基于opencv的物体定位
opencv是一个很强大的机器视觉库,利用它我们可以开发出丰富多彩的使用项目。近日,我在研究一个图中物体定位系统。本程序用的是OpenCV2.4.9,附带OpenCV3.0。
程序中的原图为我随手拍的一张图片
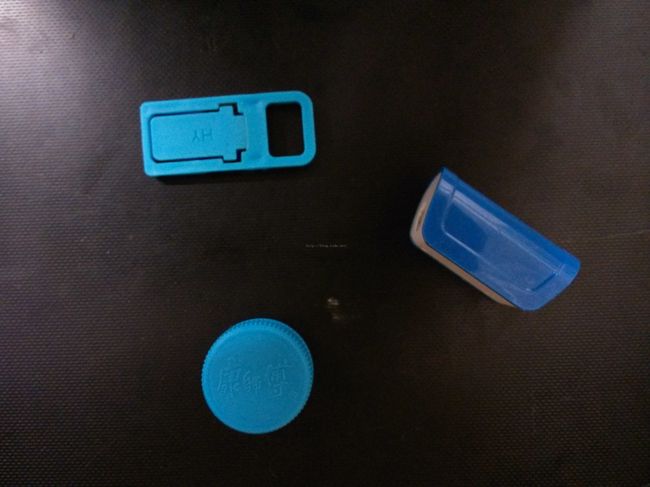
图中有三个物体,都是蓝色的,我首先取原图的蓝色通道变为灰度图

灰度图经过中值滤波后可以得到去噪后的图片

根据原图的蓝色通道和红色通道的大概取值范围,我们可得到比较满意的二值图
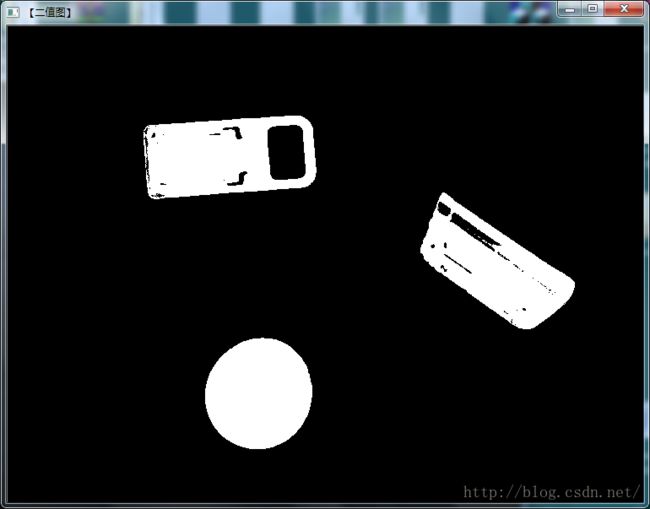
为了去掉物体中少量的黑色部分,我用闭运算

然而,图中最上面的那个物体里面还有一块很大的黑色(目前我也不知道怎么去掉,如果有大神知道望告知~~)
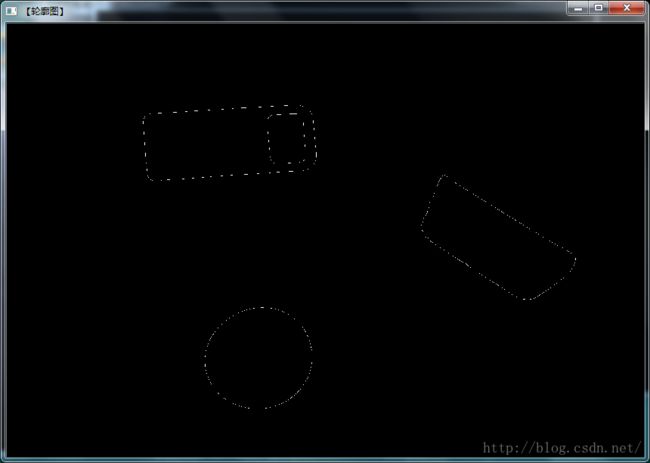
接下来就是找出物体的轮廓
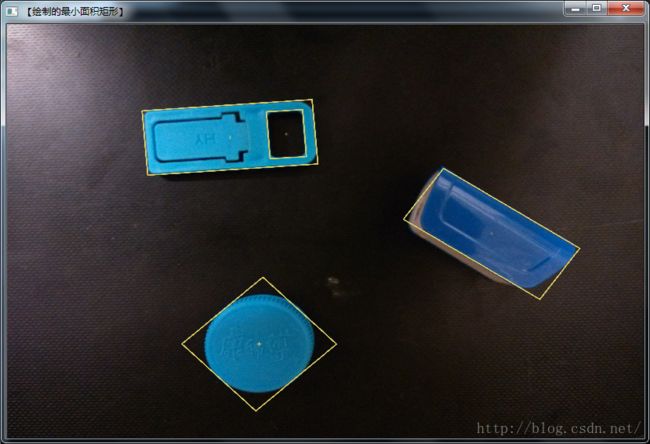
最后找到能包围轮廓的最小矩形
好了,占时就这么多了
下面是配套的程序
OpenCV2.4.9半根
#include
#include
#define BIN_DIV 110
using namespace std;
using namespace cv;
int main()
{
Mat srcImg, midImg, dstImg;
srcImg = imread("hehe.jpg");
Mat xianshi = srcImg.clone();
Mat redChannel;
namedWindow("【原图】", WINDOW_NORMAL);
imshow("【原图】", srcImg);
Mat grayImg;
vector channels;
split(srcImg, channels);
//cvtColor(srcImg,grayImg,COLOR_BGR2GRAY);
grayImg = channels.at(0);
redChannel = channels.at(2);
namedWindow("【灰度图】", WINDOW_NORMAL);
imshow("【灰度图】", grayImg);
//均值滤波
blur(grayImg, grayImg, Size(20, 20), Point(-1, -1));
namedWindow("【均值滤波后】", WINDOW_NORMAL);
imshow("【均值滤波后】", grayImg);
//转化为二值图
Mat midImg1 = grayImg.clone();
int rowNumber = midImg1.rows;
int colNumber = midImg1.cols;
for (int i = 0; i(i); //取第i行的首地址
uchar* redData = redChannel.ptr(i);
for (int j = 0; jBIN_DIV&&redData[j]> contours;
vector hierarchy;
findContours(midImg2, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
int index = 0;
for (; index >= 0; index = hierarchy[index][0])
{
Scalar color(255, 255, 255);
drawContours(midImg3, contours, index, color, NULL, 8, hierarchy);
}
namedWindow("【轮廓图】", WINDOW_NORMAL);
imshow("【轮廓图】", midImg3);
Mat midImg4 = midImg3.clone();
//创建包围轮廓的矩形边界
for (int i = 0; i points = contours[i];
//对给定的2D点集,寻找最小面积的包围矩形
RotatedRect box = minAreaRect(Mat(points));
Point2f vertex[4];
box.points(vertex);
//绘制出最小面积的包围矩形
line(xianshi, vertex[0], vertex[1], Scalar(100, 200, 211), 6, CV_AA);
line(xianshi, vertex[1], vertex[2], Scalar(100, 200, 211), 6, CV_AA);
line(xianshi, vertex[2], vertex[3], Scalar(100, 200, 211), 6, CV_AA);
line(xianshi, vertex[3], vertex[0], Scalar(100, 200, 211), 6, CV_AA);
//绘制中心的光标
Point s1, l, r, u, d;
s1.x = (vertex[0].x + vertex[2].x) / 2.0;
s1.y = (vertex[0].y + vertex[2].y) / 2.0;
l.x = s1.x - 10;
l.y = s1.y;
r.x = s1.x + 10;
r.y = s1.y;
u.x = s1.x;
u.y = s1.y - 10;
d.x = s1.x;
d.y = s1.y + 10;
line(xianshi, l, r, Scalar(100, 200, 211), 2, CV_AA);
line(xianshi, u, d, Scalar(100, 200, 211), 2, CV_AA);
}
namedWindow("【绘制的最小面积矩形】", WINDOW_NORMAL);
imshow("【绘制的最小面积矩形】", xianshi);
waitKey(0);
return 0;
} OpenCV3.0版本
#include
#include
#define BIN_DIV 120
using namespace std;
using namespace cv;
int main()
{
Mat srcImg=imread("haha.jpg");
Mat xianshi=srcImg.clone();
Mat redChannel;
namedWindow("【原图】",WINDOW_NORMAL);
imshow("【原图】",srcImg);
Mat grayImg;
vector channels;
split(srcImg,channels);
//cvtColor(srcImg,grayImg,COLOR_BGR2GRAY);
grayImg=channels.at(0);
redChannel=channels.at(2);
namedWindow("【灰度图】",WINDOW_NORMAL);
imshow("【灰度图】",grayImg);
//均值滤波
blur(grayImg,grayImg,Size(20,20),Point(-1,-1));
namedWindow("【均值滤波后】",WINDOW_NORMAL);
imshow("【均值滤波后】",grayImg);
//转化为二值图
Mat midImg1=grayImg.clone();
int rowNumber=midImg1.rows;
int colNumber=midImg1.cols;
for(int i=0;i(i); //取第i行的首地址
uchar* redData=redChannel.ptr(i);
for(int j=0;jBIN_DIV&&redData[j]> contours;
vector hierarchy;
findContours(midImg2,contours,hierarchy,RETR_CCOMP,CHAIN_APPROX_SIMPLE);
int index=0;
for(;index>=0;index=hierarchy[index][0])
{
Scalar color(255,255,255);
drawContours(midImg3,contours,index,color,NULL,8,hierarchy);
}
namedWindow("【轮廓图】",WINDOW_NORMAL);
imshow("【轮廓图】",midImg3);
Mat midImg4=midImg3.clone();
//创建包围轮廓的矩形边界
for(int i=0;i points=contours[i];
//对给定的2D点集,寻找最小面积的包围矩形
RotatedRect box=minAreaRect(Mat(points));
Point2f vertex[4];
box.points(vertex);
//绘制出最小面积的包围矩形
line(xianshi,vertex[0],vertex[1],Scalar(100,200,211),6,LINE_AA);
line(xianshi,vertex[1],vertex[2],Scalar(100,200,211),6,LINE_AA);
line(xianshi,vertex[2],vertex[3],Scalar(100,200,211),6,LINE_AA);
line(xianshi,vertex[3],vertex[0],Scalar(100,200,211),6,LINE_AA);
//绘制中心的光标
Point s1,l,r,u,d;
s1.x=(vertex[0].x+vertex[2].x)/2.0;
s1.y=(vertex[0].y+vertex[2].y)/2.0;
l.x=s1.x-10;
l.y=s1.y;
r.x=s1.x+10;
r.y=s1.y;
u.x=s1.x;
u.y=s1.y-10;
d.x=s1.x;
d.y=s1.y+10;
line(xianshi,l,r,Scalar(100,200,211),2,LINE_AA);
line(xianshi,u,d,Scalar(100,200,211),2,LINE_AA);
}
namedWindow("【绘制的最小面积矩形】",WINDOW_NORMAL);
imshow("【绘制的最小面积矩形】",xianshi);
waitKey(0);
return 0;
}