线明显会更耗时间,所以不归一化,时间会明显增加。
batch normalization(BN)
启发来源的:之前的研究表明如果在图像处理中对输入图像进行白化(Whiten)操作的话——所谓白化,就是对输入数据分布变换到0均值,单位方差的正态分布——那么神经网络会较快收敛,那么BN作者就开始推论了:图像是深度神经网络的输入层,做白化能加快收敛,那么其实对于深度网络来说,其中某个隐层的神经元是下一层的输入,意思是其实深度神经网络的每一个隐层都是输入层,不过是相对下一层来说而已,那么能不能对每个隐层都做白化呢?这就是启发BN产生的原初想法,而BN也确实就是这么做的,可以理解为对深层神经网络每个隐层神经元的激活值做简化版本的白化操作。
Batch Normalization(简称BN)就是对每一批数据进行归一化,确实如此,对于训练中某一个batch的数据{x1,x2,...,xn},注意这个数据是可以输入也可以是网络中间的某一层输出。在BN出现之前,我们的归一化操作一般都在数据输入层,对输入的数据进行求均值以及求方差做归一化,但是BN的出现打破了这一个规定,我们可以在网络中任意一层进行归一化处理,因为我们现在所用的优化方法大多都是min-batch SGD,所以我们的归一化操作就成为Batch Normalization。
因为深层神经网络在做非线性变换前的激活输入值(就是那个x=WU+B,U是输入)随着网络深度加深或者在训练过程中,其分布逐渐发生偏移或者变动,之所以训练收敛慢,一般是整体分布逐渐往非线性函数的取值区间的上下限两端靠近(对于Sigmoid函数来说,意味着激活输入值WU+B是大的负值或正值),所以这导致反向传播时低层神经网络的梯度消失,这是训练深层神经网络收敛越来越慢的本质原因,而BN就是通过一定的规范化手段,把每层神经网络任意神经元这个输入值的分布强行拉回到均值为0方差为1的标准正态分布,其实就是把越来越偏的分布强制拉回比较标准的分布,这样使得激活输入值落在非线性函数对输入比较敏感的区域,这样输入的小变化就会导致损失函数较大的变化,意思是这样让梯度变大,避免梯度消失问题产生,而且梯度变大意味着学习收敛速度快,能大大加快训练速度。
对于每个隐层神经元,把逐渐向非线性函数映射后向取值区间极限饱和区靠拢的输入分布强制拉回到均值为0方差为1的比较标准的正态分布,使得非线性变换函数的输入值落入对输入比较敏感的区域,以此避免梯度消失问题。
我们把网络中间层在训练过程中,数据分布的改变称之为:“Internal Covariate Shift”。BN的提出,就是要解决在训练过程中,中间层数据分布发生改变的情况。BatchNorm就是在深度神经网络训练过程中使得每一层神经网络的输入保持相同分布的。
机器学习领域有个很重要的假设:IID独立同分布假设,就是假设训练数据和测试数据是满足相同分布的,这是通过训练数据获得的模型能够在测试集获得好的效果的一个基本保障。
怎么做?
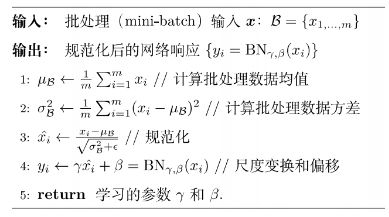
1、求每一个训练批次数据的均值和方差
2、使用求得的均值和方差对该批次的训练数据做归一化,获得0-1分布。其中ε是为了避免除数为0时所使用的微小正数。
3、尺度变换和偏移:将xi乘以γ调整数值大小,再加上β增加偏移后得到yi,这里的γ是尺度因子,β是平移因子。这一步是BN的精髓,由于归一化后的xi基本会被限制在正态分布下,使得网络的表达能力下降。为解决该问题,我们引入两个新的参数:γ,β。γ和β是在训练时网络自己学习得到的。
如果都通过BN,那么不就跟把非线性函数替换成线性函数效果相同了?这意味着什么?我们知道,如果是多层的线性函数变换其实这个深层是没有意义的,因为多层线性网络跟一层线性网络是等价的。这意味着网络的表达能力下降了,这也意味着深度的意义就没有了。所以BN为了保证非线性的获得,对变换后的满足均值为0方差为1的x又进行了scale加上shift操作(y=scale*x+shift),每个神经元增加了两个参数scale和shift参数,这两个参数是通过训练学习到的,意思是通过scale和shift把这个值从标准正态分布左移或者右移一点并长胖一点或者变瘦一点,每个实例挪动的程度不一样,这样等价于非线性函数的值从正中心周围的线性区往非线性区动了动。核心思想应该是想找到一个线性和非线性的较好平衡点,既能享受非线性的较强表达能力的好处,又避免太靠非线性区两头使得网络收敛速度太慢。
解决了什么?
一个标准的归一化步骤就是减均值除方差,在这种归一化中引入了两个需要学习的参数。
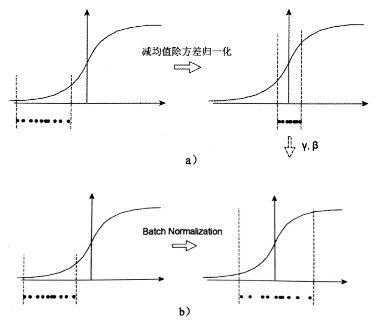
a中左图是没有经过任何处理的输入数据,曲线是sigmoid函数,如果数据在梯度很小的区域,那么学习率就会很慢甚至陷入长时间的停滞。减均值除方差后,数据就被移到中心区域如右图所示,对于大多数激活函数而言,这个区域的梯度都是最大的或者是有梯度的(比如ReLU),这可以看做是一种对抗梯度消失的有效手段。对于一层如此,如果对于每一层数据都那么做的话,数据的分布总是在随着变化敏感的区域,相当于不用考虑数据分布变化了,这样训练起来更有效率。
减均值除方差得到的分布是正态分布。如果数据本身就很不对称,或者激活函数未必是对方差为1的数据最好的效果,比如Sigmoid激活函数,在-1~1之间的梯度变化不大,那么非线性变换的作用就不能很好的体现,换言之就是,减均值除方差操作后可能会削弱网络的性能。针对该情况,在前面三步之后加入第4步完成真正的batch normalization。
BN的本质就是利用优化变一下方差大小和均值位置,使得新的分布更切合数据的真实分布,保证模型的非线性表达能力。
BN的极端的情况就是这两个参数等于mini-batch的均值和方差,那么经过batch normalization之后的数据和输入完全一样,当然一般的情况是不同的。
如何在验证集中使用?
对于预测阶段时所使用的均值和方差,其实也是来源于训练集。比如我们在模型训练时我们就记录下每个batch下的均值和方差,待训练完毕后,我们求整个训练样本的均值和方差期望值,作为我们进行预测时进行BN的的均值和方差
CNN中的BN
卷积神经网络的特征是对应到一整张特征响应图上的,所以做BN时也应以响应图为单位而不是按照各个维度。比如在某一层,batch大小为m,响应图大小为w×h,则做BN的数据量为m×w×h。
BN在深层神经网络的作用非常明显:若神经网络训练时遇到收敛速度较慢,或者“梯度爆炸”等无法训练的情况发生时都可以尝试用BN来解决。同时,常规使用情况下同样可以加入BN来加速模型训练,甚至提升模型精度。
BN所产生的问题
BN对batch是independent的,过小的batch size会导致其性能下降,一般来说每GPU上batch设为32最合适。但是对于一些其他深度学习任务batch size往往只有1-2,比如目标检测,图像分割,视频分类上,输入的图像数据很大,较大的batchsize显存吃不消。
group normalization(GN)
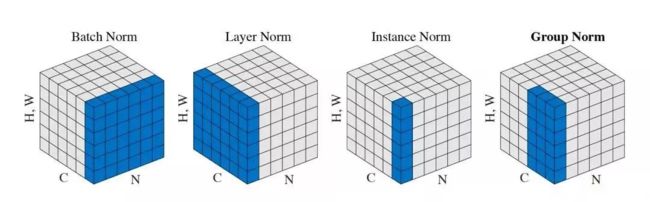
深度网络中的数据维度一般是[N, C, H, W]或者[N, H, W,C]格式,N是batch size,H/W是feature的高/宽,C是feature的channel,压缩H/W至一个维度,其三维的表示如上图,假设单个方格的长度是1,那么其表示的是[6, 6,*, * ]
BN在batch的维度上norm,归一化维度为[N,H,W],对batch中对应的channel归一化;
LN避开了batch维度,归一化的维度为[C,H,W];
IN 归一化的维度为[H,W];
而GN介于LN和IN之间,其首先将channel分为许多组(group),对每一组做归一化,及先将feature的维度由[N, C, H, W]reshape为[N, G,C//G , H, W],归一化的维度为[C//G , H, W]
为什么GN能取得较好的效果
传统角度来讲,在深度学习没有火起来之前,提取特征通常是使用SIFT,HOG和GIST特征,这些特征有一个共性,都具有按group表示的特性,每一个group由相同种类直方图的构建而成,这些特征通常是对在每个直方图(histogram)或每个方向(orientation)上进行组归一化(group-wise norm)而得到。而更高维的特征比如VLAD和Fisher Vectors(FV)也可以看作是group-wise feature,此处的group可以被认为是每个聚类(cluster)下的子向量sub-vector。
从深度学习上来讲,完全可以认为卷积提取的特征是一种非结构化的特征或者向量,拿网络的第一层卷积为例,卷积层中的的卷积核filter1和此卷积核的其他经过transform过的版本filter2(transform可以是horizontal flipping等),在同一张图像上学习到的特征应该是具有相同的分布,那么,具有相同的特征可以被分到同一个group中,按照个人理解,每一层有很多的卷积核,这些核学习到的特征并不完全是独立的,某些特征具有相同的分布,因此可以被group。
导致分组(group)的因素有很多,比如频率、形状、亮度和纹理等,HOG特征根据orientation分组,而对神经网络来讲,其提取特征的机制更加复杂,也更加难以描述,变得不那么直观。
另在神经科学领域,一种被广泛接受的计算模型是对cell的响应做归一化,此现象存在于浅层视觉皮层和整个视觉系统。
作者基于此,提出了组归一化(Group Normalization)的方式,且效果表明,显著优于BN、LN、IN等。GN的归一化方式避开了batch size对模型的影响,特征的group归一化同样可以解决$Internal$ $Covariate$ $Shift$的问题,并取得较好的效果。