多目标跟踪-DeepSort分析(一)论文解读及代码架构
先引入多目标跟踪DeepSort的论文地址及代码链接(Python版):
论文地址:https://arxiv.org/pdf/1703.07402.pdf
代码链接:https://github.com/nwojke/deep_sort
写在前面:
这些天看了deepsort的论文及源码,并在网上检索一些相关资料(不是很多),现结合论文、博客及自己的理解进行总结。
本文为第一篇,首先对论文进行解读,然后对github的代码进行简要的流程分析及解读,后期还会对所用算法进行具体的展开。
本文结构:
一、论文重点部分解读
二、代码流程及算法分析
1. 论文重点部分解读
1.1. 轨迹处理及状态估计(track handing and state estimation)
第i时刻的状态用8维状态空间表示:
![]()
其中,u,v表示目标框的中心坐标;
γ,h(第三和第四个值)表示宽高比(宽高比应该为一个常量)、高度;
以上四个值构成观测变量。
以及图像坐标系下的速度(导数)
对于每条轨迹 k 都有一个阈值a用于记录轨迹从上一次成功匹配到当前时刻的时间。当该值大于提前设置的阈值 Amax 则认为改轨迹终止,直观上说就是长时间匹配不上的轨迹认为已经结束。
轨迹的三种状态:(在代码中定义为枚举变量)
tentative(初始默认状态)
confirmed
deleted
enum TrackState
{
Tentative = 1
Confirmed = 2
Deleted = 3
}
在匹配时,对于没有匹配成功的检测都认为可能产生新的轨迹。但由于这些检测结果可能是一些错误警告,所以:
对这种新生成的轨迹标注状态 tentative (初始默认状态);
然后判定在接下来的连续3帧中是否连续匹配成功,若成功,则标注为 confirmed ,认为是新轨迹产生;
否则,标注为 deleted,删除 。另外,超过预先设置的Amax = 30 的轨迹,也被认为离开场景,并标注为 deleted,删除 。
if self.state == TrackState.Tentative:
self.state = TrackState.Deleted
elif self.time_since_update > self._max_age:
self.state = TrackState.Deleted
1.2分配(匹配)问题(assignment problem)
这里的匹配,是只当前被标注为“ confirmed ”的轨迹(即有效轨迹)与当前的检测之间的匹配。
使用匈牙利算法进行目标框的匹配;
使用运动匹配和外观匹配对目标框进行匹配。
1.2.1运动匹配
用Mahalanobis距离(马氏距离)来表示第j个检测和第i条轨迹之间的运动匹配程度。公式如下图所示:

其中,
dj表示第j个检测的状态;
yi是轨迹在当前时刻的预测值;
si是轨迹,由kalman滤波器预测得到的;
通过该马氏距离对检测框进行筛选,使用卡方分布的0.95分位点作为阈值。
1.2.2外观匹配
在实际中,比如相机运动,都会导致马氏距离匹配失效,因此引入余弦距离(第i次跟踪和第j次检测的最小余弦距离)来进行外观匹配,该匹配对长时间遮挡后恢复尤其有用,公式如下:

最后,利用加权的方式对这两个距离进行融合。关联度量的总公式如下所示:

其中,λ设置为0(论文中)。
1.3级联匹配(matching cascade)
//# Run matching cascade.
typedef std::vector IDS;
struct RR
{
std::vector> matches;
IDS unmatched_detections;
IDS unmatched_tracks;
};
RR _match(const std::vector &detections)
{
int64_t mtm1 = line_gtm();
//Split track set into confirmed and unconfirmed kalmanTrackers.
IDS confirmed_trackIds;
IDS unconfirmed_trackIds;
for (int i = 0; i < kalmanTrackers_.size(); i++)
{
KalmanTracker t = kalmanTrackers_[i];
if (t->is_confirmed())
{
confirmed_trackIds.push_back(i);
}
else
{
unconfirmed_trackIds.push_back(i);
}
}
//# Associate confirmed kalmanTrackers using appearance features.
RR rr = linear_assignment::matching_cascade(
getCostMatrixByNND,
NearestNeighborDistanceMetric::Instance()->matching_threshold(),
max_age_,
kalmanTrackers_,
detections,
&confirmed_trackIds);
std::vector> matches_a = rr.matches;
IDS unmatched_tracks_a = rr.unmatched_tracks;
IDS unmatched_detections = rr.unmatched_detections;
int64_t mtm2 = line_gtm();
//# Associate remaining kalmanTrackers together with unconfirmed kalmanTrackers using IOU.
IDS iou_track_candidateIds, tmp;
std::copy(unconfirmed_trackIds.begin(),
unconfirmed_trackIds.end(),
std::back_inserter(iou_track_candidateIds));
for (int k = 0; k < unmatched_tracks_a.size(); k++)
{
int id = unmatched_tracks_a[k];
if (kalmanTrackers_[id]->time_since_update_ == 1)
{
iou_track_candidateIds.push_back(id);
}
else
{
tmp.push_back(id);
}
}
unmatched_tracks_a.clear();
unmatched_tracks_a = tmp;
int64_t mtm3 = line_gtm();
RR rr1 = linear_assignment::min_cost_matching(
iou_matching::getCostMatrixByIOU,
max_iou_distance_,
kalmanTrackers_,
detections,
&iou_track_candidateIds,
&unmatched_detections);
std::vector> matches_b = rr1.matches;
IDS unmatched_tracks_b = rr1.unmatched_tracks;
unmatched_detections = rr1.unmatched_detections;
int64_t mtm4 = line_gtm();
RR re;
re.matches = matches_a;
std::copy(matches_b.begin(), matches_b.end(),
std::back_inserter(re.matches));
re.unmatched_detections = unmatched_detections;
re.unmatched_tracks = unmatched_tracks_a;
std::copy(unmatched_tracks_b.begin(),
unmatched_tracks_b.end(),
std::back_inserter(re.unmatched_tracks));
int64_t mtm5 = line_gtm();
return re;
}
int _NewTrack(const Detection &detection)
{
int id = _next_id_;
std::pair pa =
KF::Instance()->initiate(detection.to_xyah());
KalmanTracker newt(new KalmanTrackerN(
pa.first, pa.second, _next_id_, n_init_, max_age_,
detection.feature_, true, detection.oriPos_));
kalmanTrackers_.push_back(newt);
_next_id_ += 1;
return id;
}
};
RR rr = this->_match(detections);
当一个目标被遮挡很长时间,Kalman滤波的不确定性就会大大增加,为了解决该问题 ,论文采用级联匹配的策略来提高匹配精度。文中算法如下图所示:
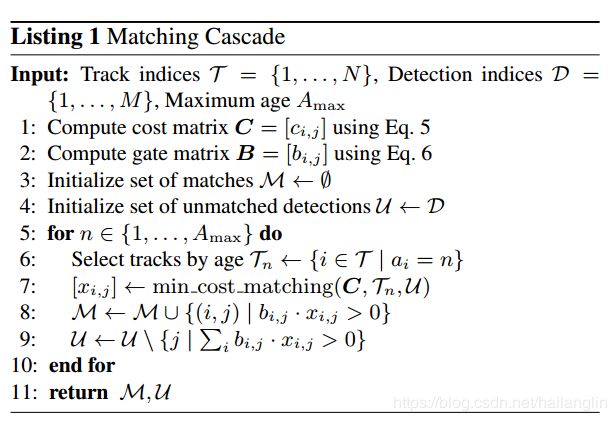
其中,T表示目标跟踪集合
D表示目标检测集合
C矩阵存放所有目标跟踪与目标检测之间距离的计算结果
B矩阵存放所有目标跟踪与目标检测之间是否关联的判断(0或者1)
M,U为返回值,分别表示匹配集合和非匹配集合。
1.4深度表观特征(deep appearance descriptor)
论文中,作者用一个深度卷积神经网络去提取目标的特征信息,论文中的预训练的网络是在一个ReID的大数据集上训练得到的,包含1261个人的1100000幅图像,非常适合对人物目标跟踪。
网络结构如下:

该网络有2,800,864参数和32个目标框,在NVIDIA GTX1050上需要30ms。
2.代码流程及算法分析(待补充)
2.1detection
检测基类。
2.2HungarianOper
匈牙利指派,采用的是匈牙利算法/Hungrain/带权重的二分图指派算法Munkres Alogrithm。
2.3iou_matching
IOU匹配模块。(Iou–重叠区域面积)
2.4kalman_filter
卡尔曼滤波器,该模块实现图像空间的目标状态的预测/创建及移除,即滤波的具体参数化。
2.5linear_assignment
线性匹配–用最小的cost-matirx匹配级联。考虑了运动信息和外观信息。
for (int row = 0; row < track_indices.size(); row++)
{
int track_idx = track_indices[row];
KalmanTracker track = tracks[track_idx];
//计算detection中边框 dj(u,v,r,h)dj(u,v,r,h)和Track中的边框 yiyi之间的马氏距离
//计算 predicted Kalman states 和newly arrived measurements之间的马氏距离
Eigen::Matrix gating_distance = kalmanFilter.gating_distance(
track->mean_, track->covariance_, measurements, only_position);
for (int i = 0; i < gating_distance.cols(); i++)
// gating_distance is a vector
{
if (gating_distance(0, i) > gating_threshold)
{
cost_matrix(row, i) = gated_cost;
}
}
}
return cost_matrix;
2.6nn_matching
最近邻匹配模块。
2.7tracker
目标跟踪。