CNN中卷积完后有个步骤叫pooling, 在ICLR2013上,作者Zeiler提出了另一种pooling手段(最常见的就是mean-pooling和max-pooling),叫stochastic pooling,在他的文章还给出了效果稍差点的probability weighted pooling方法。
stochastic pooling方法非常简单,只需对feature map中的元素按照其概率值大小随机选择,即元素值大的被选中的概率也大。而不像max-pooling那样,永远只取那个最大值元素。
假设feature map中的pooling区域元素值如下:
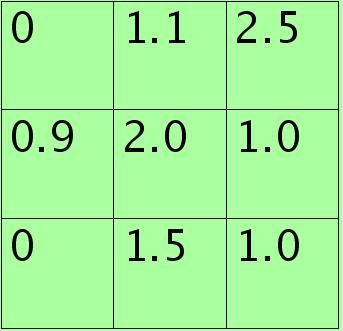
3*3大小的,元素值和sum=0+1.1+2.5+0.9+2.0+1.0+0+1.5+1.0=10
方格中的元素同时除以sum后得到的矩阵元素为:
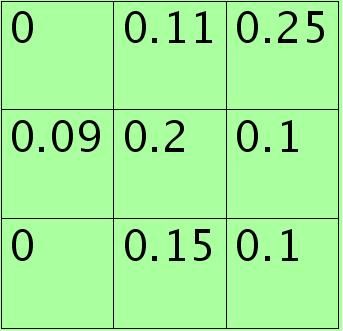
每个元素值表示对应位置处值的概率,现在只需要按照该概率来随机选一个,方法是:将其看作是9个变量的多项式分布,然后对该多项式分布采样即可,theano中有直接的multinomial()来函数完成。当然也可以自己用01均匀分布来采样,将单位长度1按照那9个概率值分成9个区间(概率越大,覆盖的区域越长,每个区间对应一个位置),然随机生成一个数后看它落在哪个区间。
比如如果随机采样后的矩阵为:
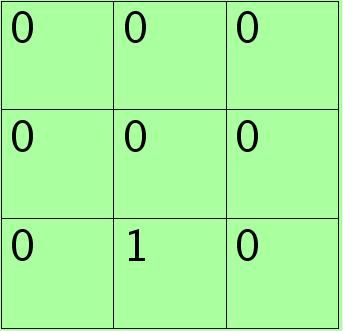
则这时候的poolng值为1.5
使用stochastic pooling时(即test过程),其推理过程也很简单,对矩阵区域求加权平均即可。比如对上面的例子求值过程为为:
0*0+1.1*0.11+2.5*0.25+0.9*0.09+2.0*0.2+1.0*0.1+0*0+1.5*0.15+1.0*0.1=1.625 说明此时对小矩形pooling后的结果为1.625.
在反向传播求导时,只需保留前向传播已经记录被选中节点的位置的值,其它值都为0,这和max-pooling的反向传播非常类似。
Stochastic pooling优点:
方法简单;
泛化能力更强;
可用于卷积层(文章中是与Dropout和DropConnect对比的,说是Dropout和DropConnect不太适合于卷积层. 不过个人感觉这没什么可比性,因为它们在网络中所处理的结构不同);
至于为什么stochastic pooling效果好,作者说该方法也是模型平均的一种,没怎么看懂。
关于Stochastic Pooling的前向传播过程和推理过程的代码可参考(没包括bp过程,所以代码中pooling选择的位置没有保存下来)
源码:pylearn2/stochastic_pool.py
""" An implementation of stochastic max-pooling, based on Stochastic Pooling for Regularization of Deep Convolutional Neural Networks Matthew D. Zeiler, Rob Fergus, ICLR 2013 """ __authors__ = "Mehdi Mirza" __copyright__ = "Copyright 2010-2012, Universite de Montreal" __credits__ = ["Mehdi Mirza", "Ian Goodfellow"] __license__ = "3-clause BSD" __maintainer__ = "Mehdi Mirza" __email__ = "mirzamom@iro" import numpy import theano from theano import tensor from theano.sandbox.rng_mrg import MRG_RandomStreams as RandomStreams from theano.gof.op import get_debug_values def stochastic_max_pool_bc01(bc01, pool_shape, pool_stride, image_shape, rng = None): """ Stochastic max pooling for training as defined in: Stochastic Pooling for Regularization of Deep Convolutional Neural Networks Matthew D. Zeiler, Rob Fergus bc01: minibatch in format (batch size, channels, rows, cols), IMPORTANT: All values should be poitivie pool_shape: shape of the pool region (rows, cols) pool_stride: strides between pooling regions (row stride, col stride) image_shape: avoid doing some of the arithmetic in theano rng: theano random stream """ r, c = image_shape pr, pc = pool_shape rs, cs = pool_stride batch = bc01.shape[0] #总共batch的个数 channel = bc01.shape[1] #通道个数 if rng is None: rng = RandomStreams(2022) # Compute index in pooled space of last needed pool # (needed = each input pixel must appear in at least one pool) def last_pool(im_shp, p_shp, p_strd): rval = int(numpy.ceil(float(im_shp - p_shp) / p_strd)) assert p_strd * rval + p_shp >= im_shp assert p_strd * (rval - 1) + p_shp < im_shp return rval #表示pool过程中需要移动的次数 return T.dot(x, self._W) # Compute starting row of the last pool last_pool_r = last_pool(image_shape[0] ,pool_shape[0], pool_stride[0]) * pool_stride[0] #最后一个pool的起始位置 # Compute number of rows needed in image for all indexes to work out required_r = last_pool_r + pr #满足上面pool条件时所需要image的高度 last_pool_c = last_pool(image_shape[1] ,pool_shape[1], pool_stride[1]) * pool_stride[1] required_c = last_pool_c + pc # final result shape res_r = int(numpy.floor(last_pool_r/rs)) + 1 #最后pool完成时图片的shape res_c = int(numpy.floor(last_pool_c/cs)) + 1 for bc01v in get_debug_values(bc01): assert not numpy.any(numpy.isinf(bc01v)) assert bc01v.shape[2] == image_shape[0] assert bc01v.shape[3] == image_shape[1] # padding,如果不能整除移动,需要对原始图片进行扩充 padded = tensor.alloc(0.0, batch, channel, required_r, required_c) name = bc01.name if name is None: name = 'anon_bc01' bc01 = tensor.set_subtensor(padded[:,:, 0:r, 0:c], bc01) bc01.name = 'zero_padded_' + name # unraveling window = tensor.alloc(0.0, batch, channel, res_r, res_c, pr, pc) window.name = 'unravlled_winodows_' + name for row_within_pool in xrange(pool_shape[0]): row_stop = last_pool_r + row_within_pool + 1 for col_within_pool in xrange(pool_shape[1]): col_stop = last_pool_c + col_within_pool + 1 win_cell = bc01[:,:,row_within_pool:row_stop:rs, col_within_pool:col_stop:cs] window = tensor.set_subtensor(window[:,:,:,:, row_within_pool, col_within_pool], win_cell) #windows中装的是所有的pooling数据块 # find the norm norm = window.sum(axis = [4, 5]) #求和当分母用 norm = tensor.switch(tensor.eq(norm, 0.0), 1.0, norm) #如果norm为0,则将norm赋值为1 norm = window / norm.dimshuffle(0, 1, 2, 3, 'x', 'x') #除以norm得到每个位置的概率 # get prob prob = rng.multinomial(pvals = norm.reshape((batch * channel * res_r * res_c, pr * pc)), dtype='float32') #multinomial()函数能够按照pvals产生多个多项式分布,元素值为0或1 # select res = (window * prob.reshape((batch, channel, res_r, res_c, pr, pc))).max(axis=5).max(axis=4) #window和后面的矩阵相乘是点乘,即对应元素相乘,numpy矩阵符号 res.name = 'pooled_' + name return tensor.cast(res, theano.config.floatX) def weighted_max_pool_bc01(bc01, pool_shape, pool_stride, image_shape, rng = None): """ This implements test time probability weighted pooling defined in: Stochastic Pooling for Regularization of Deep Convolutional Neural Networks Matthew D. Zeiler, Rob Fergus bc01: minibatch in format (batch size, channels, rows, cols), IMPORTANT: All values should be poitivie pool_shape: shape of the pool region (rows, cols) pool_stride: strides between pooling regions (row stride, col stride) image_shape: avoid doing some of the arithmetic in theano """ r, c = image_shape pr, pc = pool_shape rs, cs = pool_stride batch = bc01.shape[0] channel = bc01.shape[1] if rng is None: rng = RandomStreams(2022) # Compute index in pooled space of last needed pool # (needed = each input pixel must appear in at least one pool) def last_pool(im_shp, p_shp, p_strd): rval = int(numpy.ceil(float(im_shp - p_shp) / p_strd)) assert p_strd * rval + p_shp >= im_shp assert p_strd * (rval - 1) + p_shp < im_shp return rval # Compute starting row of the last pool last_pool_r = last_pool(image_shape[0] ,pool_shape[0], pool_stride[0]) * pool_stride[0] # Compute number of rows needed in image for all indexes to work out required_r = last_pool_r + pr last_pool_c = last_pool(image_shape[1] ,pool_shape[1], pool_stride[1]) * pool_stride[1] required_c = last_pool_c + pc # final result shape res_r = int(numpy.floor(last_pool_r/rs)) + 1 res_c = int(numpy.floor(last_pool_c/cs)) + 1 for bc01v in get_debug_values(bc01): assert not numpy.any(numpy.isinf(bc01v)) assert bc01v.shape[2] == image_shape[0] assert bc01v.shape[3] == image_shape[1] # padding padded = tensor.alloc(0.0, batch, channel, required_r, required_c) name = bc01.name if name is None: name = 'anon_bc01' bc01 = tensor.set_subtensor(padded[:,:, 0:r, 0:c], bc01) bc01.name = 'zero_padded_' + name # unraveling window = tensor.alloc(0.0, batch, channel, res_r, res_c, pr, pc) window.name = 'unravlled_winodows_' + name for row_within_pool in xrange(pool_shape[0]): row_stop = last_pool_r + row_within_pool + 1 for col_within_pool in xrange(pool_shape[1]): col_stop = last_pool_c + col_within_pool + 1 win_cell = bc01[:,:,row_within_pool:row_stop:rs, col_within_pool:col_stop:cs] window = tensor.set_subtensor(window[:,:,:,:, row_within_pool, col_within_pool], win_cell) # find the norm norm = window.sum(axis = [4, 5]) norm = tensor.switch(tensor.eq(norm, 0.0), 1.0, norm) norm = window / norm.dimshuffle(0, 1, 2, 3, 'x', 'x') # average res = (window * norm).sum(axis=[4,5]) #前面的代码几乎和前向传播代码一样,这里只需加权求和即可 res.name = 'pooled_' + name return res.reshape((batch, channel, res_r, res_c))
参考资料:
Stochastic Pooling for Regularization of Deep Convolutional Neural Networks. Matthew D. Zeiler, Rob Fergus.
pylearn2/stochastic_pool.py