28335的CAN总线学习笔记
在调试28335的CAN的发送时出现的问题:
1、接口用错导致一直失败;
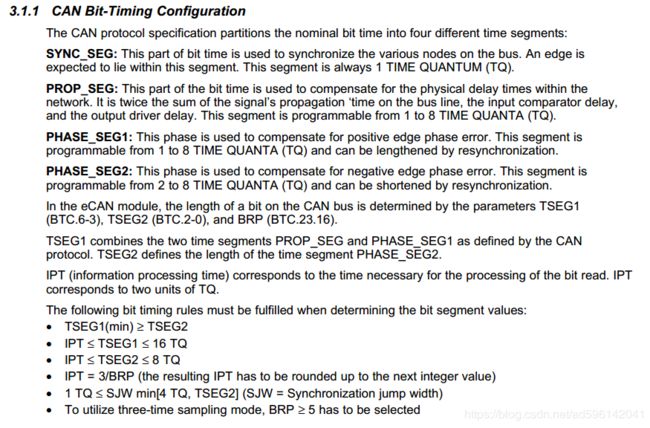
2、注意28335的CAN总线波特率计算,如下所述:
ECanaShadow.CANBTC.bit.BRPREG = 9;
ECanaShadow.CANBTC.bit.TSEG2REG = 2;
ECanaShadow.CANBTC.bit.TSEG1REG = 10;
以上代码是配置28335的CAN总线模块波特率,最后的波特率为:
![]()
按照上面的参数计算最后的波特率为500k;
同时还需要注意28335的CAN总线中比较特殊的说明,如下所述:
1、是关于波特率配置的描述:
2、关于CAN网络的说明:
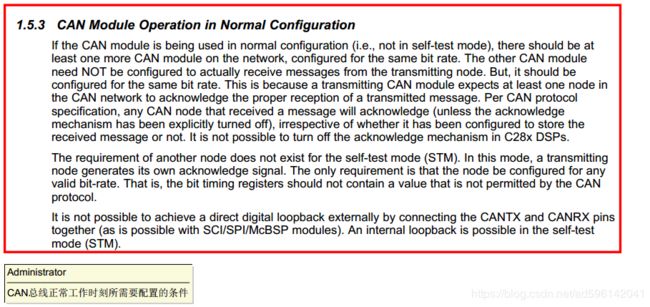
必须保证在网络中有一个设备和当前节点配置为同样的波特率,但是不一定要设置为接收模式;
附:最后的配置程序:
void InitECana(void) // 初始化CAN总线模块
{
/* Create a shadow register structure for the CAN control registers. This is
needed, since only 32-bit access is allowed to these registers. 16-bit access
to these registers could potentially corrupt the register contents or return
false data. This is especially true while writing to/reading from a bit
(or group of bits) among bits 16 - 31 */
struct ECAN_REGS ECanaShadow;
EALLOW; // EALLOW enables access to protected bits
/* Configure eCAN RX and TX pins for CAN operation using eCAN regs*/
ECanaShadow.CANTIOC.all = ECanaRegs.CANTIOC.all;
ECanaShadow.CANTIOC.bit.TXFUNC = 1;
ECanaRegs.CANTIOC.all = ECanaShadow.CANTIOC.all;
ECanaShadow.CANRIOC.all = ECanaRegs.CANRIOC.all;
ECanaShadow.CANRIOC.bit.RXFUNC = 1;
ECanaRegs.CANRIOC.all = ECanaShadow.CANRIOC.all;
/* Configure eCAN for HECC mode - (reqd to access mailboxes 16 thru 31) */
// HECC mode also enables time-stamping feature
ECanaShadow.CANMC.all = ECanaRegs.CANMC.all;
ECanaShadow.CANMC.bit.SCB = 1;
ECanaRegs.CANMC.all = ECanaShadow.CANMC.all;
/* Initialize all bits of 'Master Control Field' to zero */
// Some bits of MSGCTRL register come up in an unknown state. For proper operation,
// all bits (including reserved bits) of MSGCTRL must be initialized to zero
ECanaMboxes.MBOX0.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX1.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX2.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX3.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX4.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX5.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX6.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX7.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX8.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX9.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX10.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX11.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX12.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX13.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX14.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX15.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX16.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX17.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX18.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX19.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX20.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX21.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX22.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX23.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX24.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX25.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX26.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX27.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX28.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX29.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX30.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX31.MSGCTRL.all = 0x00000000;
// TAn, RMPn, GIFn bits are all zero upon reset and are cleared again
// as a matter of precaution.
ECanaRegs.CANTA.all = 0xFFFFFFFF; /* Clear all TAn bits */
ECanaRegs.CANRMP.all = 0xFFFFFFFF; /* Clear all RMPn bits */
ECanaRegs.CANGIF0.all = 0xFFFFFFFF; /* Clear all interrupt flag bits */
ECanaRegs.CANGIF1.all = 0xFFFFFFFF;
/* Configure bit timing parameters for eCANA*/
ECanaShadow.CANMC.all = ECanaRegs.CANMC.all;
ECanaShadow.CANMC.bit.CCR = 1 ; // Set CCR = 1
ECanaRegs.CANMC.all = ECanaShadow.CANMC.all;
ECanaShadow.CANES.all = ECanaRegs.CANES.all;
do
{
ECanaShadow.CANES.all = ECanaRegs.CANES.all;
} while(ECanaShadow.CANES.bit.CCE != 1 ); // Wait for CCE bit to be set..
ECanaShadow.CANBTC.all = 0;
#if (CPU_FRQ_150MHZ)
//初始化通信波特率
/*
具体的波特率计算:
波特率=系统时钟/(2*(BRPREG+TSEG2REG+TSEG1REG+3)),同时需要确保TSEG1REG > TSEG2REG
*/
ECanaShadow.CANBTC.bit.BRPREG = 9;
ECanaShadow.CANBTC.bit.TSEG2REG = 2;
ECanaShadow.CANBTC.bit.TSEG1REG = 10;
#endif
ECanaShadow.CANBTC.bit.SAM = 1;
ECanaRegs.CANBTC.all = ECanaShadow.CANBTC.all;
ECanaShadow.CANMC.all = ECanaRegs.CANMC.all;
ECanaShadow.CANMC.bit.CCR = 0 ; // Set CCR = 0
ECanaRegs.CANMC.all = ECanaShadow.CANMC.all;
ECanaShadow.CANES.all = ECanaRegs.CANES.all;
do
{
ECanaShadow.CANES.all = ECanaRegs.CANES.all;
} while(ECanaShadow.CANES.bit.CCE != 0 ); // Wait for CCE bit to be cleared..
/* Disable all Mailboxes */
ECanaRegs.CANME.all = 0; // Required before writing the MSGIDs
EDIS;
}
void InitECanGpio(void)
{
InitECanaGpio();
#if (DSP28_ECANB)
InitECanbGpio();
#endif // if DSP28_ECANB
}
void InitECanaGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected CAN pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO18 = 0; // Enable pull-up for GPIO18 (CANRXA)
GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; // Enable pull-up for GPIO19 (CANTXA)
/* Set qualification for selected CAN pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
GpioCtrlRegs.GPAQSEL2.bit.GPIO18 = 3; // Asynch qual for GPIO18 (CANRXA)
/* Configure eCAN-A pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAN functional pins.
GpioCtrlRegs.GPAMUX2.bit.GPIO18 = 3; // Configure GPIO18 for CANRXA operation
GpioCtrlRegs.GPAMUX2.bit.GPIO19 = 3; // Configure GPIO19 for CANTXA operation
EDIS;
}
#if (DSP28_ECANB)
void InitECanbGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected CAN pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0; // Enable pull-up for GPIO12 (CANTXB)
GpioCtrlRegs.GPAPUD.bit.GPIO13 = 0; // Enable pull-up for GPIO13 (CANRXB)
/* Set qualification for selected CAN pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO13 = 3; // Asynch qual for GPIO13 (CANRXB)
/* Configure eCAN-B pins using GPIO regs*/
GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 2; // Configure GPIO12 for CANTXB operation
GpioCtrlRegs.GPAMUX1.bit.GPIO13 = 2; // Configure GPIO13 for CANRXB operation
EDIS;
}
#endif // if DSP28_ECANB具关于CAN总线中的收发问题:
1、发送:
.具体描述参见上图,配置程序如下所示:
//发送一帧数据
/*
CAN总线发送数据结构体
typedef struct
{
unsigned short int StdId; //标准帧ID,值为0x000到0x7FFF;
unsigned long int ExtId; //扩展帧ID,值为0到0x1FFFFFFF
unsigned char SAE_J1939_Flag;//表示是否使用SAE J1939协议
SAE_ID SAE_J1939_ID;
unsigned char IDE; //帧类型,可为:CAN_ID_STD(标准帧),CAN_ID_EXT(扩展帧)
unsigned char DLC; //数据长度,可为0到8;
unsigned char MBox_num;//邮箱编号,可为0到31;
unsigned short int Tx_timeout_cnt;
CAN_MSG_DATA CAN_Tx_msg_data; /*!< 帧消息内容,共8字节 */
} CanTxMsg;
*/
void CAN_Send_Msg(CanTxMsg *can_tx_msg)//发送一帧数据
{
Uint16 time_cnt;
Uint32 mbox_enable_temp = 0x0000;
Uint32 mbox_disable_temp = 0x0000;
Uint32 mbox_dir_temp = 0x0000;
mbox_enable_temp = 1<<(can_tx_msg->MBox_num);
mbox_disable_temp = ~(1<<(can_tx_msg->MBox_num));
mbox_dir_temp = ~(1<<(can_tx_msg->MBox_num));
struct ECAN_REGS ECanaShadow;
volatile struct MBOX *Mailbox;
Mailbox = &ECanaMboxes.MBOX0+can_tx_msg->MBox_num;
ECanaShadow.CANME.all = ECanaRegs.CANME.all;
ECanaShadow.CANME.all &= mbox_disable_temp;
ECanaRegs.CANME.all = ECanaShadow.CANME.all;
if(can_tx_msg->IDE == CAN_ID_STD)
{
Mailbox->MSGID.all = can_tx_msg->StdId; //standard identifier
Mailbox->MSGID.bit.IDE = can_tx_msg->IDE;
}
else if(can_tx_msg->IDE == CAN_ID_EXT)
{
if(can_tx_msg->SAE_J1939_Flag == 0)
{
Mailbox->MSGID.all = can_tx_msg->ExtId; //extended identifier.
Mailbox->MSGID.bit.IDE = can_tx_msg->IDE;
}
else
{
Mailbox->MSGID.all = can_tx_msg->SAE_J1939_ID.id; //extended identifier.
Mailbox->MSGID.bit.IDE = can_tx_msg->IDE;
}
}
ECanaShadow.CANMD.all = ECanaRegs.CANMD.all;
ECanaShadow.CANMD.all &=mbox_dir_temp;//设置邮箱工作方向,0表示邮箱工作于发送,1表示工作于接收
ECanaRegs.CANMD.all = ECanaShadow.CANMD.all;
ECanaShadow.CANME.all = ECanaRegs.CANME.all;
ECanaShadow.CANME.all |= mbox_enable_temp;//使能邮箱
ECanaRegs.CANME.all = ECanaShadow.CANME.all;
Mailbox->MSGCTRL.bit.DLC = can_tx_msg->DLC;//数据长度
Mailbox->MDL.byte.BYTE0 = can_tx_msg->CAN_Tx_msg_data.msg_Byte.byte0;
Mailbox->MDL.byte.BYTE1 = can_tx_msg->CAN_Tx_msg_data.msg_Byte.byte1;
Mailbox->MDL.byte.BYTE2 = can_tx_msg->CAN_Tx_msg_data.msg_Byte.byte2;
Mailbox->MDL.byte.BYTE3 = can_tx_msg->CAN_Tx_msg_data.msg_Byte.byte3;
Mailbox->MDH.byte.BYTE4 = can_tx_msg->CAN_Tx_msg_data.msg_Byte.byte4;
Mailbox->MDH.byte.BYTE5 = can_tx_msg->CAN_Tx_msg_data.msg_Byte.byte5;
Mailbox->MDH.byte.BYTE6 = can_tx_msg->CAN_Tx_msg_data.msg_Byte.byte6;
Mailbox->MDH.byte.BYTE7 = can_tx_msg->CAN_Tx_msg_data.msg_Byte.byte7;
ECanaShadow.CANTRS.all = 0;
ECanaShadow.CANTRS.all |= mbox_enable_temp; // Set TRS for mailbox under test
ECanaRegs.CANTRS.all = ECanaShadow.CANTRS.all;
do
{
ECanaShadow.CANTA.all = ECanaRegs.CANTA.all;
time_cnt++;
} while(((ECanaShadow.CANTA.all&mbox_enable_temp) == 0 )&&(time_cnt<100)); // Wait for TA5 bit to be set..
ECanaShadow.CANTA.all = 0;
ECanaShadow.CANTA.all = mbox_enable_temp; // Clear TA5
ECanaRegs.CANTA.all = ECanaShadow.CANTA.all;
}接收相关配置:(数据接受通常会采用中断来接收数据),具体配置程序如下,包括中断的相关配置;
void CAN_Rx_Config(void)//接收配置函数,程序中相关备注
{
struct ECAN_REGS ECanaShadow;
ECanaShadow.CANME.all = ECanaRegs.CANME.all;
ECanaShadow.CANME.bit.ME1 = 0;//不使能邮箱1
ECanaShadow.CANME.bit.ME31 = 0;//不使能邮箱31
ECanaRegs.CANME.all = ECanaShadow.CANME.all;
/*----------以下代码是配置接受邮箱的相关代码------------*/
//邮箱1相关配置
ECanaMboxes.MBOX1.MSGCTRL.bit.DLC = 8;//配置数据长度,应该是没意义的;
ECanaMboxes.MBOX1.MSGID.all = 0x07909ADC;//设置接收消息的有效ID
ECanaMboxes.MBOX1.MSGID.bit.AME =1;//屏蔽使能位,如果需要使用屏蔽,必须将该位置1
ECanaMboxes.MBOX1.MSGID.bit.IDE = CAN_ID_EXT;
/*
LAMn[28:0]
这些位启用一个进入消息的任意标识符位的屏蔽。
1 针对接受到的标识符的相应位, 接受一个 0 或 1( 无关) 。
0 接收到的标识符位值必须与 MSGID 寄存器的相应标识符位相匹配。
*/
ECanaLAMRegs.LAM1.all = 0x000000F;//
/*
LAMI 本地接受屏蔽标识符扩展位
1 可以接收标准和扩展帧。 在扩展帧的情况下, 标识符的所有 29 位被存储在邮箱中, 本地接受屏 蔽寄存器的所有 29 位被过滤器使用。 在一个标准帧的情况下, 只有标识符的头 11 个位( 28 至 18 位)
和本地接受屏蔽被使用。
0 存储在邮箱中的标识符扩展位决定了哪些消息应该被接收到
*/
ECanaLAMRegs.LAM1.bit.LAMI = 1;
//邮箱31相关配置
ECanaMboxes.MBOX31.MSGCTRL.bit.DLC = 8;//配置数据长度,应该是没意义的;
ECanaMboxes.MBOX31.MSGID.all = 0x07909ABC;//设置接收消息的有效ID
ECanaMboxes.MBOX31.MSGID.bit.AME =1;//屏蔽使能位,
ECanaMboxes.MBOX31.MSGID.bit.IDE = CAN_ID_EXT;
/*
LAM[28:0]
这些位启用一个进入消息的任意标识符位的屏蔽。
1 针对接受到的标识符的相应位, 接受一个 0 或 1( 无关) 。
0 接收到的标识符位值必须与 MSGID 寄存器的相应标识符位相匹配。
*/
ECanaLAMRegs.LAM31.all = 0x000000F;//
/*
LAMI 本地接受屏蔽标识符扩展位
1 可以接收标准和扩展帧。 在扩展帧的情况下, 标识符的所有 29 位被存储在邮箱中,本地接受屏蔽寄
存器的所有 29 位被过滤器使用。 在一个标准帧的情况下, 只有标识符的头 11 个位( 28 至 18 位)
和本地接受屏蔽被使用。
0 存储在邮箱中的标识符扩展位决定了哪些消息应该被接收到
*/
ECanaLAMRegs.LAM31.bit.LAMI = 1;
ECanaRegs.CANRMP.all = 0xFFFFFFFF;
ECanaShadow.CANMD.all = ECanaRegs.CANMD.all;
ECanaShadow.CANMD.bit.MD1 = 1;
ECanaShadow.CANMD.bit.MD31 = 1;
ECanaRegs.CANMD.all = ECanaShadow.CANMD.all;
ECanaShadow.CANME.all = ECanaRegs.CANME.all;
ECanaShadow.CANME.bit.ME1 = 1;//使能邮箱1
ECanaShadow.CANME.bit.ME31 = 1;//使能邮箱1
ECanaRegs.CANME.all = ECanaShadow.CANME.all;
}
void CAN_Rx_IT_Concig(void)//邮箱中断相关配置
{
EALLOW;
ECanaRegs.CANMIM.bit.MIM1 = 1;//使能中断邮箱1的中断;
ECanaRegs.CANMIL.bit.MIL1 = 1;//将中断1连接至中断1;
ECanaRegs.CANMIM.bit.MIM31 = 1;//使能中断邮箱31的中断;
ECanaRegs.CANMIL.bit.MIL31 = 1;//将中断1连接至中断1;
ECanaRegs.CANGIM.bit.I1EN = 1;//使能中断1;
EDIS;
}
//具体的中断函数,在清除GMIF1标志位时,不能通过向GMIF1写1来清除,只能通过向RMPn来清除该标志位
/*
CAN总线接收数据的结构体
typedef struct
{
unsigned short int StdId; //标准帧ID,值为0x000到0x7FFF;
unsigned long int ExtId; //扩展帧ID,值为0到0x1FFFFFFF
unsigned char SAE_J1939_Flag;//表示是否使用SAE J1939协议
SAE_ID SAE_J1939_ID;
unsigned char IDE; //帧类型,可为:CAN_ID_STD(标准帧),CAN_ID_EXT(扩展帧)
unsigned char DLC; //数据长度,可为0到8
unsigned char MBox_num;//发送所用邮箱编号
unsigned short int Rx_timeout_cnt;
CAN_MSG_DATA CAN_Rx_msg_data; /*!< 帧消息内容,共8字节 */
} CanRxMsg;
*/
__interrupt void Ecana_isr1(void)
{
if(ECanaRegs.CANGIF1.bit.GMIF1 == 1)
{
if(ECanaRegs.CANRMP.bit.RMP1 == 1)
{
//读取该位是知道当前哪一个邮箱收到数据,
can_rx_msg.MBox_num = ECanaRegs.CANGIF1.bit.MIV1;
can_rx_msg.DLC = ECanaMboxes.MBOX1.MSGCTRL.bit.DLC;
can_rx_msg.IDE = ECanaMboxes.MBOX1.MSGID.bit.IDE;
if(can_rx_msg.IDE == CAN_ID_EXT)
{
can_rx_msg.ExtId = ECanaMboxes.MBOX1.MSGID.all&0x1FFFFFFF;
can_rx_msg.SAE_J1939_ID.id = can_rx_msg.ExtId;
}
else if(can_rx_msg.IDE == CAN_ID_STD)
{
can_rx_msg.StdId = ECanaMboxes.MBOX1.MSGID.bit.STDMSGID;
}
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte0 = ECanaMboxes.MBOX1.MDL.byte.BYTE0;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte1 = ECanaMboxes.MBOX1.MDL.byte.BYTE1;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte2 = ECanaMboxes.MBOX1.MDL.byte.BYTE2;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte3 = ECanaMboxes.MBOX1.MDL.byte.BYTE3;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte4 = ECanaMboxes.MBOX1.MDH.byte.BYTE4;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte5 = ECanaMboxes.MBOX1.MDH.byte.BYTE5;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte6 = ECanaMboxes.MBOX1.MDH.byte.BYTE6;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte7 = ECanaMboxes.MBOX1.MDH.byte.BYTE7;
ECanaRegs.CANRMP.bit.RMP1 = 1;
}
else if(ECanaRegs.CANRMP.bit.RMP31 == 1)
{
can_rx_msg.MBox_num = ECanaRegs.CANGIF1.bit.MIV1;
can_rx_msg.DLC = ECanaMboxes.MBOX31.MSGCTRL.bit.DLC;
can_rx_msg.IDE = ECanaMboxes.MBOX31.MSGID.bit.IDE;
if(can_rx_msg.IDE == CAN_ID_EXT)
{
can_rx_msg.ExtId = ECanaMboxes.MBOX31.MSGID.all&0x1FFFFFFF;
can_rx_msg.SAE_J1939_ID.id = can_rx_msg.ExtId;
}
else if(can_rx_msg.IDE == CAN_ID_STD)
{
can_rx_msg.StdId = ECanaMboxes.MBOX31.MSGID.bit.STDMSGID;
}
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte0 = ECanaMboxes.MBOX31.MDL.byte.BYTE0;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte1 = ECanaMboxes.MBOX31.MDL.byte.BYTE1;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte2 = ECanaMboxes.MBOX31.MDL.byte.BYTE2;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte3 = ECanaMboxes.MBOX31.MDL.byte.BYTE3;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte4 = ECanaMboxes.MBOX31.MDH.byte.BYTE4;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte5 = ECanaMboxes.MBOX31.MDH.byte.BYTE5;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte6 = ECanaMboxes.MBOX31.MDH.byte.BYTE6;
can_rx_msg.CAN_Rx_msg_data.msg_Byte.byte7 = ECanaMboxes.MBOX31.MDH.byte.BYTE7;
ECanaRegs.CANRMP.bit.RMP31 = 1;
}
}
PieCtrlRegs.PIEACK.bit.ACK9 = 1;
}