Android P之Camera HAL3流程分析(0)
目录
参考文献
注册CameraProvider服务
注册cameraserver服务
类和服务调用
参考文献
[Android O] Camera 服务启动流程简析
[Android O] HAL3 之 Open Camera2 流程(零)—— 概览
[Android O] HAL3 之 Open Camera2 流程(一)—— 从 App 到 CameraService
[Android O] HAL3 之 Open Camera2 流程(二)—— 从 CameraService 到 HAL Service
[Android O] HAL3 之 Open Camera2 流程(三,完结)—— 从 HAL Service 到 Camera HAL
android6.0源码分析之Camera API2.0简介
android6.0源码分析之Camera2 HAL分析
android6.0源码分析之Camera API2.0下的初始化流程分析
android6.0源码分析之Camera API2.0下的Preview(预览)流程分析
android6.0源码分析之Camera API2.0下的Capture流程分析
android6.0源码分析之Camera API2.0下的video流程分析
Camera API2.0的应用
Android Camera:总结
Android camera子系统HAL层介绍集锦
Android 8.0系统源码分析--相机createCaptureSession创建过程源码分析
高通平台
Camera2 数据流从framework到Hal源码分析
mm-camera层frame数据流源码分析
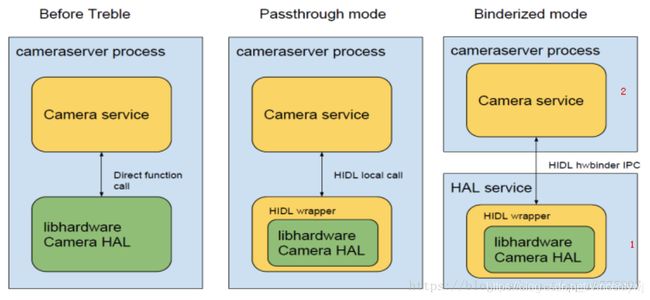
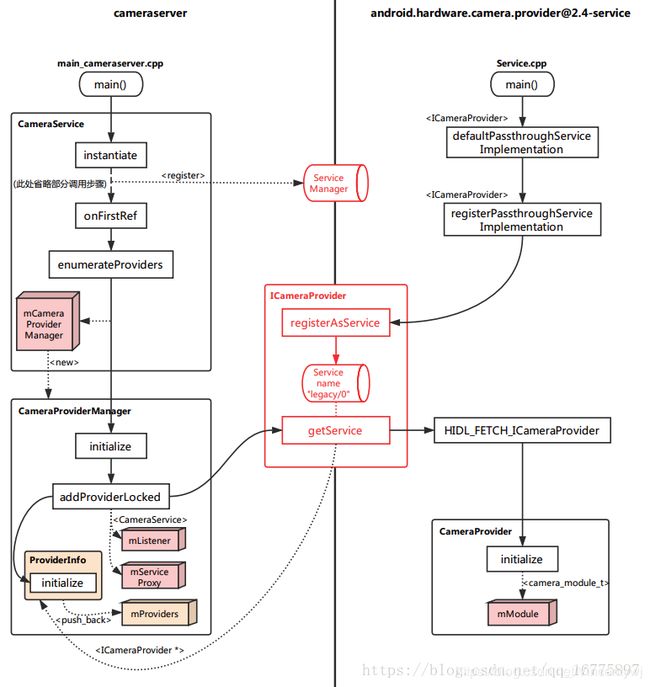
在 Android O 中,系统启动时,就会启动 CameraProvider 服务。它将 Camera HAL 从 cameraserver 进程中分离出来,作为一个独立进程 [email protected] 来控制 HAL。这两个进程之间通过 HIDL 机制进行通信。
这样的改动源自于 Android O 版本加入的 Treble 机制,它的主要功能(如下图所示)是将 service 与 HAL 隔离,以方便 HAL 部分进行独立升级。这其实和 APP 与 Framework 之间的 Binder 机制类似,通过引入一个进程间通信机制而针对不同层级进行解耦(从 Local call 变成了 Remote call)。
注册CameraProvider服务
创建服务端的 CameraProviderImpl 对象,后续client端会调用。
hardware/interfaces/camera/provider/2.4/default/[email protected]_64.rc
service vendor.camera-provider-2-4 /vendor/bin/hw/[email protected]_64
class hal
user cameraserver
group audio camera input drmrpc
ioprio rt 4
capabilities SYS_NICE
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/taskshardware/interfaces/camera/provider/2.4/default/service.cpp
int main()
{
android::ProcessState::initWithDriver("/dev/vndbinder"); //打开vndservicemanager服务,可以和其它vendor进程通信
return defaultPassthroughServiceImplementation
}
system/libhidl/transport/include/hidl/LegacySupport.h
template
status_t defaultPassthroughServiceImplementation(std::string name, size_t maxThreads = 1) {
/* 第一次执行这个函数会open(/dev/hwbinder) */
configureRpcThreadpool(maxThreads, true);
/* 这个函数做了两件事:
* 1、得到了 CameraProvider 实例化对象
* 2、注册 CameraProvider 实例化对象 */
status_t result = registerPassthroughServiceImplementation
joinRpcThreadpool();
}
template
status_t registerPassthroughServiceImplementation(std::string name = "default") {
/* 就是调用 ICameraProvider::getService()
* getStub = ture 时,getservice 以 passthrough 模式打开 HAL 实现
* 所以这个会得到CameraProvider实例化对象(不是binder代理)
*/
sp
/*将 CameraProvider 注册为一个服务
* 其他进程需要使用 camera HAL层时通过binder得到CameraProvider代理类即可操作camera HAL层
* 不需要像以前一样每次都 dlopen(xxx.so)
*/
status_t status = service->registerAsService(name);
}
-----------------------------------------------------------------------------------------------------------------------------------
/* CameraProviderAll.cpp */
::android::status_t ICameraProvider::registerAsService(const std::string &serviceName) {
::android::hardware::details::onRegistration("[email protected]", "ICameraProvider", serviceName);
/*
* 得到 BpHwServiceManager 对象
* 就是 HwServiceManager 对象的 binder 代理
* 后面会分析如何得到 BpHwServiceManager 对象
*/
const ::android::sp<::android::hidl::manager::V1_0::IServiceManager> sm
= ::android::hardware::defaultServiceManager();
/*
* 调用 BpHwServiceManager::add() 注册服务
* 后面分析
*/
::android::hardware::Return
return ret.isOk() && ret ? ::android::OK : ::android::UNKNOWN_ERROR;
}
CameraProviderAll.cpp来自hardware/interfaces/camera/provider/2.4/ICameraProvider.hal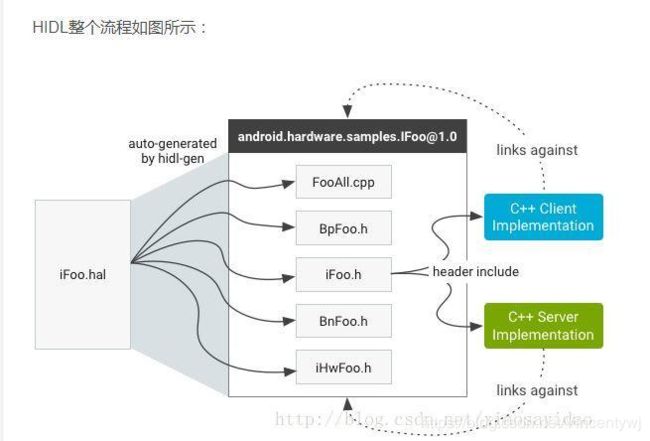
-----------------------------------------------------------------------------------------------------------------------------------
Camera HAL的实现
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/depend/Android.mk
LOCAL_MODULE := [email protected]
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/depend/instance.cpp
ICameraProvider*
HIDL_FETCH_ICameraProvider(const char* name){
return createICameraProvider_V2_4(name, getCameraDeviceManager());
}
ICameraProvider*
createICameraProvider_V2_4(const char* providerName, NSCam::ICameraDeviceManager* manager){
auto provider = new CameraProviderImpl(providerName, manager);
provider->initialize();
return provider;
}
获得CameraDeviceManager对象
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/depend/instance.cpp
NSCam::ICameraDeviceManager*
getCameraDeviceManager(){
static NSCam::CameraDeviceManagerImpl singleton(getProviderType().c_str());
static bool init = singleton.initialize();
return &singleton;
}
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/CameraDeviceManagerBase.cpp
CameraDeviceManagerBase::
initialize(){
auto loadDeviceFactory = [](char const* libname, char const* symbol) {
VirtEnumDeviceFactory item;
item.mLibHandle = ::dlopen(libname, RTLD_NOW);
*(void **)(&item.mCreateVirtualCameraDevice) = ::dlsym(item.mLibHandle, symbol);
return item;
};
//从动态库中加载 createVirtualCameraDevice 函数的实现赋值给 mCreateVirtualCameraDevice
mVirtEnumDeviceFactoryMap[3] = loadDeviceFactory("libmtkcam_device3.so", "createVirtualCameraDevice");
enumerateDevicesLocked();
}
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/CameraDeviceManagerBase_camera.cpp
CameraDeviceManagerBase::
enumerateDevicesLocked(){
onEnumerateDevicesLocked();
}
CameraDeviceManagerImpl::
onEnumerateDevicesLocked(){
IHalLogicalDeviceList* pHalDeviceList;
//加载libmtkcam_modulefactory_utils.so
pHalDeviceList = MAKE_HalLogicalDeviceList();
size_t const deviceNum = pHalDeviceList->searchDevices();
mVirtEnumDeviceMap.setCapacity(deviceNum*2);
//构造多个CameraDevice3Impl并保存到mVirtEnumDeviceMap中,通过instanceId区别
for (size_t instanceId = 0; instanceId < deviceNum; instanceId++)
{
sp
//创建MetadataProvider
pMetadataProvider = IMetadataProvider::create(instanceId);
NSMetadataProviderManager::add(instanceId, pMetadataProvider.get());
// 获得对应deviceid的元数据信息
addVirtualDevicesLocked(instanceId, pMetadataProvider);
}
}
-----------------------------------------------------------------------------------------------------------------------------------
//创建MetadataProvider
alps/vendor/mediatek/proprietary/hardware/mtkcam/utils/metastore/metadataprovider/MetadataProvider.cpp
IMetadataProvider*
IMetadataProvider::
create( int32_t const i4OpenId ){
MetadataProvider* p = new MetadataProvider(i4OpenId);
//初始化
p->onCreate();
return p;
}
MetadataProvider::
MetadataProvider( int32_t const i4OpenId ){
IHalLogicalDeviceList* pHalDeviceList;
pHalDeviceList = MAKE_HalLogicalDeviceList();
int32_t sensorType = pHalDeviceList->queryType(i4OpenId);
int32_t sensorDev = pHalDeviceList->querySensorDevIdx(i4OpenId);
const char* sensorDrvName = pHalDeviceList->queryDriverName(i4OpenId);
mInfo = Info(i4OpenId, sensorDev, sensorType, sensorDrvName);
showCustInfo();
}
MetadataProvider::
onCreate(){
IMetadataTagSet mtagInfo;
//根据IMetadataTagSet获得IMetadataConverter用于解析,定义了宏 _IMP_TAGCONVERT_ 使用宏填充数据
setTagInfo(mtagInfo);
//构造IMetadataConverter对象
sp
//使用IMetadataConverter初始化camera_metadata和IMetadata
status = constructStaticMetadata(pMetadataConverter, mpStaticCharacteristics, mpHALMetadata);
}
bool setTagInfo(IMetadataTagSet &rtagInfo){
#define _IMP_SECTION_INFO_(...)
#define _IMP_TAG_INFO_(_tag_, _type_, _name_) \
rtagInfo.addTag(_tag_, _name_, Type2TypeEnum<_type_>::typeEnum);
#include
#include
#define _IMP_TAGCONVERT_(_android_tag_, _mtk_tag_) \
rtagInfo.addTagMap(_android_tag_, _mtk_tag_);
//调用TagMap.h定义的宏,由于已经定义了_IMP_TAGCONVERT_所以执行rtagInfo.addTagMap方法
ADD_ALL_MEMBERS;
}
IMetadataConverter::
createInstance(IMetadataTagSet const &pTagInfo){
return new MetadataConverter(pTagInfo);
}
MetadataConverter::
MetadataConverter(IMetadataTagSet const &pTagInfo)
: mpTagInfo(pTagInfo){
}
//constructStaticMetadata的实现
MetadataProvider::
constructStaticMetadata(sp
impConstructStaticMetadata(mtkMetadata)
//从IHalSensorList 获得IMetadata
IMetadata sensorMetadata = MAKE_HalLogicalDeviceList()->queryStaticInfo(mInfo.getDeviceId());
auto pHalDeviceList = MAKE_HalLogicalDeviceList();
auto physicIdsList = pHalDeviceList->getSensorId(mInfo.getDeviceId());
auto pDngInfo = MAKE_DngInfo(LOG_TAG, physicIdsList[0]);
IMetadata rDngMeta = pDngInfo->getStaticMetadata();
//往参数IMetadata里添加数据
sensorMetadata += rDngMeta;
for (size_t i = 0; i < sensorMetadata.count(); i++)
{
IMetadata::Tag_t mTag = sensorMetadata.entryAt(i).tag();
mtkMetadata.update(mTag, sensorMetadata.entryAt(i));
}
updateData(mtkMetadata);
//调用参数pConverter的方法继续对IMetadata和camera_metadata处理
pConverter->convert(mtkMetadata, rpDstMetadata);
::sort_camera_metadata(rpDstMetadata);
}
alps/vendor/mediatek/proprietary/hardware/mtkcam/utils/metadata/conversion/TypeConvert.androidMetadata.cpp
convert函数主要实现转化IMetadata --> camera_metadata
MetadataConverter::
convert(const IMetadata &rMetadata, camera_metadata* &pDstMetadata, size_t* pDstSize)
后续可以通过MetadataProvider对象获得camera_metadata
alps/vendor/mediatek/proprietary/hardware/mtkcam/utils/metastore/metadataprovider/MetadataProvider.h
camera_metadata const* getStaticCharacteristics() const { return mpStaticCharacteristics; }
-----------------------------------------------------------------------------------------------------------------------------------
addVirtualDevicesLocked的实现
将创建的CameraDevice3Impl对象封装成VirtEnumDevice对象,保存在 mVirtEnumDeviceMap
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/CameraDeviceManagerBase_camera.cpp
CameraDeviceManagerBase::
addVirtualDevicesLocked(uint32_t const instanceId, ::android::sp
{
auto add_virtual_device = [&](IVirtualDevice* pVirtualDevice){
if ( pVirtualDevice != nullptr ) {
if ( auto pInfo = new VirtEnumDevice ) {
if ( pVirtualDevice->hasFlashUnit() ) {
mIsSetTorchModeSupported = true;
pInfo->mTorchModeStatus = (uint32_t)ETorchModeStatus::AVAILABLE_OFF;
}
pInfo->mVirtDevice = pVirtualDevice;
pInfo->mInstanceId = pVirtualDevice->getInstanceId();
mVirtEnumDeviceMap.add(pVirtualDevice->getInstanceName(), pInfo);
}
}
};
auto create_and_add_virtual_device = [&](uint32_t majorVersion){
//调用 createVirtualCameraDevice 函数创建 CameraDevice3Impl
auto create_device = mVirtEnumDeviceFactoryMap[majorVersion].mCreateVirtualCameraDevice;
CreateVirtualCameraDeviceParams param = {
.instanceId = static_cast
.deviceType = mType.c_str(),
.pMetadataProvider = pMetadataProvider.get(),
.pDeviceManager = this,
};
//调用CameraDevice3Factory获得CameraDevice3Impl
auto new_device = create_device(¶m);
//将CameraDevice3Impl保存在数组中
add_virtual_device(new_device);
};
create_and_add_virtual_device(3);
}
-----------------------------------------------------------------------------------------------------------------------------------
create_device的具体实现
创建CameraDevice3Impl对象
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/device/3.x/device/CameraDevice3Factory.cpp
createVirtualCameraDevice(CreateVirtualCameraDeviceParams* params){
auto pDevice = new CameraDevice3Impl(
params->pDeviceManager,
params->pMetadataProvider,
params->deviceType,
params->instanceId
);
//CameraDevice3Impl提供mStaticDeviceInfo和mMetadataConverter
NSCam::ICameraDevice3Session::CreationInfo const info = {
.mDeviceManager = params->pDeviceManager,
.mStaticDeviceInfo = pDevice->getStaticDeviceInfo(),
.mMetadataProvider = params->pMetadataProvider,
.mMetadataConverter = pDevice->getMetadataConverter(),
};
//初始化CameraDevice3Impl,同时构造CameraDevice3SessionImpl
bool bInitSuccess = pDevice->initialize(createCameraDevice3Session(info));
return pDevice;
}
CameraDevice3Impl的构造函数,继承ICameraDevice,保存变量mMetadataProvider,mMetadataConverter,mStaticDeviceInfo
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/device/3.x/device/CameraDevice3Impl.cpp
CameraDevice3Impl::
CameraDevice3Impl(
ICameraDeviceManager* deviceManager,
IMetadataProvider* metadataProvider,
char const* deviceType,
int32_t instanceId
) : ICameraDevice()
, mDeviceManager(deviceManager)
, mMetadataProvider(metadataProvider)
, mMetadataConverter(IMetadataConverter::createInstance(IDefaultMetadataTagSet::singleton()->getTagSet()))
{
mStaticDeviceInfo = std::make_shared
if (mStaticDeviceInfo != nullptr) {
mStaticDeviceInfo->mInstanceId = instanceId;
mStaticDeviceInfo->mMajorVersion = kMajorDeviceVersion;
mStaticDeviceInfo->mMinorVersion = kMinorDeviceVersion;
mStaticDeviceInfo->mHasFlashUnit = metadataProvider->getDeviceHasFlashLight();
}
}
createCameraDevice3Session的实现
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/device/3.x/device/CameraDevice3SessionImpl.cpp
NSCam::ICameraDevice3Session*
createCameraDevice3Session(
NSCam::ICameraDevice3Session::CreationInfo const& info ){
return new NSCam::v3::CameraDevice3SessionImpl(info);
}
CameraDevice3SessionImpl的构造函数,继承ICameraDevice3Session,将相机的底层信息保存在mStaticInfo中
CameraDevice3SessionImpl(CreationInfo const& info)
: ICameraDevice3Session()
, mStaticInfo(info)
, mAppStreamManagerErrorState(std::make_shared
, mAppStreamManagerWarningState(std::make_shared
, mAppStreamManagerDebugState(std::make_shared
{
}
构造CameraDevice3SessionImpl之后用来初始化CameraDevice3Impl
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/device/3.x/device/CameraDevice3Impl.cpp
CameraDevice3Impl::
initialize(
const ::android::sp
){
mSession = session;//保存CameraDevice3SessionImpl,后续作为CameraDevice3Impl的代理
return true;
}
-----------------------------------------------------------------------------------------------------------------------------------
经过以上步骤实现了将多个CameraDevice3Impl并保存到CameraDeviceManager的数组mVirtEnumDeviceMap中,而CameraProvider会保存CameraDeviceManager,这样client端可以通过调用CameraProvider->CameraDeviceManager->CameraDevice3Impl->CameraDevice3SessionImpl->mStaticInfo。
=================================================================================================
注册cameraserver服务
CameraService会创建CameraProviderManager对象,然后进行initialize
alps/frameworks/av/camera/cameraserver/cameraserver.rc
service cameraserver /system/bin/cameraserver
class main
user cameraserver
group audio camera input drmrpc
ioprio rt 4
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/tasks
alps/frameworks/av/camera/cameraserver/main_cameraserver.cpp
域名 android
int main(int argc __unused, char** argv __unused){
// Set 3 threads for HIDL calls
/* open(/dev/binder),用于和BnServiceManager通信
* open(/dev/hwbinder),用于和BnHwServiceManager通信
*/
hardware::configureRpcThreadpool(3, /*willjoin*/ false);
sp
/* 获得 ServiceManager 的代理类 BpServiceManager, 注意不是 HwServiceManager 的代理类
* ServiceManager 这个服务管理器是用来跟上层交互的,原理跟 HwServiceManager一样
*/
sp
CameraService::instantiate();
}
-----------------------------------------------------------------------------------------------------------------------------------
hardware::configureRpcThreadpool的实现,打开/dev/hwbinder
域名 android:hardware
可以打开/dev/hwbinder
system/libhidl/transport/HidlTransportSupport.cpp
void configureRpcThreadpool(size_t maxThreads, bool callerWillJoin) {
configureBinderRpcThreadpool(maxThreads, callerWillJoin);
}
system/libhidl/transport/HidlBinderSupport.cpp
void configureBinderRpcThreadpool(size_t maxThreads, bool callerWillJoin) {
ProcessState::self()->setThreadPoolConfiguration(maxThreads, callerWillJoin /*callerJoinsPool*/);
}
域名 android:hardware
system/libhwbinder/ProcessState.cpp
sp
{
if (gProcess != NULL) {
return gProcess;
}
gProcess = new ProcessState(DEFAULT_BINDER_VM_SIZE);
return gProcess;
}
ProcessState::ProcessState(size_t mmap_size)
: mDriverFD(open_driver()){
if (mDriverFD >= 0) {
// mmap the binder, providing a chunk of virtual address space to receive transactions.
mVMStart = mmap(0, mMmapSize, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
}
}
static int open_driver(){
int fd = open("/dev/hwbinder", O_RDWR | O_CLOEXEC);
if (fd >= 0) {
int vers = 0;
status_t result = ioctl(fd, BINDER_VERSION, &vers);
size_t maxThreads = DEFAULT_MAX_BINDER_THREADS;
result = ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads);
}
return fd;
}
-----------------------------------------------------------------------------------------------------------------------------------
ProcessState::self()的实现,打开/dev/binder
域名 android
支持打开/dev/binder和/dev/vndbinder,未指定时,默认打开/dev/binder
/frameworks/native/libs/binder/ProcessState.cpp
sp
{
if (gProcess != NULL) {
return gProcess;
}
gProcess = new ProcessState("/dev/binder");
return gProcess;
}
-----------------------------------------------------------------------------------------------------------------------------------
defaultServiceManager()的实现
defaultServiceManager的实现容易混淆,系统中有两个实现,在调用时需要注意方法所在的域,
- android:defaultServiceManager可以获的BpServiceManager,
- android:hardware:defaultServiceManager可以获的BpHwServiceManager,之后介绍
frameworks/native/libs/binder/IServiceManager.cpp
namespace android
sp
if (gDefaultServiceManager != NULL) return gDefaultServiceManager;
{
while (gDefaultServiceManager == NULL) {
gDefaultServiceManager = interface_cast
ProcessState::self()->getContextObject(NULL));
if (gDefaultServiceManager == NULL)
sleep(1);
}
}
return gDefaultServiceManager;
}
-----------------------------------------------------------------------------------------------------------------------------------
CameraService::instantiate()的实现,将CameraService注册到ServiceManager
/*BinderService 是 CameraService 的父类,模板类 SERVICE = CameraService*/
template
class BinderService {
static void instantiate() {/* 类属性的, 所以可以直接调用 */
publish();
}
static status_t publish(bool allowIsolated = false) {
/* 得到ServiceManager的代理类BpServiceManager
*/
sp
/* SERVICE = CameraService, 注册CameraService 实例化对象
*/
return sm->addService( String16(SERVICE::getServiceName()),
/*new CameraService() 得到实例化对象,智能指针第一次引用回调用 onFirstRef() 函数, 后面分析
*/
new SERVICE(), allowIsolated);
}
};
-----------------------------------------------------------------------------------------------------------------------------------
onFirstRef的实现,流程比较长,所以放在后面来分析。
void CameraService::onFirstRef(){
BnCameraService::onFirstRef();
enumerateProviders();
CameraService::pingCameraServiceProxy();
}
status_t CameraService::enumerateProviders() {
status_t res;
std::vector
{
mCameraProviderManager = new CameraProviderManager();
mCameraProviderManager->initialize(this);//初始化
mCameraProviderManager->setUpVendorTags();
mFlashlight = new CameraFlashlight(mCameraProviderManager, this);//构造闪光灯
mFlashlight->findFlashUnits();
deviceIds = mCameraProviderManager->getCameraDeviceIds();//遍历mProviders
}
for (auto& cameraId : deviceIds) {
String8 id8 = String8(cameraId.c_str());
onDeviceStatusChanged(id8, CameraDeviceStatus::PRESENT);
}
}
alps/frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.cpp
const std::string kLegacyProviderName("legacy/0");
const std::string kExternalProviderName("external/0");
跨进程调用CameraProvider服务,configureRpcThreadpool中已打开/dev/hwbinder节点
status_t CameraProviderManager::initialize(wp
ServiceInteractionProxy* proxy) {
mListener = listener; /* listener = CameraService 对象 */
mServiceProxy = proxy; //默认值proxy=sHardwareServiceInteractionProxy
bool success = mServiceProxy->registerForNotifications(this);
addProviderLocked(kLegacyProviderName, /*expected*/ false);
addProviderLocked(kExternalProviderName, /*expected*/ false);
}
-----------------------------------------------------------------------------------------------------------------------------------
mServiceProxy的赋值,上面是CameraProviderManager的初始化过程,CameraProviderManager就是管理camera Service与camera provider之间通信的工程管理类,两个参数,其中第二个参数就是远程代理类。这个参数已经是默认赋值了。
status_t initialize(wp
ServiceInteractionProxy *proxy = &sHardwareServiceInteractionProxy);
这是定义,默认值就是 sHardwareServiceInteractionProxy,这个sHardwareServiceInteractionProxy是HardwareServiceInteractionProxy的实例,可以看出在HardwareServiceInteractionProxy定义中,已经直接调用了ICameraProvider--->getService()了。
frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.h
struct HardwareServiceInteractionProxy : public ServiceInteractionProxy {
virtual bool registerForNotifications(
const std::string &serviceName,
const sp
¬ification) override {
return hardware::camera::provider::V2_4::ICameraProvider::registerForNotifications(
serviceName, notification);
}
virtual sp
const std::string &serviceName) override {
/* 调用了 ICameraProvider::getService()
* 且 getStub 为默认值 getStub = flase,会得到 CameraProvider 的代理类(binder)
*/
return hardware::camera::provider::V2_4::ICameraProvider::getService(serviceName);
}
};
out/soong/.intermediates/hardware/interfaces/camera/provider/2.4/[email protected]_genc++/gen/android/hardware/camera/provider/CameraProviderAll.cpp
::android::sp
using ::android::hardware::defaultServiceManager;//指定了域
using ::android::hardware::details::waitForHwService;
using Transport = ::android::hidl::manager::V1_0::IServiceManager::Transport;
const sp<::android::hidl::manager::V1_0::IServiceManager> sm = defaultServiceManager();//获的BpHwServiceManager
Return
Transport transport = transportRet;
for (int tries = 0; !getStub && (vintfHwbinder || (vintfLegacy && tries == 0)); tries++) {
/*
* getStub = flase 才走这个分支
* getService 会先获取 binder 服务,如果失败了才会获取 passthrough 服务
*/
/* 获取 CameraProvider 代理类对象(binder) */
Return
sm->get(ICameraProvider::descriptor, serviceName);
sp<::android::hidl::base::V1_0::IBase> base = ret;
/* 转换为 BpHwCameraProvider 对象 */
Return
iface = castRet;
/* 所以这里返回的是 BpHwCameraProvider 对象 */
return iface;
}
}
android:hardware:defaultServiceManager可以获的BpHwServiceManager
sp
return defaultServiceManager1_1();
}
sp
{
if (details::gDefaultServiceManager != nullptr) {
return details::gDefaultServiceManager;
}
if (access("/dev/hwbinder", F_OK|R_OK|W_OK) != 0) {
// HwBinder not available on this device or not accessible to this process.
return nullptr;
}
while (details::gDefaultServiceManager == nullptr) {
details::gDefaultServiceManager =
fromBinder
ProcessState::self()->getContextObject(nullptr));
if (details::gDefaultServiceManager == nullptr) {
LOG(ERROR) << "Waited for hwservicemanager, but got nullptr.";
sleep(1);
}
}
}
return details::gDefaultServiceManager;
}
这里通过sm->get(ICameraProvider::descriptor, serviceName)查询ICameraProvider这个hidl服务,得到IBase对象后,在通过ICameraProvider::castFrom转换为ICameraProvider对象。
上述分析,显然上层 framework 通过 ServiceManager( /dev/binder ) 得到 CameraService 服务,而
CameraService 通过 HwServiceManager( /dev/hwbinder ) 得到 CameraProvider 服务,而 CameraProvider 与 Camera HAL 绑定。这样上层 framework 就能够访问 Camera HAL 层了
-----------------------------------------------------------------------------------------------------------------------------------
status_t CameraProviderManager::addProviderLocked(const std::string& newProvider, bool expected) {
sp
interface = mServiceProxy->getService(newProvider);//获取服务端的 interface = CameraProviderImpl
sp
status_t res = providerInfo->initialize();
mProviders.push_back(providerInfo);
}
CameraProviderManager::ProviderInfo::ProviderInfo(
const std::string &providerName,
sp
CameraProviderManager *manager) :
mProviderName(providerName),
mInterface(interface),
mManager(manager) {
}
status_t CameraProviderManager::ProviderInfo::initialize() {
status_t res = parseProviderName(mProviderName, &mType, &mId); //获得CameraProviderImpl的类型和ID
hardware::Return
std::vector
//回调函数作为形参,回调函数的形参为idStatus和cameraDeviceNames,返回值status和devices
hardware::Return
Status idStatus,
const hardware::hidl_vec
status = idStatus;
if (status == Status::OK) {
for (size_t i = 0; i < cameraDeviceNames.size(); i++) {
devices.push_back(cameraDeviceNames[i]);
}
} });
sp
for (auto& device : devices) {
std::string id;
status_t res = addDevice(device,
hardware::camera::common::V1_0::CameraDeviceStatus::PRESENT, &id);
}
return OK;
}
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/provider/2.4/CameraProviderImpl.cpp
CameraProviderImpl::
getCameraIdList(getCameraIdList_cb _hidl_cb){
std::vector
auto status = mManager->getDeviceNameList(deviceNameList);//需要确认
hidl_vec
hidlDeviceNameList.resize(deviceNameList.size());
for (size_t i = 0; i < deviceNameList.size(); i++) {
hidlDeviceNameList[i] = deviceNameList[i];
}
_hidl_cb(mapToHidlCameraStatus(status), hidlDeviceNameList);
return Void();
}
获的deviceNames
status_t CameraProviderManager::ProviderInfo::addDevice(const std::string& name,
CameraDeviceStatus initialStatus, /*out*/ std::string* parsedId) {
//根据设备名称获的设备号和类型
status_t res = parseDeviceName(name, &major, &minor, &type, &id);
//遍历mProviders验证设备是否已经存在,每个mProviders中包含多个设备
if (mManager->isValidDeviceLocked(id, major)) {
return BAD_VALUE;
}
std::unique_ptr
switch (major) {
case 1:
deviceInfo = initializeDeviceInfo
id, minor);
break;
case 3:
deviceInfo = initializeDeviceInfo
id, minor);
break;
}
//将DeviceInfo保存在mDevices数组中
mDevices.push_back(std::move(deviceInfo));
return OK;
}
std::unique_ptr
CameraProviderManager::ProviderInfo::initializeDeviceInfo(
const std::string &name, const metadata_vendor_id_t tagId,
const std::string &id, uint16_t minorVersion){
auto cameraInterface = getDeviceInterface
//其中 cameraInterface 等于CameraDevice3Impl
return std::unique_ptr
new DeviceInfoT(name, tagId, id, minorVersion, resourceCost, cameraInterface));
}
DeviceInfoT的构造函数?
mInterface = CameraDevice3Impl
sp
CameraProviderManager::ProviderInfo::getDeviceInterface
sp
//name和回调函数为实参,回调函数的返回值status和cameraInterface,回调函数的参数s和interface
ret = mInterface->getCameraDeviceInterface_V3_x(name, [&status, &cameraInterface](
Status s, sp
status = s;
cameraInterface = interface; //interface = CameraDevice3Impl
});
return cameraInterface;
}
跨进程调用CameraProviderImpl
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/provider/2.4/CameraProviderImpl.cpp
class CameraProviderImpl
: public ICameraProvider
, public android::hardware::hidl_death_recipient
, public NSCam::ICameraDeviceManager::Callback
CameraProviderImpl::
getCameraDeviceInterface_V3_x(
const hidl_string& cameraDeviceName,
getCameraDeviceInterface_V3_x_cb _hidl_cb){
getCameraDeviceInterface<::android::hardware::camera::device::V3_2::ICameraDevice>(cameraDeviceName, _hidl_cb);
return Void();
}
CameraProviderImpl::
getCameraDeviceInterface(
const hidl_string& cameraDeviceName,
InterfaceCallbackT _hidl_cb
){
::android::sp
auto status = mManager->getDeviceInterface(cameraDeviceName, pBaseDevice);
auto pICameraDevice = ::android::sp
_hidl_cb(mapToHidlCameraStatus(status), pICameraDevice);//调用回调函数赋值 cameraInterface = pICameraDevice
}
从mVirtEnumDeviceMap取出VirtEnumDevice对象,然后获得CameraDevice3Impl对象
alps/vendor/mediatek/proprietary/hardware/mtkcam3/main/hal/devicemgr/CameraDeviceManagerBase.cpp
CameraDeviceManagerBase::
getDeviceInterface(
const std::string& deviceName,
::android::sp
){
auto const& pInfo = mVirtEnumDeviceMap.valueFor(deviceName);
auto const& pDevice = pInfo->mVirtDevice; //CameraDevice3Impl
us_t status = pDevice->getDeviceInterfaceBase(rpDevice);
}
CameraDevice3Impl::
getDeviceInterfaceBase(
::android::sp
){
rpDevice = const_cast
return android::OK;
}
通过以上流程cameraserver包含CameraProviderManager,CameraProviderManager包含mProviders,mProviders包含ProviderInfo,ProviderInfo包含mDevices,mDevices包含DeviceInfo,DeviceInfo包含DeviceInfoT,DeviceInfoT包含CameraDevice3Impl。
总体逻辑顺序:
- provider 进程启动,注册;
- cameraserver 进程启动,注册,初始化;
- cameraserver 获取远端 provider(此时实例化 CameraProvider 并初始化)。
类和服务调用
CameraService的类继承关系
frameworks/av/camera/aidl/android/hardware/ICameraService.aidl
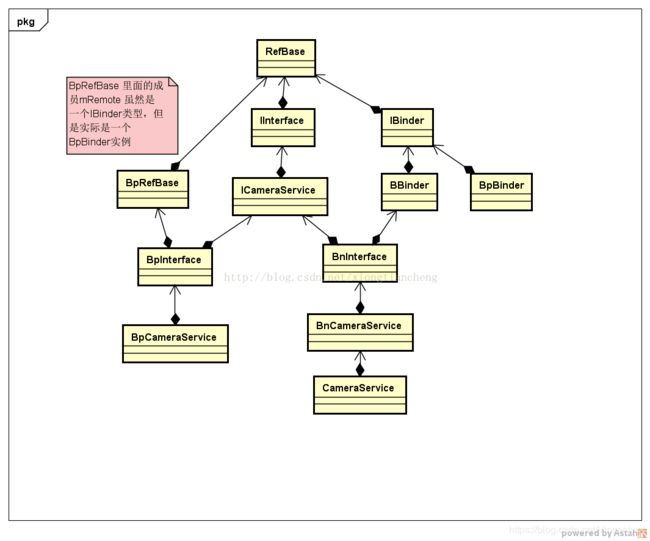
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/ICameraService.h./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/BnCameraService.hframeworks/av/services/camera/libcameraservice/CameraService.h
class CameraService :
public BinderService
public virtual ::android::hardware::BnCameraService,
public virtual IBinder::DeathRecipient,
public virtual CameraProviderManager::StatusListener
注册CameraService服务
alps/frameworks/av/camera/cameraserver/main_cameraserver.cpp
int main(int argc __unused, char** argv __unused){
sp
CameraService::instantiate();
}
获取CameraService服务
alps/frameworks/base/core/java/android/hardware/camera2/CameraManager.java
private CameraDevice openCameraDeviceUserAsync(String cameraId,
CameraDevice.StateCallback callback, Executor executor, final int uid)
ICameraDeviceUser cameraUser = null;
try {
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
}
}
private static final class CameraManagerGlobal extends ICameraServiceListener.Stub
public ICameraService getCameraService() {
IBinder cameraServiceBinder = ServiceManager.getService(CAMERA_SERVICE_BINDER_NAME);
ICameraService cameraService = ICameraService.Stub.asInterface(cameraServiceBinder);
mCameraService = cameraService;
return mCameraService;
}
}
通过以上注册服务和调用服务的流程,实现C++层服务cameraService 注册到ServiceManager,java层服务跨进程调用C++层服务。
其中继承BnCameraDeviceUser使其具有了跨进程通信的能力,所以实例化CameraDeviceClient时,这一系列类的构造函数都会被调用。
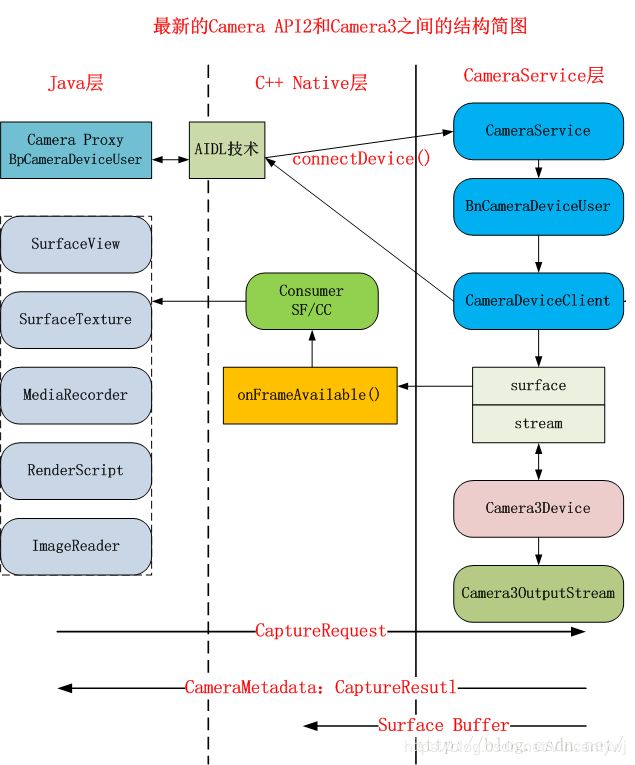
Cameraservice 在系统框架中的层次结构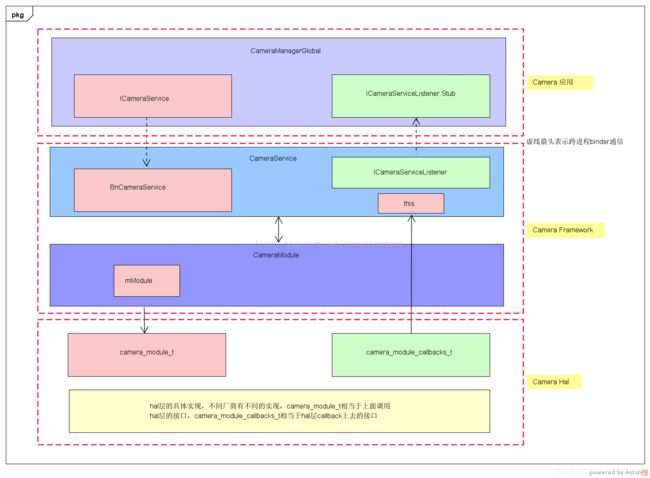
CameraDeviceUser的类继承关系
frameworks/av/camera/aidl/android/hardware/camera2/ICameraDeviceUser.aidl
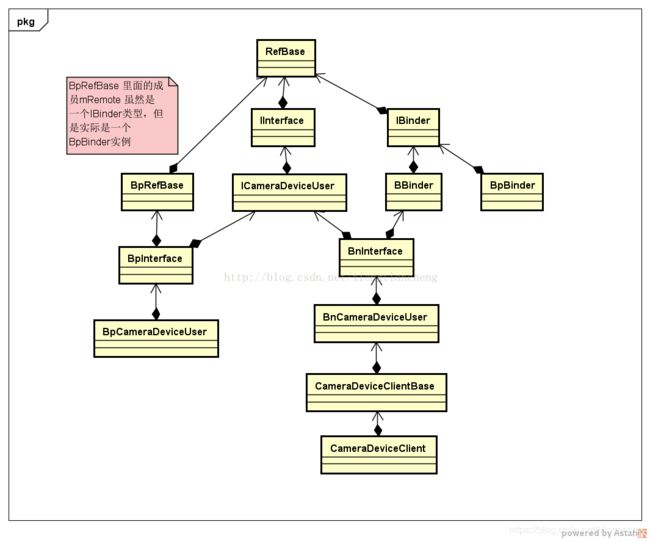
ICameraDeviceUser.aidl文件会自动生成:
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/camera2/ICameraDeviceUser.h
class ICameraDeviceUser : public ::android::IInterface {
virtual ::android::binder::Status createStream(const ::android::hardware::camera2::params::OutputConfiguration& outputConfiguration, int32_t* _aidl_return) = 0;
};
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/camera2/BnCameraDeviceUser.h
class BnCameraDeviceUser : public ::android::BnInterface<ICameraDeviceUser> {
::android::status_t onTransact(uint32_t _aidl_code, const ::android::Parcel& _aidl_data, ::android::Parcel* _aidl_reply, uint32_t _aidl_flags = 0) override;
};
frameworks/av/services/camera/libcameraservice/api2/CameraDeviceClient.h
struct CameraDeviceClientBase :
public CameraService::BasicClient,
public hardware::camera2::BnCameraDeviceUser
CameraDeviceClientBase::CameraDeviceClientBase() :
mRemoteCallback(remoteCallback) {
}
template
class Camera2ClientBase :
public TClientBase,
public CameraDeviceBase::NotificationListener
Camera2ClientBase
mInitialClientPid = clientPid;
mDevice = new Camera3Device(cameraId);
}
class CameraDeviceClient :
public Camera2ClientBase<CameraDeviceClientBase>,
public camera2::FrameProcessorBase::FilteredListener
客户端通过CameraService服务获取AIDL对象CameraDeviceClient
alps/frameworks/base/core/java/android/hardware/camera2/CameraManager.java
private CameraDevice openCameraDeviceUserAsync(String cameraId,
CameraDevice.StateCallback callback, Executor executor, final int uid)
ICameraDeviceUser cameraUser = null;
try {
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
cameraUser = cameraService.connectDevice(callbacks, cameraId,
mContext.getOpPackageName(), uid);
}
deviceImpl.setRemoteDevice(cameraUser);
}
跨进程调用,返回值ICameraDeviceUser
alps/frameworks/av/services/camera/libcameraservice/CameraService.cpp
Status CameraService::connectDevice(
const sp
sp
sp
ret = connectHelper
*device = client;
return ret;
}
template
Status CameraService::connectHelper(const sp
/*out*/sp
makeClient(this, cameraCb, clientPackageName, &tmp));
client = static_cast
}
CameraDeviceClient继承了BpCameraDeviceUser
Status CameraService::makeClient(const sp
/*out*/sp
sp
static_cast
*client = new CameraDeviceClient(cameraService, tmp, packageName, cameraId,
facing, clientPid, clientUid, servicePid);
}
使用AIDL对象CameraDeviceClient的方法
alps/frameworks/base/core/java/android/hardware/camera2/impl/ICameraDeviceUserWrapper.java
public class ICameraDeviceUserWrapper {
private final ICameraDeviceUser mRemoteDevice;
public ICameraDeviceUserWrapper(ICameraDeviceUser remoteDevice) {
mRemoteDevice = remoteDevice;
}
public SubmitInfo submitRequest(CaptureRequest request, boolean streaming){
return mRemoteDevice.submitRequest(request, streaming);//跨进程调用
}
}
CameraDeviceClient方法的具体实现
alps/frameworks/av/services/camera/libcameraservice/api2/CameraDeviceClient.cpp
binder::Status CameraDeviceClient::submitRequest(
const hardware::camera2::CaptureRequest& request,
bool streaming,
hardware::camera2::utils::SubmitInfo *submitInfo) {
std::vector
return submitRequestList(requestList, streaming, submitInfo);
}
通过以上流程,可以实现通过ServiceManager获得cameraService服务,之后通过cameraService服务获得AIDL对象CameraDeviceClient,之后通过CameraDeviceClient跨进程调用AIDL接口。
CameraDevice 在系统中的层次结构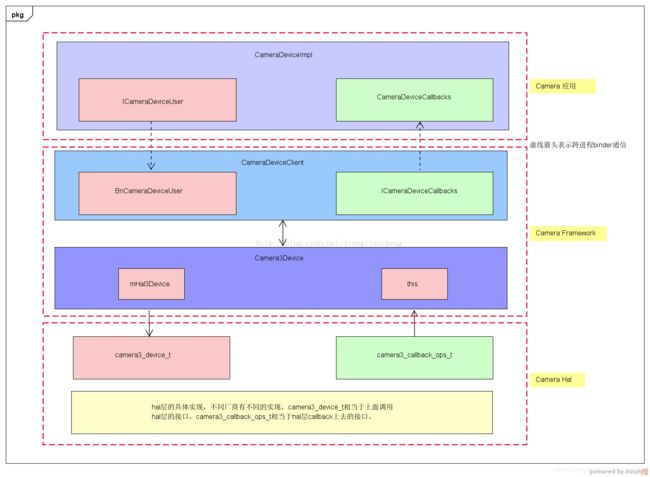
ICameraServiceProxy.aidl
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/ICameraServiceProxy.h
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/BnCameraServiceProxy.h
AIDL的服务实现
alps/frameworks/base/services/core/java/com/android/server/camera/CameraServiceProxy.java
public static final String CAMERA_SERVICE_PROXY_BINDER_NAME = "media.camera.proxy";
public class CameraServiceProxy extends SystemService
implements Handler.Callback, IBinder.DeathRecipient {
frameworks/base/services/core/java/com/android/server/camera/CameraServiceProxy.java
private final ICameraServiceProxy.Stub mCameraServiceProxy = new ICameraServiceProxy.Stub() {
public void pingForUserUpdate() {
notifySwitchWithRetries(30);
}
};
public void onStart() {
publishBinderService(CAMERA_SERVICE_PROXY_BINDER_NAME, mCameraServiceProxy);
publishLocalService(CameraServiceProxy.class, this);
CameraStatsJobService.schedule(mContext);
}
}
启动服务
public final class SystemServer {
private void startOtherServices() {
if (!disableCameraService) {
traceBeginAndSlog("StartCameraServiceProxy");
mSystemServiceManager.startService(CameraServiceProxy.class);
}
}
}
AIDL服务的使用
alps/frameworks/av/services/camera/libcameraservice/CameraService.cpp
sp
sp
sp
sp
proxyBinder = interface_cast
return proxyBinder;
}
void CameraService::pingCameraServiceProxy() {
sp
proxyBinder->pingForUserUpdate();//跨进程调用
}
通过以上注册服务和调用服务的流程,实现java服务注册到ServiceManager,C++层服务跨进程调用java层服务。
ICameraDeviceCallbacks.aidl
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/camera2/ICameraDeviceCallbacks.h
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/camera2/BnCameraDeviceCallbacks.h
frameworks/av/camera/ndk/impl/ACameraDevice.h
class ServiceCallback : public hardware::camera2::BnCameraDeviceCallbacks
ICameraServiceListener.aidl
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/ICameraServiceListener.h
./out/soong/.intermediates/frameworks/av/camera/libcamera_client/android_arm_armv7-a-neon_core_shared_platform/gen/aidl/android/hardware/BnCameraServiceListener.h
frameworks/base/core/java/android/hardware/camera2/CameraManager.java
static final String CAMERA_SERVICE_BINDER_NAME = "media.camera";
private static final class CameraManagerGlobal extends ICameraServiceListener.Stub
implements IBinder.DeathRecipient {
private void connectCameraServiceLocked() {
IBinder cameraServiceBinder = ServiceManager.getService(CAMERA_SERVICE_BINDER_NAME);
ICameraService cameraService = ICameraService.Stub.asInterface(cameraServiceBinder);
try {
CameraStatus[] cameraStatuses = cameraService.addListener(this);//注册监听对象
mCameraService = cameraService;
}
}
}
alps/frameworks/av/services/camera/libcameraservice/CameraService.cpp
跨进程调用,参数listener,返回值cameraStatuses
Status CameraService::addListener(const sp
std::vector
for (size_t i = 0; i < mTorchStatusMap.size(); i++ ) {
String16 id = String16(mTorchStatusMap.keyAt(i).string());
listener->onTorchStatusChanged(mapToInterface(mTorchStatusMap.valueAt(i)), id);//跨进程回调监听函数
}
}
通过以上注册服务和调用服务的流程,实现将java服务作为监听对象注册到C++层服务,C++层服务跨进程回调java层服务。
Java层要想与C++层的CameraService层进行通信,都是通过Java层的IPC Binder进制进行的,主要包括ICameraService.aidl以及ICameraDeviceUser.aidl两个接口来实现,其会在Java层维护一个CameraDeviceImpl即Camera设备的代理。