原文作者:aircraft
原文链接:https://www.cnblogs.com/DOMLX/p/11681069.html
一.初始化世界以及模型
/// 冲突配置包含内存的默认设置,冲突设置。高级用户可以创建自己的配置。 btDefaultCollisionConfiguration* collisionConfiguration = new btDefaultCollisionConfiguration(); /// 使用默认的冲突调度程序。对于并行处理,您可以使用不同的分派器(参见Extras/BulletMultiThreaded) btCollisionDispatcher* dispatcher = new btCollisionDispatcher(collisionConfiguration); /// btDbvtBroadphase是一种很好的通用的两步法碰撞检测。你也可以尝试btAxis3Sweep。 btBroadphaseInterface* overlappingPairCache = new btDbvtBroadphase(); /// 默认约束求解器。对于并行处理,您可以使用不同的解决程序(参见Extras/BulletMultiThreaded) btSequentialImpulseConstraintSolver* solver = new btSequentialImpulseConstraintSolver; btDiscreteDynamicsWorld* dynamicsWorld = new btDiscreteDynamicsWorld(dispatcher,overlappingPairCache,solver,collisionConfiguration); dynamicsWorld->setGravity(btVector3(0,-10,0));
上面看起来很多麻烦的东西,但是其实我们都不需要看,也不需要理解,拿到dynamicsWorld这个指针就行了,它用于表示刚体碰撞的世界。后面有很多设置都是关于他的,setGravity(btVector3(0,-10,0));这个就是设置一下他的重力为10N/kg.
二.导入3D模型
在导入3d模型前,我们要学会怎么去画三角网格,或者说凸壳,我在写这个导入3D模型碰撞检测的程序的时候,真的是在网上找不到什么有用的资料,头都快裂开了!!!
Bullet里面有内置很多常规的3维模型画法,比如长方体,圆,正方体之类的,并不能给我带来什么启发和用处,因为导入一个3D模型,比如OBJ文件,就是要把一个个的三角网格画出来,最后成为一个3D模型。
2.1三角片面碰撞模型
2.1对于复杂的碰撞模型,需要用三角片面来模拟。
静态碰撞模型,对于大地,房屋等物体。可以用静态的三角片面来模拟。
btBvhTriangleMeshShape 静态的三角片面模型
构建方法
btBvhTriangleMeshShape (btStridingMeshInterface *meshInterface, bool useQuantizedAabbCompression, bool buildBvh=true)
示例代码
btTriangleMesh* trimesh = new btTriangleMesh();
bool useQuantization = true;
btCollisionShape* concaveShape = new btBvhTriangleMeshShape(trimesh,useQuantization); //凹的三角片面碰撞模型
startTransform.setOrigin(convexDecompositionObjectOffset);
localCreateRigidBody(0.f,startTransform,concaveShape); //质量不能设置为非0,btBvhTriangleMeshShape似乎只能用在静态的场景中。
相关类
btTriangleMesh 一个方便的存储三角片面数据的类,接口简单
通过
void addTriangle (const btVector3 &vertex0, const btVector3 &vertex1, const btVector3 &vertex2, bool removeDuplicateVertices=false)
来为片面增加三角形,这个函数不会检查相同顶点的冗余
2.2动态的碰撞模型
btGImpactMeshShape 该类可以构建一个动态的三角片面碰撞模型
构建方法
btGImpactMeshShape (btStridingMeshInterface *meshInterface) 通过传入三角片面数据来构建
使用该类时,一是在构建该类后要调用updateBound()。二是要在dispatcher中注册该类的碰撞算法,
示例代码如下:
btGImpactMeshShape * trimesh = new btGImpactMeshShape(indexVertexArrays); //构建形状
trimesh->setLocalScaling(btVector3(4.f,4.f,4.f));
trimesh->updateBound();
m_trimeshShape = trimesh;
//register algorithm
btCollisionDispatcher * dispatcher = static_cast
btGImpactCollisionAlgorithm::registerAlgorithm(dispatcher); //注册算法,如果不注册算法的话,会出现问题,如相同的模型不能发生碰撞
相关类
btTriangleIndexVertexArray 储存三角片面数据
btTriangleIndexVertexArray (int numTriangles, int *triangleIndexBase, int triangleIndexStride, int numVertices, btScalar *vertexBase, int vertexStride)
通过制定三角形顶点数组和三角形索引数组的地址,以及每组数据大小来构建。所以类中不会实际含有片面数据。使得三角片面数据可以与渲染部分的代码共用。
// create trimesh
btTriangleIndexVertexArray* indexVertexArrays = new btTriangleIndexVertexArray(NUM_TRIANGLES, //片面数据
&gIndices[0][0],
3*sizeof(int),
NUM_VERTICES,(REAL*) &gVertices[0],sizeof(REAL)*3);
2.3其他类
btConvexHullShape 一个凸体模型的类,构建一个凸体。而构建这个凸体的方法十分简单——往这个类加顶点就可以了
btConvexHullShape (const btScalar *points=0, int numPoints=0, int stride=sizeof(btVector3))
void addPoint (const btVector3 &point)
示例
btConvexHullShape* convexShape = new btConvexHullShape(); //用桌子的点集构建了一个凸的碰撞模型,虽然桌子是凹的
for (i=0;i
{
convexShape->addPoint(hull->getVertexPointer()[i]); //这个模型只需要加如点就可以了
}
最后我也是使用了btConvexHullShape,这个类来导入3D模型。上面动态那个也可以进行碰撞检测,我也试过了。静态那个就不行了,因为不会动。
3.读取3D模型的数据
这里的话就不详细说了,可以看我前面几篇opengl导入3D模型的博客。
然后我们用btConvexHullShape类将我们读取的模型数据导入,构造出来我们的物体。
代码如下:
void InitObject() { ReadPIC();//读取3D模型内部数据存储在m_pic结构体 btTriangleMesh* tMesh = new btTriangleMesh(); int k = 0; for (int i = 0; i < m_pic.F.size(); i++) { points[k++].setValue(m_pic.V[m_pic.F[i].V[0]].X / YU, m_pic.V[m_pic.F[i].V[0]].Y / YU, m_pic.V[m_pic.F[i].V[0]].Z / YU); points[k++].setValue(m_pic.V[m_pic.F[i].V[1]].X / YU, m_pic.V[m_pic.F[i].V[1]].Y / YU, m_pic.V[m_pic.F[i].V[1]].Z / YU); points[k++].setValue(m_pic.V[m_pic.F[i].V[2]].X / YU, m_pic.V[m_pic.F[i].V[2]].Y / YU, m_pic.V[m_pic.F[i].V[2]].Z / YU); } btScalar mass(10.f); // 刚体是动态的如果且仅当质量为非零时,否则是静止的 btConvexHullShape * collisionShape = new btConvexHullShape((btScalar*)points, m_pic.F.size()*3); btDefaultMotionState* groundMotionState = new btDefaultMotionState(btTransform(btQuaternion(0, 0, 0, 1), btVector3(0, 1000, 0))); bool isDynamic = (mass != 0.f); btVector3 localInertia(0, 0, 0); if (isDynamic) collisionShape->calculateLocalInertia(mass, localInertia); btRigidBody::btRigidBodyConstructionInfo rbInfo(mass, groundMotionState, collisionShape, localInertia); body = new btRigidBody(rbInfo); //body->setCollisionFlags(body->getCollisionFlags() | btCollisionObject::CF_KINEMATIC_OBJECT); //body->setActivationState(4); mp_btDynamicsWorld->addRigidBody(body); /* //init ground btCollisionShape *groundShape = new btBoxShape(btVector3(1000, 0.5, 1000)); //half size btVector3 groundpos = btVector3(0, 0, 0); btQuaternion groundrot(0, 0, 0, 1); btDefaultMotionState* groundMotion = new btDefaultMotionState(btTransform(groundrot, groundpos)); ground = new btRigidBody(0.0, groundMotion, groundShape);//mass = 0 means it is a static object btScalar rest = btScalar(1); ground->setRestitution(rest);//设置碰撞反弹系数 默认为0 mp_btDynamicsWorld->addRigidBody(ground); */ //init ground btConvexHullShape *groundShape = new btConvexHullShape((btScalar*)points, m_pic.F.size() * 3); btVector3 groundpos = btVector3(0, 0, 0); btDefaultMotionState* groundMotion = new btDefaultMotionState(btTransform(btQuaternion(0, 0, 0, 1), btVector3(0, 0, 0))); ground = new btRigidBody(0.0, groundMotion, groundShape);//mass = 0 means it is a static object btScalar rest = btScalar(1); ground->setRestitution(rest);//设置碰撞反弹系数 默认为0 mp_btDynamicsWorld->addRigidBody(ground); }
三.进行碰撞检测
3.1碰撞反馈
既然要进行碰撞检测,那么碰撞时,程序就要告诉我们,物体进行碰撞了,然后我们要怎么去处理这个碰撞。。。
那怎么获取碰撞时的信息呢?
int numManifolds = mp_btDynamicsWorld->getDispatcher()->getNumManifolds(); for (int i = 0; i < numManifolds; i++) { btPersistentManifold * contactManifold = mp_btDynamicsWorld->getDispatcher()->getManifoldByIndexInternal(i); int numContacts = contactManifold->getNumContacts(); if (numContacts > 0) { cout << "碰撞" << endl; } }
我们可以获取两个对象的接触点,如果存在接触点,并且还大于0,那么此时肯定是碰撞了,我们就可以对这个碰撞进行处理。
这个代码可以放在update 或者render或者display绘制里都可以。
3.2碰撞检测模型绘制
这时候我们准备工作都已经做好了,就可以在自己的绘制display函数里将3D模型绘制出来。
if (motion)delete motion; //motion = new btDefaultMotionState(btTransform(btQuaternion(1, 1, 0, 1), btVector3(0, 100, 0))); //body->setMotionState(motion); btTransform trans = body->getWorldTransform(); //trans.setOrigin(btVector3(0.0f, 400, 0.0f)); //trans.setRotation(btQuaternion(1, 1, 0, 1)); //body->getMotionState()->setWorldTransform(trans); //body->getMotionState()-> btScalar m[16]; trans.getOpenGLMatrix(m); glColor3f(0, 0, 1); glPushMatrix(); glMultMatrixf((GLfloat*)m); //glTranslated(0, -400, 0); //glutSolidCube(400); for (int i = 0; i < m_pic.F.size(); i++) { glBegin(GL_TRIANGLES); // 绘制三角形 if (m_pic.VT.size() != 0)glTexCoord2f(m_pic.VT[m_pic.F[i].T[0]].TU, m_pic.VT[m_pic.F[i].T[0]].TV); //纹理 if (m_pic.VN.size() != 0)glNormal3f(m_pic.VN[m_pic.F[i].N[0]].NX, m_pic.VN[m_pic.F[i].N[0]].NY, m_pic.VN[m_pic.F[i].N[0]].NZ);//法向量 glVertex3f(m_pic.V[m_pic.F[i].V[0]].X / YU, m_pic.V[m_pic.F[i].V[0]].Y / YU, m_pic.V[m_pic.F[i].V[0]].Z / YU); // 上顶点 if (m_pic.VT.size() != 0)glTexCoord2f(m_pic.VT[m_pic.F[i].T[1]].TU, m_pic.VT[m_pic.F[i].T[1]].TV); //纹理 if (m_pic.VN.size() != 0)glNormal3f(m_pic.VN[m_pic.F[i].N[1]].NX, m_pic.VN[m_pic.F[i].N[1]].NY, m_pic.VN[m_pic.F[i].N[1]].NZ);//法向量 glVertex3f(m_pic.V[m_pic.F[i].V[1]].X / YU, m_pic.V[m_pic.F[i].V[1]].Y / YU, m_pic.V[m_pic.F[i].V[1]].Z / YU); // 左下 if (m_pic.VT.size() != 0)glTexCoord2f(m_pic.VT[m_pic.F[i].T[2]].TU, m_pic.VT[m_pic.F[i].T[2]].TV); //纹理 if (m_pic.VN.size() != 0)glNormal3f(m_pic.VN[m_pic.F[i].N[2]].NX, m_pic.VN[m_pic.F[i].N[2]].NY, m_pic.VN[m_pic.F[i].N[2]].NZ);//法向量 glVertex3f(m_pic.V[m_pic.F[i].V[2]].X / YU, m_pic.V[m_pic.F[i].V[2]].Y / YU, m_pic.V[m_pic.F[i].V[2]].Z / YU); // 右下 glEnd(); // 三角形绘制结束 } glPopMatrix(); int numManifolds = mp_btDynamicsWorld->getDispatcher()->getNumManifolds(); for (int i = 0; i < numManifolds; i++) { btPersistentManifold * contactManifold = mp_btDynamicsWorld->getDispatcher()->getManifoldByIndexInternal(i); int numContacts = contactManifold->getNumContacts(); if (numContacts > 0) { cout << "碰撞到地面" << endl; } } //ground btTransform transg = ground->getWorldTransform(); //trans.setOrigin(btVector3(0.0f, 400, 0.0f)); //trans.setRotation(btQuaternion(1, 1, 0, 1)); //body->getMotionState()->setWorldTransform(trans); //body->getMotionState()-> /* btScalar mg[16]; transg.getOpenGLMatrix(mg); glColor3f(0, 1, 0); glPushMatrix(); glMultMatrixf((GLfloat*)mg); */ glPushMatrix(); glScalef(1, 0.0005, 1); //glScalef(1, 1, 1); glutSolidCube(2000); //size glPopMatrix();
四.结果
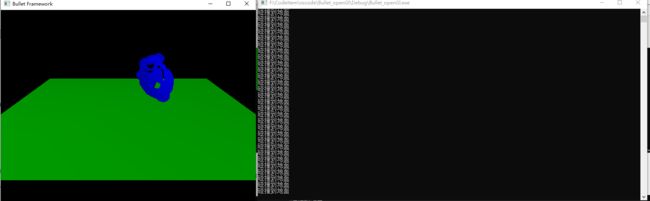
我们可以看看这个项目的运行过程和结果图:
兔子模型在进行自由落体,下面是一个地板。

地板颜色给我换了一下,兔子又下落了点距离。

当兔子接触到地面时,我们将碰撞检测的结果打印出来, 这里也就是简单的打印 碰撞到了地面。

可以看到我们的兔子模型,碰撞到地面之后,遵循现实物理规则,被反弹起来一点,然后砸歪了。

本项目源码获得可以添加后台小编微信发送:本文章标题———源码 获取:
可微信扫码关注本人公众号,里面会不定期的分享各种编程教程,和共享源码,诸如研究分享关于c/c++,python,前端,后端,opencv,halcon,opengl,机器学习深度学习之类有关于基础编程,图像处理和机器视觉开发的知识
