王家林人工智能AI 第七节课:四种性能优化Matrix编写AI框架实战(Gradient Descent的陷阱、及几种常见的性能优化方式实战)老师微信13928463918
王家林人工智能AI 第七节课:四种性能优化Matrix编写AI框架实战(Gradient Descent的陷阱、及几种常见的性能优化方式实战)老师微信13928463918







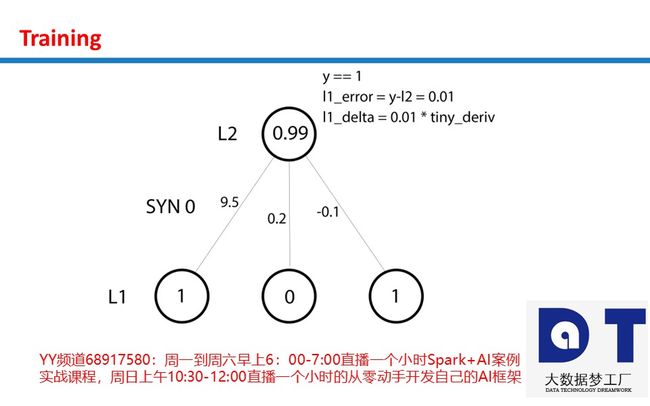




在上一节课从零起步(无需数学和Python基础)编码实现AI框架之第六节课:使用Matrix编写AI框架实战及测试(https://blog.csdn.net/duan_zhihua/article/details/80041548)中,我们实现了一个简单的反向传播的神经网络。
(本文根据家林大神课程及相关网络资料整理。)
先看一个代码:
import numpy as np
X = np.array([ [0,0,1],[0,1,1],[1,0,1],[1,1,1] ])
y = np.array([[0,1,1,0]]).T
alpha,hidden_dim = (0.5,4)
synapse_0 = 2*np.random.random((3,hidden_dim)) - 1
synapse_1 = 2*np.random.random((hidden_dim,1)) - 1
for j in xrange(60000):
layer_1 = 1/(1+np.exp(-(np.dot(X,synapse_0))))
layer_2 = 1/(1+np.exp(-(np.dot(layer_1,synapse_1))))
layer_2_delta = (layer_2 - y)*(layer_2*(1-layer_2))
layer_1_delta = layer_2_delta.dot(synapse_1.T) * (layer_1 * (1-layer_1))
synapse_1 -= (alpha * layer_1.T.dot(layer_2_delta))
synapse_0 -= (alpha * X.T.dot(layer_1_delta))一、优化
反向传播让我们可以测量网络中的每项权重对总误差的贡献,我们可以使用很多不同的非线性优化方法对反向传播进行优化:
-
-
-
- Annealing(退火)
- Stochastic Gradient Descent(随机梯度下降)
- AW-SGB
- Momentum (SGD)(动量)
- Nesterov Momentum (SGD)(Nesterov动量)
- AdaGrad
- AdaDelta
- ADAM
- BFGS
- LBFGS
-
-
可视化优化方法的差异
ConvNet.js(http://cs.stanford.edu/people/karpathy/convnetjs/demo/trainers.html)
RobertsDionne(http://www.robertsdionne.com/bouncingball/)
这些优化算法在不同的场景下表现良好,在某些场景下,我们可以同时使用多个优化算法。本节课讨论梯度下降。梯度下降是最简单、应用最广泛的神经网络优化算法。
二、梯度下降
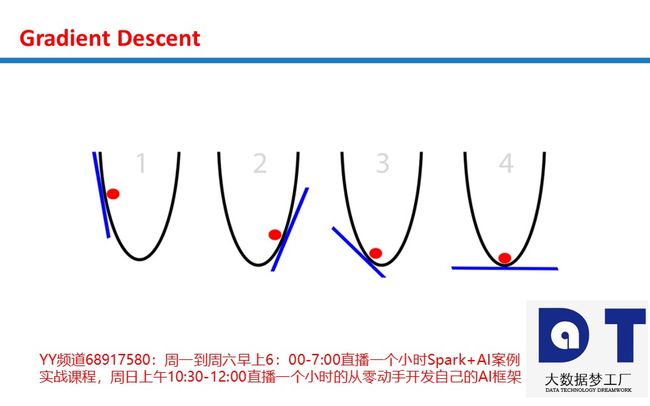
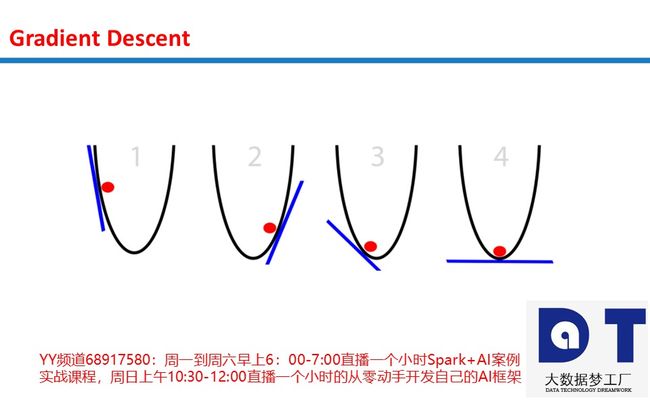
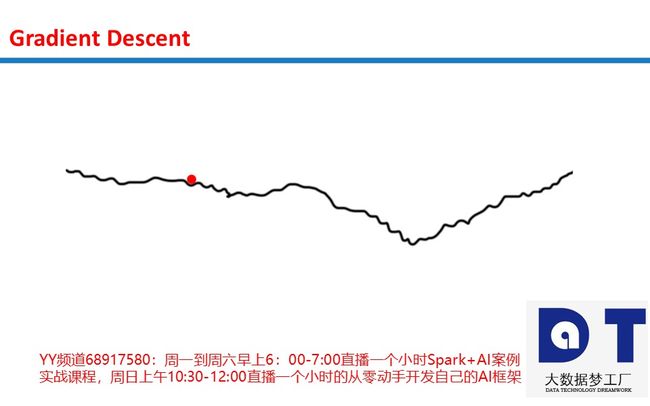
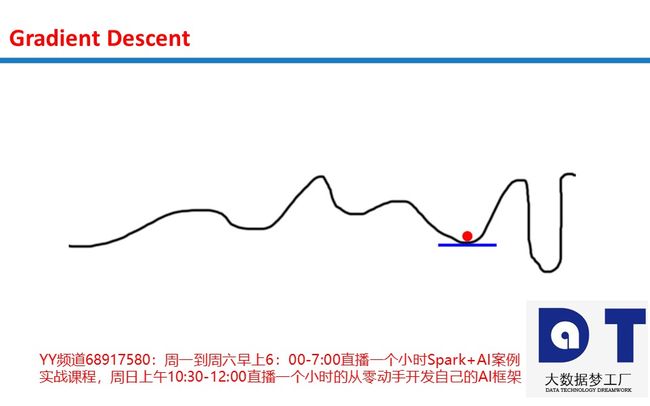
想象一个圆筐中的红球试图找到筐底,这就是优化(optimization)。在这个例子中,球优化它的位置以寻找筐的最低点。我们可以把这看成一个游戏:球有两个选项,向左,或是向右。目标:使自己的位置尽可能地低。

那么,球是基于什么信息调整自己的位置来找到最低点的呢?根据斜率(slope)来确定,即下图中的蓝线。注意,当斜率(slope)为负时(左高右低,从左自右往下),球应该向右移动。而当斜率(slope)为正时(左低右高,从右自左往下),球应该向左。根据这些信息足以让球在几次迭代之后找到筐底。这是优化的一个子领域,称为梯度优化(gradient optimization)。
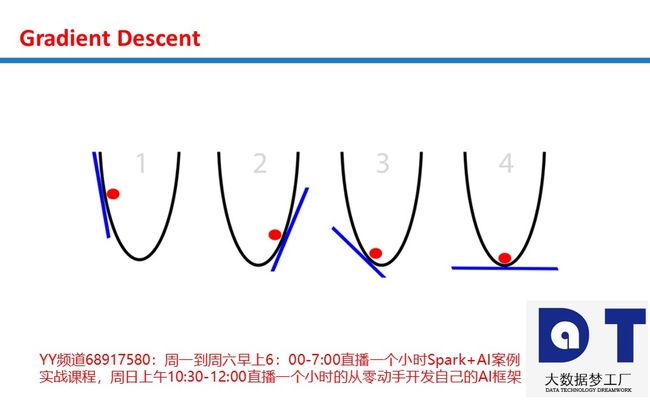
过于简化的梯度下降
- 在当前位置计算斜率(slope)
- 如果斜率(slope)为负,向右移动
- 如果斜率(slope)为正,向左移动
- (重复这一过程,直到梯度为零)
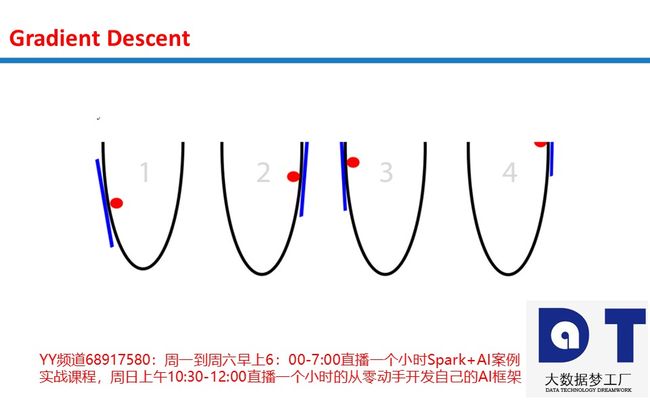
有一个问题,每次球需要移动多长的距离?看看球筐,斜率(slope)越陡,球离底部的距离越远。这很有用!让我们利用这一新信息改进我们的算法。同时,我们假设筐在一个(x,y)平面上。因此,球的位置为x,增加x意味着向右移动,减少x意味着向左移动。
朴素梯度下降
- 计算当前位置x的斜率(slope)
- 从x减去斜率(x = x - 斜率)
- (重复这一过程,直到斜率为零)
可以在脑海中想象这一过程。对我们的算法而言,这是一个可观的改善。对较大的正斜率,我们向左移动较长的距离。对很小的正斜率,我们向左移动很短的距离。随着球越来越接近底部,球每次移动的距离越来越短,直到斜率为零,球停在这一点上。这个停止的点称为收敛(convergence)。
三、可能的问题
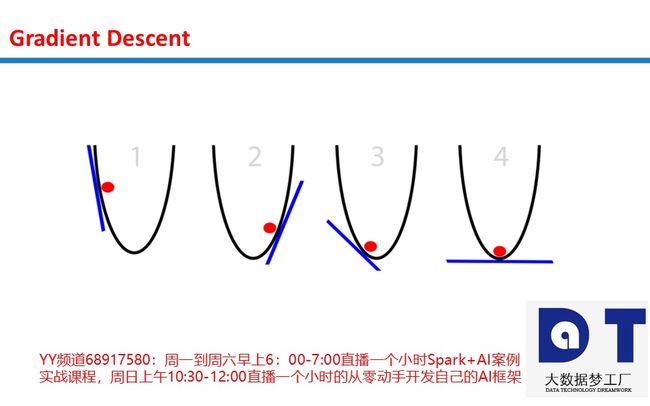
问题一:斜率(slope)过大,多大算过大? 步幅取决于斜率(slope)的陡峭程度。有时斜率(slope)过陡,我们的移动过头了很多。稍微有点移动过头没问题,但有时我们过头到了比开始的时候离底部更远的程度!
让这个坑极具破坏性的一点是过头到了这种程度,意味着我们将落在相反反向上更陡峭的斜坡上。这将使我们再次移动过头,并且过头得更厉害。这一移动过头的恶性循环称为发散(divergence)。
解决方案一:让斜率小一点
每个神经网络都大量使用这一技巧。如果我们的梯度过大,我们让它小一点!我们给梯度(所有梯度)乘上一个0到1之间的系数(比如0.01)。这个小数通常是一个称为alpha的单精度浮点数。如此做了之后,就不会过头了,网络也可以收敛了。
梯度下降改进版
- alpha = 0.1 (或0到1之间的某个数)
- 计算当前位置x的斜率
- x = x - alpha * 斜率
- (重复这一过程,直到斜率为零)
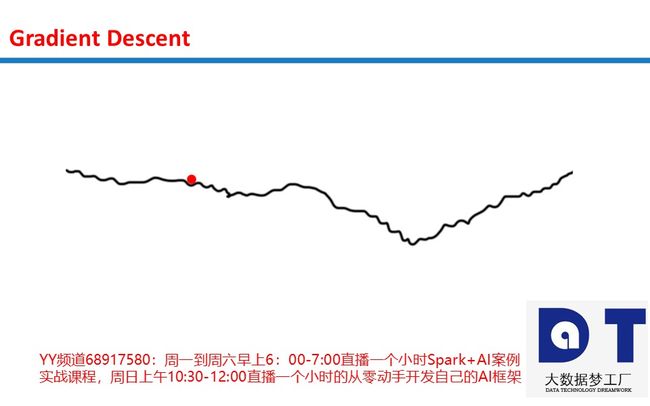
问题二:局部极小值
有时筐的形状很有趣,沿着坡度无法让你到达绝对最低点。
这是目前为止梯度下降最大的坑。有无数尝试绕过这个坑的办法。一般而言,它们多多少少都依靠某种随机搜索方法在筐的不同部分尝试。
解决方案二:多个随机开始状态
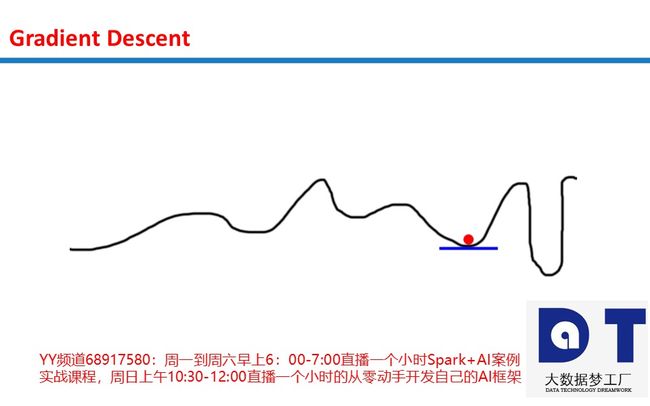
有无数通过随机性绕过这个坑的方法。这提出了一个问题,如果我们需要通过随机性来查找全局最小值,为什么我们一开始要优化?为什么不直接随机地尝试呢?下图给出了答案。
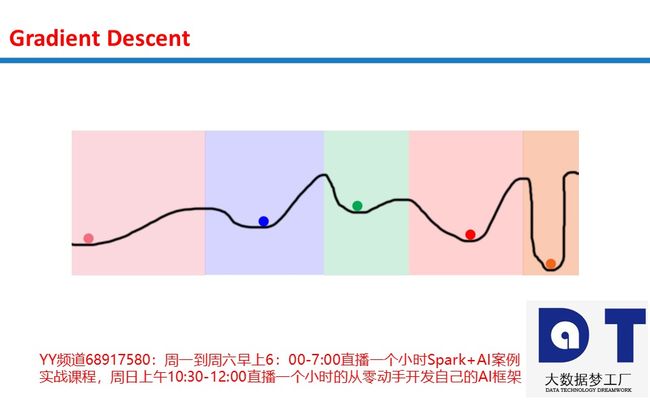
想象一下,我们在上图中随机放置100个球,然后开始优化。最终所有的球都会落在5个位置上(上图5个颜色不同的球所在的位置)。着色的区域表示每个局部极小值的领域。例如,蓝色领域内随机放置的球会收敛至蓝色极小值。这意味着,我们只需随机搜索5个空间,就可以搜索整个空间!这比纯随机搜索要好太多了,纯随机搜索需要尝试所有空间(取决于粒度,这可能意味着几百万个空间)。
在神经网络中: 神经网络做到这一点的其中一个方式是使用很大的隐藏层。层中的每个隐藏节点从不同的随机状态开始。这让每个隐藏节点收敛到网络的不同模式。参数化这一尺寸让网络使用者可以选择尝试单个神经网络中数千(甚至是数百亿)个不同的局部极小值。
旁注一: 这正是神经网络如此强大的原因! 神经网络具备搜索比实际计算多得多的空间的能力!(理论上)我们可以仅仅使用5个球和不多的迭代搜索上图中的整条黑线。以暴力破解的方式搜索同一空间需要多很多数量级的计算。
旁注二: 仔细观察的人可能会问:“好,为什么我们让这么多节点收敛至同一点?这不是在浪费算力吗?”这是一个很好的问题。当前最先进的避免隐藏节点给出相同答案(通过搜索同一个空间)的方法是Dropout和Drop-Connect 。
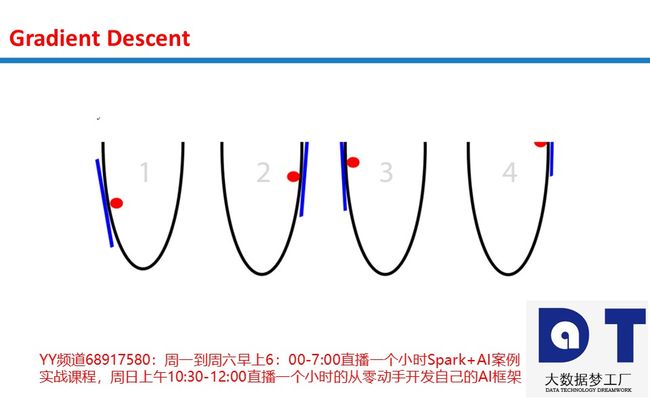
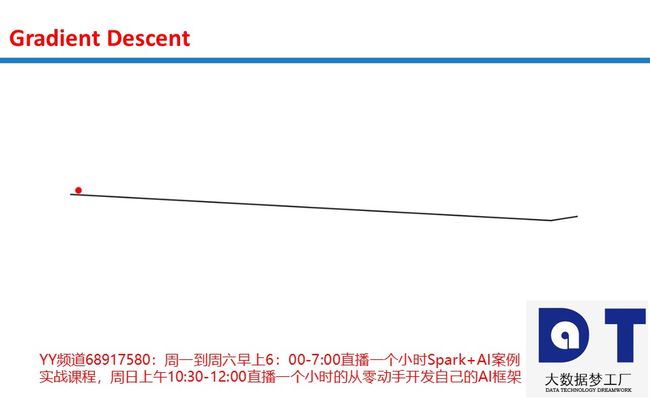
问题三:坡度过小
神经网络有时会落入坡度过小的坑。答案同样是显然的。考虑下面的图形。
我们的小红球陷入了困境!如果我们的alpha太小,就可能出现这种情况。球落入了附近的局部极小值而忽略了整个图形。它不具备打破日复一日的乏味生活的精力(umph)。
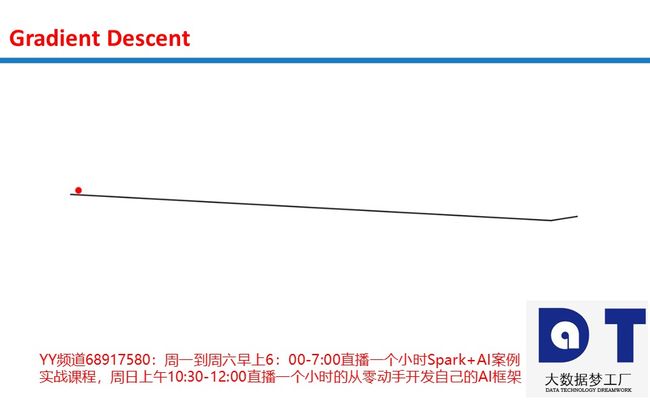
增量过小更明显的一个症状也许是收敛需要花很长很长的时间。
解决方案三:增加alpha
如同你可能期望的一样,增加alpha可以对付这两个症状。我们甚至可以给增量乘上一个大于1的权重。这很罕见,但有时我们确实需要这么做。
四、神经网络中的SGD
到了这一步,你可能想知道,这和神经网络还有反向传播有什么关系?这是最难的部分
看到上图中的曲线没有?在神经网络中,我们试图最小化对应权重的误差。所以,那条曲线代表对应于单个权重的位置的网络误差。因此,如果我们为单个权重的每个可能值计算网络误差,就得到了上图中的曲线。接着我们将选中具有最小误差(曲线的最低点)的单个权重的值。我说单个权重是因为这是一个二维图形。所以,x维是权重的值,而y维是权重在此位置时神经网络的误差。
双层神经网络:
import numpy as np
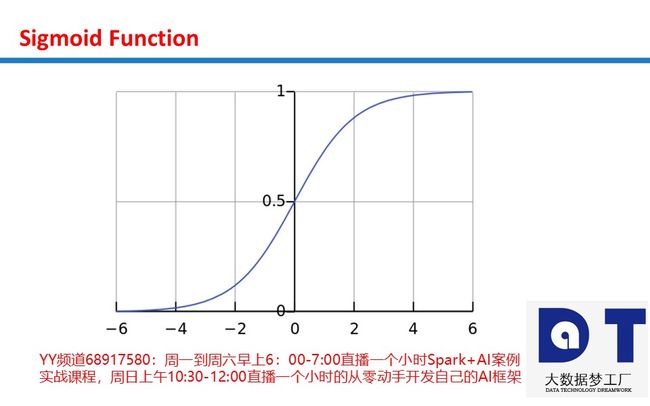
# compute sigmoid nonlinearity
def sigmoid(x):
output = 1/(1+np.exp(-x))
return output
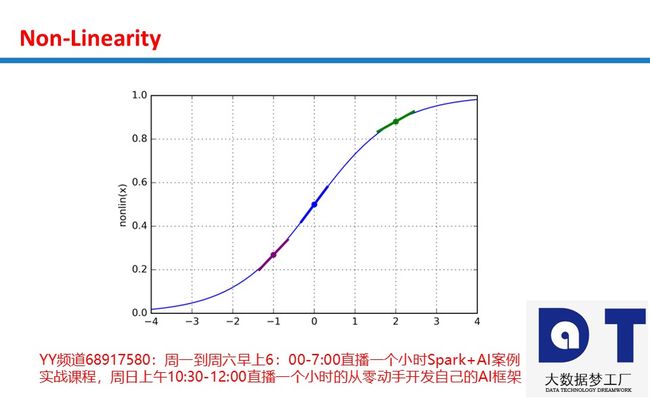
# convert output of sigmoid function to its derivative
def sigmoid_output_to_derivative(output):
return output*(1-output)
# input dataset
X = np.array([ [0,1],
[0,1],
[1,0],
[1,0] ])
# output dataset
y = np.array([[0,0,1,1]]).T
# seed random numbers to make calculation
# deterministic (just a good practice)
np.random.seed(1)
# initialize weights randomly with mean 0
synapse_0 = 2*np.random.random((2,1)) - 1
for iter in xrange(10000):
# forward propagation
layer_0 = X
layer_1 = sigmoid(np.dot(layer_0,synapse_0))
# how much did we miss?
layer_1_error = layer_1 - y
# multiply how much we missed by the
# slope of the sigmoid at the values in l1
layer_1_delta = layer_1_error * sigmoid_output_to_derivative(layer_1)
synapse_0_derivative = np.dot(layer_0.T,layer_1_delta)
# update weights
synapse_0 -= synapse_0_derivative
print "Output After Training:"
print layer_1
让我们尝试一下绘制上面的网络/数据集的这一误差平面,看看会是什么样的。所以,我们如何计算给定权重集合的误差呢?第31、32、35行代码展示了答案。如果我们绘制对应每个可能的权重集合(x和y在-10到10之间)的总误差(表示网络在整个数据集上的误差的单个标量),它看起来是这样的。
这其实很简单,不过是计算所有可能的权重集合,然后对应每个集合的网络误差而已。如你所见,我们的输出数据和第一个输入数据正相关。因此,当x(synapse_0的第一个权重)很大时,误差最小化。那么,请思考一下,synapse_0的第二个权重的情况是什么样的?它是何时达到最优的呢?
我们的双层神经网络如何优化:好,既然第31、32、35行计算误差,第39、40、43行自然就优化减少误差了。这是梯度下降发生的地方!
朴素梯度下降
- 第39、40行: 计算当前位置x的斜率
- 第43行:从x减去斜率(x = x - 斜率)
- 第28行:(重复这一过程,直到斜率为零)
- 这完全是一回事!唯一改变的是我们有2个权重,所以我们优化2个权重而不是1个。不过,逻辑是完全一样的。
五、改进我们的网络
改进一:增加并调优alpha参数什么是alpha? 如上所述,alpha参数以最简单的方式降低每次迭代更新的幅度。在更新权重前的最后时刻,我们将权重更新乘以alpha(通常位于0到1之间,从而降低权重更新的幅度)。这一微小的代码改动对训练能力绝对有巨大的影响。 在合适的地方加上alpha参数。接着,我们将运行一系列试验,用alpha参数在实际代码中的表现印证我们发展的所有关于alpha的直觉。
梯度下降改进版
- 计算当前位置x的斜率
- 第56、57行: x = x - alpha * 斜率
- (重复这一过程,直到斜率为零)
import numpy as np
alphas = [0.001,0.01,0.1,1,10,100,1000]
# compute sigmoid nonlinearity
def sigmoid(x):
output = 1/(1+np.exp(-x))
return output
# convert output of sigmoid function to its derivative
def sigmoid_output_to_derivative(output):
return output*(1-output)
X = np.array([[0,0,1],
[0,1,1],
[1,0,1],
[1,1,1]])
y = np.array([[0],
[1],
[1],
[0]])
for alpha in alphas:
print "\nTraining With Alpha:" + str(alpha)
np.random.seed(1)
# randomly initialize our weights with mean 0
synapse_0 = 2*np.random.random((3,4)) - 1
synapse_1 = 2*np.random.random((4,1)) - 1
for j in xrange(60000):
# Feed forward through layers 0, 1, and 2
layer_0 = X
layer_1 = sigmoid(np.dot(layer_0,synapse_0))
layer_2 = sigmoid(np.dot(layer_1,synapse_1))
# how much did we miss the target value?
layer_2_error = layer_2 - y
if (j% 10000) == 0:
print "Error after "+str(j)+" iterations:" + str(np.mean(np.abs(layer_2_error)))
# in what direction is the target value?
# were we really sure? if so, don't change too much.
layer_2_delta = layer_2_error*sigmoid_output_to_derivative(layer_2)
# how much did each l1 value contribute to the l2 error (according to the weights)?
layer_1_error = layer_2_delta.dot(synapse_1.T)
# in what direction is the target l1?
# were we really sure? if so, don't change too much.
layer_1_delta = layer_1_error * sigmoid_output_to_derivative(layer_1)
synapse_1 -= alpha * (layer_1.T.dot(layer_2_delta))
synapse_0 -= alpha * (layer_0.T.dot(layer_1_delta))
Training With Alpha:0.001
Error after 0 iterations:0.496410031903
Error after 10000 iterations:0.495164025493
Error after 20000 iterations:0.493596043188
Error after 30000 iterations:0.491606358559
Error after 40000 iterations:0.489100166544
Error after 50000 iterations:0.485977857846
Training With Alpha:0.01
Error after 0 iterations:0.496410031903
Error after 10000 iterations:0.457431074442
Error after 20000 iterations:0.359097202563
Error after 30000 iterations:0.239358137159
Error after 40000 iterations:0.143070659013
Error after 50000 iterations:0.0985964298089
Training With Alpha:0.1
Error after 0 iterations:0.496410031903
Error after 10000 iterations:0.0428880170001
Error after 20000 iterations:0.0240989942285
Error after 30000 iterations:0.0181106521468
Error after 40000 iterations:0.0149876162722
Error after 50000 iterations:0.0130144905381
Training With Alpha:1
Error after 0 iterations:0.496410031903
Error after 10000 iterations:0.00858452565325
Error after 20000 iterations:0.00578945986251
Error after 30000 iterations:0.00462917677677
Error after 40000 iterations:0.00395876528027
Error after 50000 iterations:0.00351012256786
Training With Alpha:10
Error after 0 iterations:0.496410031903
Error after 10000 iterations:0.00312938876301
Error after 20000 iterations:0.00214459557985
Error after 30000 iterations:0.00172397549956
Error after 40000 iterations:0.00147821451229
Error after 50000 iterations:0.00131274062834
Training With Alpha:100
Error after 0 iterations:0.496410031903
Error after 10000 iterations:0.125476983855
Error after 20000 iterations:0.125330333528
Error after 30000 iterations:0.125267728765
Error after 40000 iterations:0.12523107366
Error after 50000 iterations:0.125206352756
Training With Alpha:1000
Error after 0 iterations:0.496410031903
Error after 10000 iterations:0.5
Error after 20000 iterations:0.5
Error after 30000 iterations:0.5
Error after 40000 iterations:0.5
Error after 50000 iterations:0.5Alpha = 0.001
这样一个alpha小得的网络差点不能收敛!这是因为我们所做的权重更新如此之小,以至于我们基本上没有改变什么,即使是在60000次迭代之后!这是一个教科书般的例子:问题三 坡度过小。
Alpha = 0.01
这个alpha值达成了一个相当不错的收敛。在60000次迭代的过程中,它收敛的过程很平滑,但最终不如另一些alpha收敛得好。这仍然是一个教科书般的例子:问题三 坡度过小。
Alpha = 0.1
这个alpha值非常迅速地取得了一些进展,不过接着进展就要慢一些。仍然是因为问题三。我们需要加大一点alpha。
Alpha = 1
聪明的读者大概已经想到了,这和没有alpha的收敛效果一样!权重更新乘以1,什么都没有改变。
Alpha = 10
也许你会惊讶,一个大于1的alpha值仅仅在10000次迭代后就取得了比其他alpha值的最终结果都要好的分数!这告诉我们,基于较小alpha的权重更新过于保守了。也就是说,基于较小的alpha值时,网络的权重基本上朝着正确的方向走,只不过它们需要加快一点速度。
Alpha = 100
现在我们可以看到,步幅过大会适得其反。网络的步子迈得太大,以至于无法在误差平面上找到一个合理的低点。这是一个教科书般的问题一的例子。alpha过大,因此它只是在误差平面上跳来跳去,永远不会安心地呆在局部极小值处。
Alpha = 1000
一个极端巨大的alpha让我们看到了一个发散的教科书般的例子,误差不降反增……硬化于0.5. 这是一个更极端的问题一的例子,它横冲直撞,结果欲速则不达,最后离任何局部极小值都很远。
让我们仔细看看
import numpy as np
alphas = [0.001,0.01,0.1,1,10,100,1000]
# compute sigmoid nonlinearity
def sigmoid(x):
output = 1/(1+np.exp(-x))
return output
# convert output of sigmoid function to its derivative
def sigmoid_output_to_derivative(output):
return output*(1-output)
X = np.array([[0,0,1],
[0,1,1],
[1,0,1],
[1,1,1]])
y = np.array([[0],
[1],
[1],
[0]])
for alpha in alphas:
print "\nTraining With Alpha:" + str(alpha)
np.random.seed(1)
# randomly initialize our weights with mean 0
synapse_0 = 2*np.random.random((3,4)) - 1
synapse_1 = 2*np.random.random((4,1)) - 1
prev_synapse_0_weight_update = np.zeros_like(synapse_0)
prev_synapse_1_weight_update = np.zeros_like(synapse_1)
synapse_0_direction_count = np.zeros_like(synapse_0)
synapse_1_direction_count = np.zeros_like(synapse_1)
for j in xrange(60000):
# Feed forward through layers 0, 1, and 2
layer_0 = X
layer_1 = sigmoid(np.dot(layer_0,synapse_0))
layer_2 = sigmoid(np.dot(layer_1,synapse_1))
# how much did we miss the target value?
layer_2_error = y - layer_2
if (j% 10000) == 0:
print "Error:" + str(np.mean(np.abs(layer_2_error)))
# in what direction is the target value?
# were we really sure? if so, don't change too much.
layer_2_delta = layer_2_error*sigmoid_output_to_derivative(layer_2)
# how much did each l1 value contribute to the l2 error (according to the weights)?
layer_1_error = layer_2_delta.dot(synapse_1.T)
# in what direction is the target l1?
# were we really sure? if so, don't change too much.
layer_1_delta = layer_1_error * sigmoid_output_to_derivative(layer_1)
synapse_1_weight_update = (layer_1.T.dot(layer_2_delta))
synapse_0_weight_update = (layer_0.T.dot(layer_1_delta))
if(j > 0):
synapse_0_direction_count += np.abs(((synapse_0_weight_update > 0)+0) - ((prev_synapse_0_weight_update > 0) + 0))
synapse_1_direction_count += np.abs(((synapse_1_weight_update > 0)+0) - ((prev_synapse_1_weight_update > 0) + 0))
synapse_1 += alpha * synapse_1_weight_update
synapse_0 += alpha * synapse_0_weight_update
prev_synapse_0_weight_update = synapse_0_weight_update
prev_synapse_1_weight_update = synapse_1_weight_update
print "Synapse 0"
print synapse_0
print "Synapse 0 Update Direction Changes"
print synapse_0_direction_count
print "Synapse 1"
print synapse_1
print "Synapse 1 Update Direction Changes"
print synapse_1_direction_countTraining With Alpha:0.001
Error:0.496410031903
Error:0.495164025493
Error:0.493596043188
Error:0.491606358559
Error:0.489100166544
Error:0.485977857846
Synapse 0
[[-0.28448441 0.32471214 -1.53496167 -0.47594822]
[-0.7550616 -1.04593014 -1.45446052 -0.32606771]
[-0.2594825 -0.13487028 -0.29722666 0.40028038]]
Synapse 0 Update Direction Changes
[[ 0. 0. 0. 0.]
[ 0. 0. 0. 0.]
[ 1. 0. 1. 1.]]
Synapse 1
[[-0.61957526]
[ 0.76414675]
[-1.49797046]
[ 0.40734574]]
Synapse 1 Update Direction Changes
[[ 1.]
[ 1.]
[ 0.]
[ 1.]]
Training With Alpha:0.01
Error:0.496410031903
Error:0.457431074442
Error:0.359097202563
Error:0.239358137159
Error:0.143070659013
Error:0.0985964298089
Synapse 0
[[ 2.39225985 2.56885428 -5.38289334 -3.29231397]
[-0.35379718 -4.6509363 -5.67005693 -1.74287864]
[-0.15431323 -1.17147894 1.97979367 3.44633281]]
Synapse 0 Update Direction Changes
[[ 1. 1. 0. 0.]
[ 2. 0. 0. 2.]
[ 4. 2. 1. 1.]]
Synapse 1
[[-3.70045078]
[ 4.57578637]
[-7.63362462]
[ 4.73787613]]
Synapse 1 Update Direction Changes
[[ 2.]
[ 1.]
[ 0.]
[ 1.]]
Training With Alpha:0.1
Error:0.496410031903
Error:0.0428880170001
Error:0.0240989942285
Error:0.0181106521468
Error:0.0149876162722
Error:0.0130144905381
Synapse 0
[[ 3.88035459 3.6391263 -5.99509098 -3.8224267 ]
[-1.72462557 -5.41496387 -6.30737281 -3.03987763]
[ 0.45953952 -1.77301389 2.37235987 5.04309824]]
Synapse 0 Update Direction Changes
[[ 1. 1. 0. 0.]
[ 2. 0. 0. 2.]
[ 4. 2. 1. 1.]]
Synapse 1
[[-5.72386389]
[ 6.15041318]
[-9.40272079]
[ 6.61461026]]
Synapse 1 Update Direction Changes
[[ 2.]
[ 1.]
[ 0.]
[ 1.]]
Training With Alpha:1
Error:0.496410031903
Error:0.00858452565325
Error:0.00578945986251
Error:0.00462917677677
Error:0.00395876528027
Error:0.00351012256786
Synapse 0
[[ 4.6013571 4.17197193 -6.30956245 -4.19745118]
[-2.58413484 -5.81447929 -6.60793435 -3.68396123]
[ 0.97538679 -2.02685775 2.52949751 5.84371739]]
Synapse 0 Update Direction Changes
[[ 1. 1. 0. 0.]
[ 2. 0. 0. 2.]
[ 4. 2. 1. 1.]]
Synapse 1
[[ -6.96765763]
[ 7.14101949]
[-10.31917382]
[ 7.86128405]]
Synapse 1 Update Direction Changes
[[ 2.]
[ 1.]
[ 0.]
[ 1.]]
Training With Alpha:10
Error:0.496410031903
Error:0.00312938876301
Error:0.00214459557985
Error:0.00172397549956
Error:0.00147821451229
Error:0.00131274062834
Synapse 0
[[ 4.52597806 5.77663165 -7.34266481 -5.29379829]
[ 1.66715206 -7.16447274 -7.99779235 -1.81881849]
[-4.27032921 -3.35838279 3.44594007 4.88852208]]
Synapse 0 Update Direction Changes
[[ 7. 19. 2. 6.]
[ 7. 2. 0. 22.]
[ 19. 26. 9. 17.]]
Synapse 1
[[ -8.58485788]
[ 10.1786297 ]
[-14.87601886]
[ 7.57026121]]
Synapse 1 Update Direction Changes
[[ 22.]
[ 15.]
[ 4.]
[ 15.]]
Training With Alpha:100
Error:0.496410031903
Error:0.125476983855
Error:0.125330333528
Error:0.125267728765
Error:0.12523107366
Error:0.125206352756
Synapse 0
[[-17.20515374 1.89881432 -16.95533155 -8.23482697]
[ 5.70240659 -17.23785161 -9.48052574 -7.92972576]
[ -4.18781704 -0.3388181 2.82024759 -8.40059859]]
Synapse 0 Update Direction Changes
[[ 8. 7. 3. 2.]
[ 13. 8. 2. 4.]
[ 16. 13. 12. 8.]]
Synapse 1
[[ 9.68285369]
[ 9.55731916]
[-16.0390702 ]
[ 6.27326973]]
Synapse 1 Update Direction Changes
[[ 13.]
[ 11.]
[ 12.]
[ 10.]]
Training With Alpha:1000
Error:0.496410031903
Error:0.5
Error:0.5
Error:0.5
Error:0.5
Error:0.5
Synapse 0
[[-56.06177241 -4.66409623 -5.65196179 -23.05868769]
[ -4.52271708 -4.78184499 -10.88770202 -15.85879101]
[-89.56678495 10.81119741 37.02351518 -48.33299795]]
Synapse 0 Update Direction Changes
[[ 3. 2. 4. 1.]
[ 1. 2. 2. 1.]
[ 6. 6. 4. 1.]]
Synapse 1
[[ 25.16188889]
[ -8.68235535]
[-116.60053379]
[ 11.41582458]]
Synapse 1 Update Direction Changes
[[ 7.]
[ 7.]
[ 7.]
[ 3.]]几点总结:
- alpha很小时,导数几乎从不改变方向。
- alpha最优时,导数多次改变方向。
- alpha很大时,导数改变方向的次数中等。
- alpha很小时,最终权重也很小。
- alpha很大时,权重也变得很大。
能够增加隐藏层的话,可以增加每次迭代收敛的搜索空间数量。
import numpy as np
alphas = [0.001,0.01,0.1,1,10,100,1000]
hiddenSize = 32
# compute sigmoid nonlinearity
def sigmoid(x):
output = 1/(1+np.exp(-x))
return output
# convert output of sigmoid function to its derivative
def sigmoid_output_to_derivative(output):
return output*(1-output)
X = np.array([[0,0,1],
[0,1,1],
[1,0,1],
[1,1,1]])
y = np.array([[0],
[1],
[1],
[0]])
for alpha in alphas:
print "\nTraining With Alpha:" + str(alpha)
np.random.seed(1)
# randomly initialize our weights with mean 0
synapse_0 = 2*np.random.random((3,hiddenSize)) - 1
synapse_1 = 2*np.random.random((hiddenSize,1)) - 1
for j in xrange(60000):
# Feed forward through layers 0, 1, and 2
layer_0 = X
layer_1 = sigmoid(np.dot(layer_0,synapse_0))
layer_2 = sigmoid(np.dot(layer_1,synapse_1))
# how much did we miss the target value?
layer_2_error = layer_2 - y
if (j% 10000) == 0:
print "Error after "+str(j)+" iterations:" + str(np.mean(np.abs(layer_2_error)))
# in what direction is the target value?
# were we really sure? if so, don't change too much.
layer_2_delta = layer_2_error*sigmoid_output_to_derivative(layer_2)
# how much did each l1 value contribute to the l2 error (according to the weights)?
layer_1_error = layer_2_delta.dot(synapse_1.T)
# in what direction is the target l1?
# were we really sure? if so, don't change too much.
layer_1_delta = layer_1_error * sigmoid_output_to_derivative(layer_1)
synapse_1 -= alpha * (layer_1.T.dot(layer_2_delta))
synapse_0 -= alpha * (layer_0.T.dot(layer_1_delta))
Training With Alpha:0.001
Error after 0 iterations:0.496439922501
Error after 10000 iterations:0.491049468129
Error after 20000 iterations:0.484976307027
Error after 30000 iterations:0.477830678793
Error after 40000 iterations:0.46903846539
Error after 50000 iterations:0.458029258565
Training With Alpha:0.01
Error after 0 iterations:0.496439922501
Error after 10000 iterations:0.356379061648
Error after 20000 iterations:0.146939845465
Error after 30000 iterations:0.0880156127416
Error after 40000 iterations:0.065147819275
Error after 50000 iterations:0.0529658087026
Training With Alpha:0.1
Error after 0 iterations:0.496439922501
Error after 10000 iterations:0.0305404908386
Error after 20000 iterations:0.0190638725334
Error after 30000 iterations:0.0147643907296
Error after 40000 iterations:0.0123892429905
Error after 50000 iterations:0.0108421669738
Training With Alpha:1
Error after 0 iterations:0.496439922501
Error after 10000 iterations:0.00736052234249
Error after 20000 iterations:0.00497251705039
Error after 30000 iterations:0.00396863978159
Error after 40000 iterations:0.00338641021983
Error after 50000 iterations:0.00299625684932
Training With Alpha:10
Error after 0 iterations:0.496439922501
Error after 10000 iterations:0.00224922117381
Error after 20000 iterations:0.00153852153014
Error after 30000 iterations:0.00123717718456
Error after 40000 iterations:0.00106119569132
Error after 50000 iterations:0.000942641990774
Training With Alpha:100
Error after 0 iterations:0.496439922501
Error after 10000 iterations:0.5
Error after 20000 iterations:0.5
Error after 30000 iterations:0.5
Error after 40000 iterations:0.5
Error after 50000 iterations:0.5
Training With Alpha:1000
Error after 0 iterations:0.496439922501
Error after 10000 iterations:0.5
Error after 20000 iterations:0.5
Error after 30000 iterations:0.5
Error after 40000 iterations:0.5
Error after 50000 iterations:0.5六、结语和以后的工作
如果你对神经网络的态度是严肃的,那有一个建议,自己编码实现这个网络。这也许听起来有点疯狂,但它切切实实很有帮助。如果你希望能够根据最新的学术论文创建任意的神经网络架构,或者阅读和理解不同架构的代码样例,这是一个杀手级练习。即使你使用Torch、Caffe、Theano之类的框架,这仍是有用的。如果你打算进一步改进你的网络,下面是一些值得了解的概念。
- Bias Units(偏置单元)
- Mini-Batches
- Delta Trimming
- Parameterized Layer Sizes(参数化的层尺寸)
- Regularization(正则化)
- Dropout
- Momentum(动量)
- Batch Normalization
- GPU兼容性
- 其他酷炫特性
家林大神授课的四种性能优化Matrix编写AI框架实战 从(ANN_V1.py -ANN_V6.py)演化迭代改进六个版本的代码示意图

3980元团购原价19800元的AI课程,团购请加王家林老师微信13928463918
基于王家林老师独创的人工智能“项目情景投射”学习法,任何IT人员皆可在无需数学和Python语言的基础上的情况下3个月左右的时间成为AI技术实战高手:
1,五节课(分别在4月9-13号早上YY视频直播)教你从零起步(无需Python和数学基础)开发出自己的AI深度学习框架,五节课的学习可能胜过你五年的自我摸索;
2,30个真实商业案例代码中习得AI(从零起步到AI实战专家之路):10大机器学习案例、13大深度学习案例、7大增强学习案例(本文档中有案例的详细介绍和案例实现代码截图);
3,100天的涅槃蜕变,平均每天学习1个小时(周一到周六早上6:00-7:00YY频道68917580视频直播),周末复习每周的6个小时的直播课程(报名学员均可获得所有的直播视频、全部的商业案例完整代码、最具阅读价值的AI资料等)。
五节课从零起步(无需数学和Python基础)编码实现AI人工智能框架电子书V1
https://download.csdn.net/download/duan_zhihua/10380279
30个真实商业案例代码中成为AI实战专家(10大机器学习案例、13大深度学习案例、7大增强学习案例)课程大纲
https://download.csdn.net/download/duan_zhihua/10366665
数统治着宇宙。——毕达哥拉斯