Ardupilot 飞控代码解锁流程分析
摘要
本文档只有记录分析ardupilot飞控代码解锁的过程,如果有分析不到的地方,欢迎批评指导,谢谢,联系方式:微信lxw15982962929
**重点标志变量:
_flags.armed=0表示没有解锁,
_flags.armed=1表示解锁
arming_counter解锁上锁计数标志位
channel_yaw->get_control_in(); //获得偏航值,传递给tmp变量,这个值通过pwm转换的角度范围是-4500到+4500
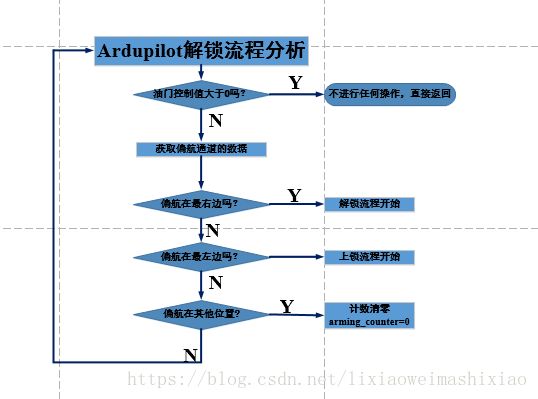
解锁上锁思路整理:首先判断油门控制量的值是否大于0,如果大于0,不进行任何计数操作,直接返回,然后进行偏航通道的判断,以美国手为例,偏航在最右边进行解锁操作,偏航在最左边进行解锁操作,偏航在中间不进行操作。细节看visio流程图。
目录
文章目录
- 摘要
- ****重点标志变量:** ***_flags.armed=0表示没有解锁,*** *****_flags.armed=1表示解锁***** ***arming_counter解锁上锁计数标志位*** ***channel_yaw->get_control_in(); //获得偏航值,传递给tmp变量,这个值通过pwm转换的角度范围是-4500到+4500*** 解锁上锁思路整理:首先判断油门控制量的值是否大于0,如果大于0,不进行任何计数操作,直接返回,然后进行偏航通道的判断,以美国手为例,偏航在最右边进行解锁操作,偏航在最左边进行解锁操作,偏航在中间不进行操作。细节看visio流程图。
- 目录
- 1.代码分析
- 3.visio流程图分析
1.代码分析
(1)首先上传需要看的代码
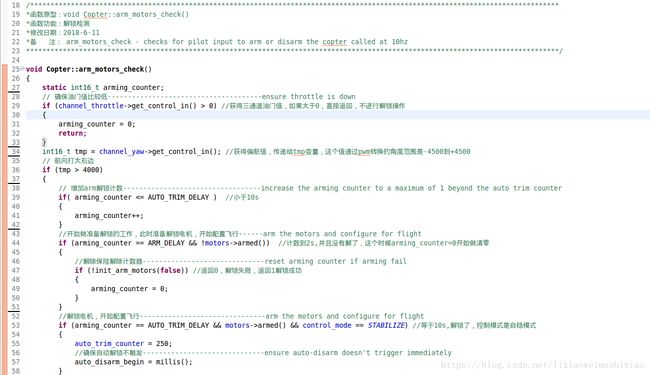
void Copter::arm_motors_check()
{
static int16_t arming_counter;
// 确保油门值比较低--------------------------------------ensure throttle is down
if (channel_throttle->get_control_in() > 0) //获得三通道油门值,如果大于0,直接返回,不进行解锁操作
{
arming_counter = 0;
return;
}
int16_t tmp = channel_yaw->get_control_in(); //获得偏航值,传递给tmp变量,这个值通过pwm转换的角度范围是-4500到+4500
// 航向打大右边
if (tmp > 4000)
{
// 增加arm解锁计数----------------------------------increase the arming counter to a maximum of 1 beyond the auto trim counter
if( arming_counter <= AUTO_TRIM_DELAY ) //小于10s
{
arming_counter++;
}
//开始做准备解锁的工作,此时准备解锁电机,开始配置飞行------arm the motors and configure for flight
if (arming_counter == ARM_DELAY && !motors->armed()) //计数到2s,并且没有解了,这个时候arming_counter=0开始做清零
{
//解除保险解除计数器------------------------------reset arming counter if arming fail
if (!init_arm_motors(false)) //返回0,解锁失败,返回1解锁成功
{
arming_counter = 0;
}
}
//解锁电机,开始配置飞行-------------------------------arm the motors and configure for flight
if (arming_counter == AUTO_TRIM_DELAY && motors->armed() && control_mode == STABILIZE) //等于10s,解锁了,控制模式是自稳模式
{
auto_trim_counter = 250;
//确保自动解锁不触发------------------------------ensure auto-disarm doesn't trigger immediately
auto_disarm_begin = millis();
}
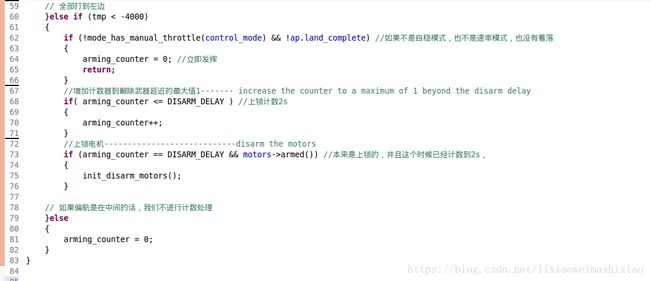
// 全部打到左边
}else if (tmp < -4000)
{
if (!mode_has_manual_throttle(control_mode) && !ap.land_complete) //如果不是自稳模式,也不是速率模式,也没有着落
{
arming_counter = 0; //立即发挥
return;
}
//增加计数器到解除武器延迟的最大值1------- increase the counter to a maximum of 1 beyond the disarm delay
if( arming_counter <= DISARM_DELAY ) //上锁计数2s
{
arming_counter++;
}
//上锁电机----------------------------disarm the motors
if (arming_counter == DISARM_DELAY && motors->armed()) //本来是上锁的,并且这个时候已经计数到2s,
{
init_disarm_motors();
}
// 如果偏航是在中间的话,我们不进行计数处理
}else
{
arming_counter = 0;
}
}
#2.代码截图
3.visio流程图分析