姓名:陈嘉伟
学号:16140220051
装载自:http://bbs.dji.com/thread-32484-1-1.html
【嵌牛导读】无人机集合了力学,物理学,计算机学等各种知识。所以在学习和使用无人机之前,我们需要了解一些关于无人机的基础知识。本文将会以通俗易懂的语言给大家介绍一下无人机的入门知识。
【嵌牛鼻子】无人机入门知识
【牵牛提问】无人机的基础组成部分有什么?无人机飞行的基础原理是什么?
【嵌牛正文】
1.四轴飞行器的原理
首先让我们来认识四轴飞行器的工作原理
为什么四轴能飞起来?没有机翼,升降舵,方向舵,他怎么控制升降/方向?
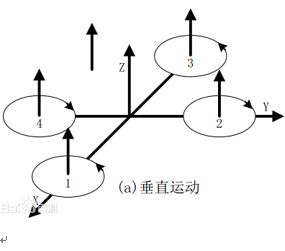
1.1垂直运动
垂直(升降)运动是最好的理解,就是油门控制,退油门上升,拉油门降低,所以升力来自旋翼。
1.2俯仰运动
图(b)中,电机1的转速上升、电机3的转速下降,电机2,电机4的转速保持不变,为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速改变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身围绕Y轴旋转(如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕Y轴向另一个方向旋转,实现飞行器的俯仰运动。

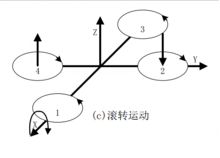
1.3滚转运动
与图(b)的原理相同,在图(C)中,改变电机2和电机4的转速,白痴电机1和电机3的转速不变,则可使机身绕X轴旋转(正向和反向),实现飞行器的滚转运动。
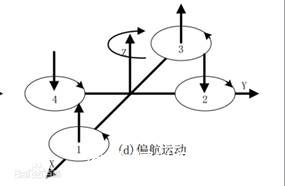
1.4偏航运动
四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力左右会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正传,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图(d)中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。因为电机的总升力不变,飞机不会发会垂直运动
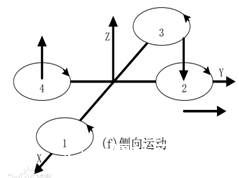
1.5前后运动
要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图(e)中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图(b)的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。当然在图(b)图(c)中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。

2.关于飞控
直接将地面遥控的信号传送到飞行器。当你把操纵杆放开的时候,飞机将会按照你所指定的方向继续上一姿态的飞行。
自稳——释放操纵杆之后飞机将会停止原有的飞行模式并悬停在一个稳定的位置。
自动飞行——模型可以按照你预先设定好的路径飞行,当然,你可以手动干预飞行路线。
自动返航——飞行器可以按照预设的路线自动返航至起始飞行点并保持在预设高度悬停,这个功能需要GPS支持。
悬停——如果不给飞行器任何的控制信号,那么飞行器将会尽可能保持原有的飞行姿态并保持原有的位置不变
自动启动和着陆——或许这是避免坠机的最好方式了。。。
利用一些外部模块或者采用其他飞控都可以实现更多不同的功能,采用什么飞控和外设取决于你需要什么功能?
飞控都有什么种类有很多的飞控可以供玩家选择,而且它们的特性描述也很好。选择飞控的最好方式是直接选用那些已经编程后的商业飞控,或者列一个需求的功能清单,请有飞控编程经验的程序员来对你的飞控进行编程。
APM pix 有时间学习,调试,性价比高,飞行比较稳定。
S4V2 /(ㄒoㄒ)/~~个人不是很喜欢,电脑调参界面呆板。
Dji nazalite 简单,易上手,电脑调参方便,飞行稳定。
对于QQ KK MWC CC3D有兴趣的同学可以在网上搜一下。
3.关于机架
这个看个人喜好了,塑料,碳纤,玻纤,轻木,铝合金。机架的材料决定了强度,稳定性,续航。。。。等等因素。机架大小的选择关系到了电机和桨叶的大小范围,所以还需明白这款机架配多大电机和桨叶最合适。
4.关于电机
电机的选择决定了飞行器的安全性能,电机在空中出现故障有可能导致空中故障停机,还需明白这款电机最大支持多大范围电压。
电机有很多种不同的类型,你应该在许多中电机中选择最匹配多轴飞行器的电机。首先,这种电机应该是无刷电机,是因为有刷电机不如无刷电机效率高。另一个很重要的因素是电机的尺寸,更大的电机一般来说更重,但是多轴飞行器并不止携带一个电机。
无刷电机有两种分类:内转子电机和外转子电机。内转子电机的电机机座固定不动,转子电机的主轴转动,通常转速较高,但是转矩小;外转子电机的内部主轴固定不动,外壳转动,通常转速较低,转矩大。
4.1电机KV值:
大KV配小桨,小KV配大桨。
KV值是每1V电压下电机每分钟空转的转速,例如KV800在1V的电压下空转转速是800转每分钟。10V的电压下是8000转每分钟的空转转速。
绕线匝数多的,KV值低,最高输出电流小,但扭力大
绕线匝数少的,KV值高,最高输出电流大,但扭力小
4.2电机型号:
定子粗的,力气大
电机型号,如2312.3510,这些数字表示电机定子的直径和高度。前面两位是定子直径,后面两位是定子高度,单位是毫米。
前面两位越大,电机越肥,后两位越大,电机越高。
5.关于电调
全程电子调速器
电调接收飞控的信号来驱动电机运转,对于不同类型的电机需要采用不同的电调来搭配,配合电调的无刷电机用于驱动多轴飞行器。无刷电机工作原理相当复杂,大概过程是电调将直流电转化为三相交流电,交流电通过线圈产生磁场,吸引永磁铁转动。磁场的变化决定了电机的转速,任意更换电调出线端3根线中的两根线,可以使电机反向转动。
6.关于电池
电池的选择十分重要,电芯的数目,电流电量(mah)电容释放速率,以及如何正常对一枚电池(这里指普通电池)进行充放电。
同样的,电池的选择同样依赖于你的多轴飞行器带多少个电机,采用什么飞控等等因素,但是对于新手来说,4电芯(4S)的电池足够你的航模供能了,一般来说要求不高的话。3S的已经足够了。
白色外壳的是DJI智能电池,它具备了普通电池没有的功能。电量显示,寿命显示,电池存放自放电保护,平衡充保护,过冲保护,充电温度保护,短路保护,通讯等功能。。。
电池的选购,千万不要贪图小便宜!电池这个部件虽然对于其他部件来说不是最贵的,但是却是十分重要的,一定要反复确认电池的电量,一定要匹配整个模型其他的部分,选择C数太高的电池不仅会对你的电池寿命造成影响,而且也会损害你的电调,千万不要购买劣质的电池,否则损害电池事小,烧毁模型事大。
7.螺旋桨
首先需要说明的是,在螺旋桨工作的时候一定要与它保持距离,否则很容易受伤。
定义螺旋桨有两个十分重要的指标:直径和几何螺距,几乎所有的螺旋桨在售出的时候都会在其包装上注明例如94*50这样的字样,第一个数字94代表了它的直径,第二个数字50代表了它的几何螺距,二者单位均为英寸。
8.遥控/接收机
多轴航模属于遥控设备,所以你需要一个遥控器。它应该至少有4个通道,包括油门,横滚,俯仰,偏航,也就是油门加XYZ轴的移动。更多的通道更有利于操控,比如自稳飞行,开关LED灯,收方脚架。不同品牌不同型号的遥控决定了你能够有多少通道来操纵飞行器。