Zynq-7000系列之linux开发学习笔记:PS和PL端的GPIO使用(三)
开发板:Zynq7030数据采集板
PC平台:Ubuntu-18.04 + MobaXterm
开发环境:Xilinx Vivado + SDK -18.3
学习目标:PS通过 EMIO、AXI_GPIO 口来控制PL端LED
一、MIO、EMIO、AXI_GPIO
GPIO是最常见的一种IO外设。在Zynq7000平台下,Xilinx为我们提供了 MIO、EMIO、AXI_GPIO ,三种类型的GPIO口。
MIO是属于PS端的固定IO口,使用时不需要消耗PL端的资源;EMIO是通过PL进行扩展的IO口,使用时需要分配PL端的引脚,消耗PL端资源;AXI_GPIO是Xilinx封装好的IP核,是PS端通过AXI GP总线控制PL端的IO口技术,使用时需要消耗PL端资源。
- MIO、EMIO
Zynq7000系列芯片提供54个MIO引脚,被分配在GPIO的Bank0和Bank1中,与PS端直接相连。这些GPIO引脚连接着PS端的许多外设和存储设备接口,如下图中所示。

同时还提供64个EMIO引脚,这些引脚被分配在Bank2和Bank3中。当PS端的MIO不够用时,可以配置来控制PL端的引脚。MIO、EMIO的框架如下图中所示:
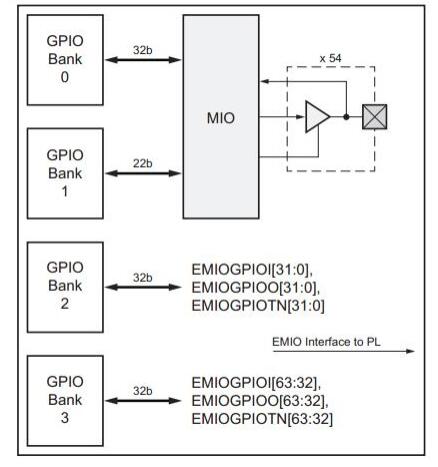

其在Bank中的分布如下:
| MIO-EMIO | Bank |
|---|---|
| MIO 0 - 31 | Bank 0 |
| MIO 32 - 53 | Bank 1 |
| EMIO 54 - 85 | Bank 2 |
| EMIO 86 - 117 | Bank 3 |
- AXI_GPIO
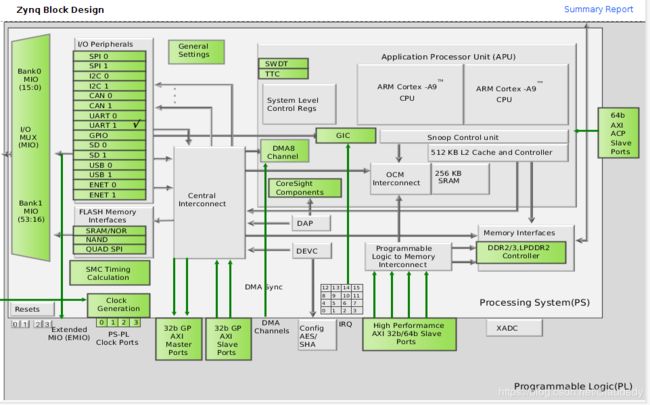
AXI_GPIO实际是PL端的IO管脚挂载在AXI GP总线上,通过PS端来控制的接口。这种接口是PS-PL互联技术中的一种,详细的AXI内容可以去查看相应的官方文档。该接口可以在Zynq的框架中看见,如下图中左下角的绿框中所示。
二、Vivado工程创建
由于设计的Zynq7030数据采集板的PS端MIO没有专门引出IO口接LED灯,所以本次实验就只做EMIO、AXI_GPIO两种方式控制PL端的LED。
- EMIO控制LED
首先打开Vivado创建工程,命名为emio_gpio。然后按照上一篇文章Zynq-7000系列之linux开发学习笔记:HelloWorld(二)的介绍完成工程创建。

进入到Vivado界面后,点击 Create Block Design 按钮,设计命名为emio_gpio。

Zynq PS的IP配置在上篇文章的基础上,在 Peripheral I/O Pins 中添加GPIO EMIO配置。并在 MIO Configuration 中将 EMIO GPIO (Width) 设置为1即可。

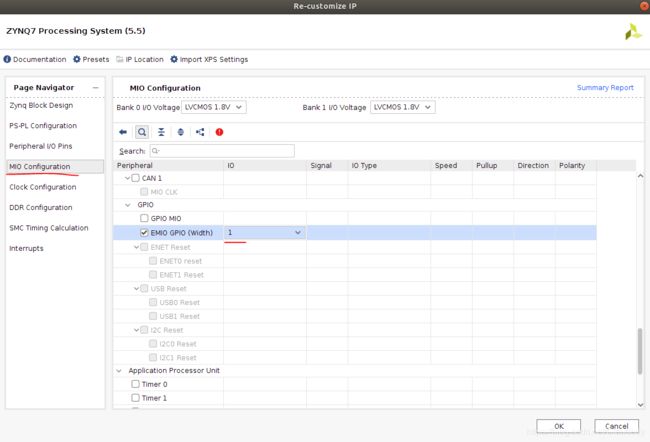
其余配置可保持不变,保存后就可以得到如图的原理图设计。

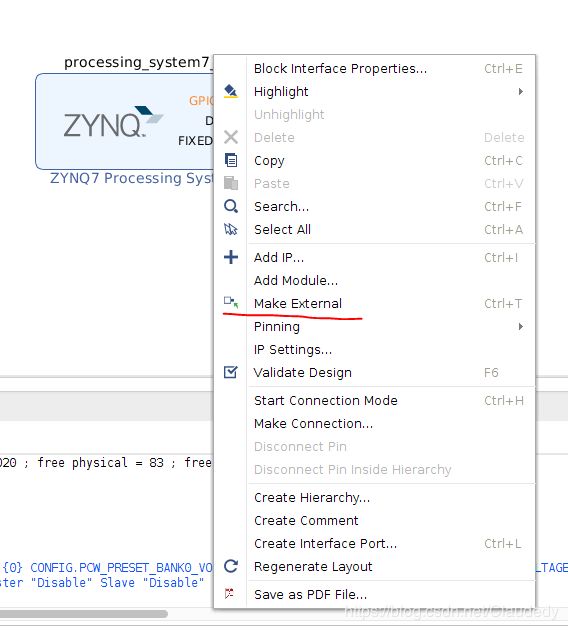
右键GPIO_0,点击 Make External ,为其添加连线,并改名为 emio_gpio 。接着就可以生成顶层文件,关闭窗口。

原理框图设计完成后,需要进行管脚约束设置。点击 Open Elaborated Design ,可以看到如图所示的界面。再点 Window -> I/O Ports ,在界面下面就可以看到IO口的配置窗口。找到刚才命名的emio_gpio口,然后为其分配管脚:N8 (这里的管脚分配要参考具体硬件设计中的管脚编号)。

保存配置,退出窗口后会弹出如下图的窗口,同样将约束文件命名为:emio_gpio。
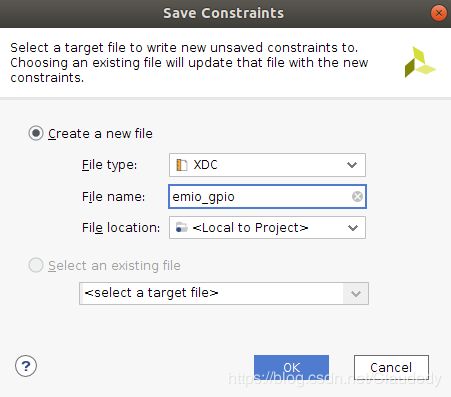
在工程栏中的Sources下的Constraints目录下找到刚才创建的约束文件。然后再添加一行约束代码:
set_property IOSTANDARD LVCMOS18 [get_ports {emio_gpio_tri_io[0]}]
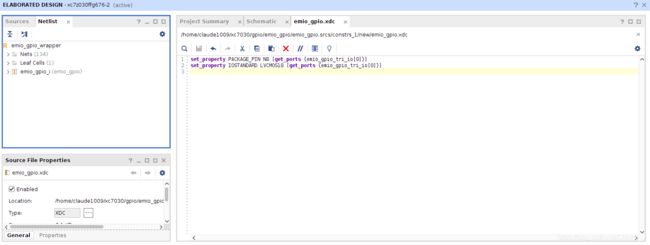 当然,约束文件也可以自己创建编写,不需要经过上面的步骤。打开生成的顶层Verilog文件,找到创建的emio_gpio在代码中的定义。这里如图中所示为:emio_gpio_tri_io。接下来就只需按照约束文件的代码格式编写管脚约束文件即可。
当然,约束文件也可以自己创建编写,不需要经过上面的步骤。打开生成的顶层Verilog文件,找到创建的emio_gpio在代码中的定义。这里如图中所示为:emio_gpio_tri_io。接下来就只需按照约束文件的代码格式编写管脚约束文件即可。
set_property PACKAGE_PIN N8 [get_ports {emio_gpio_tri_io[0]}]
//PACKAGE_PIN是分配管脚,N8就是PL中的管脚名称
set_property IOSTANDARD LVCMOS18 [get_ports {emio_gpio_tri_io[0]}]
//IOSTANDARD是设置IO口的电压标准,LVCMOS18就是1.8V的LVCMOS电压标准。

上面内容都搞定后,就可以生成Bitstream,导出硬件配置,打开SDK软件。

这里同样创建一个应用工程,命名为emio_gpio,并采用Hello World工程模块。就在此模板的基础上进行修改,代码如下:
#include 保存代码SDK就可以自动编译,然后打开PC端的MobaXterm,创建串口。SDK里通过JTAG配置FPGA,下载运行程序,就可以看见 EMIO_GPIO LED ON!!! 和 EMIO_GPIO LED OFF!!! 循环打印,板子上的LED也在不停的亮灭翻转。

- AXI_GPIO控制LED
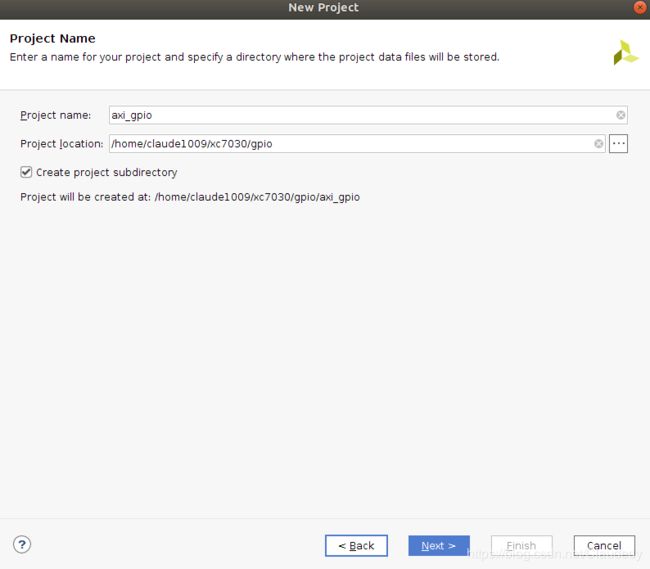
首先打开Vivado创建工程,命名为axi_gpio,并完成工程创建。
进入到Vivado界面后,点击 Create Block Design 按钮,设计命名为axi_gpio。

然后添加 axi_gpio 的IP核,如下图所示。

双击IP核进入到配置窗口,勾选上All Outputs,并设置GPIO Width为1即可。

然后再添加Zynq PS的IP核,并进入到配置窗口。在 PS-PL Configuration 里勾选上 FCLK_RESET0_N 和 M AXI GPIO interface 。因为这里需要用到AXI GP总线,PS是MASTER。

在 Clock Configuration 里勾选上 FCLK_CLK0 50MHz。其余配置可同EMIO配置一样。

配置完成后,点击 Run Connection Automation 和 Run Block Automation ,都勾选上点击OK就行。

Vivado完成自动连线后,就可以看到如图所示的原理框图。保存好设计,然后就可以生成顶层文件。

接下来就是编写管脚约束文件,方法可以和EMIO里提到的一样。这里新建一个约束文件,点击图中的 Add Sources ,在弹出的窗口中选择 Add or create constraints 。

点击 Create File ,新建一个约束文件,并命名为 axi_gpio 。

然后编写相应的管脚约束文件即可。
set_property PACKAGE_PIN N8 [get_ports {axi_gpio_tri_o[0]}]
set_property IOSTANDARD LVCMOS18 [get_ports {axi_gpio_tri_o[0]}]

上面内容都搞定后,就可以生成Bitstream,导出硬件配置,打开SDK软件。

同样创建一个应用工程,命名为axi_gpio,并采用Hello World工程模块。在模板基础上修改代码如下:
#include 保存代码,然后打开PC端的MobaXterm,创建串口。SDK里通过JTAG配置FPGA,下载运行程序,就可以看见 AXI_GPIO LED ON!!! 和 AXI_GPIO LED OFF!!! 循环打印,板子上的LED也在不停的亮灭翻转。

这里要注意一下:在使用MIO或者EMIO时,由于是PS端进行控制,所以头文件是使用"xgpiops.h";而在使用AXI_GPIO时,头文件为"xgpio.h"。
另外,使用EMIO 和 AXI_GPIO时,要记得进行管脚分配,并编写约束文件。