使用Pytorch搭建CNN
文章目录
- 卷积
- 卷积层
- GPU
- CNN(卷积神经网络)
- 一个简单的CNN
- 准备数据与训练模型
- ResNet
- 改变学习率
- SE
- Vgg
卷积
下面的conv函数实现了对二维单通道图像的卷积.考虑输入的卷积核kernel的长宽相同,padding为对图像的四个边缘补0,stride为卷积核窗口滑动的步长.
import numpy as np
def convolution(img, kernel, padding=1, stride=1):
"""
img: input image with one channel
kernel: convolution kernel
"""
h, w = img.shape
kernel_size = kernel.shape[0]
# 获取扩增之后的图像
ph, pw = h + 2 * padding, w + 2 * padding
padding_img = np.zeros((ph, pw))
padding_img[padding:h + padding, padding:w + padding] = img
# 获取经过卷积之后的完整图像
result_h = (h + 2 * padding - kernel_size) // stride + 1
result_w = (w + 2 * padding - kernel_size) // stride + 1
result = np.zeros((result_h, result_w))
# 进行卷积运算
x, y = 0, 0
for i in range(0, ph - kernel_size + 1, stride):
for j in range(0, pw - kernel_size + 1, stride):
roi = padding_img[i:i+kernel_size, j:j+kernel_size]
result[x, y] = np.sum(roi * kernel)
y += 1
y = 0
x += 1
return result
下面在图像上简单一下测试我们的conv函数,这里使用3*3的高斯核对下面的图像进行滤波.

from PIL import Image
import matplotlib.pyplot as plt
img = Image.open('pics/lena.jpg').convert('L')
plt.imshow(img, cmap='gray')

# 拉普拉斯
laplace_kernel = np.array([[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]])
# 高斯
gauss_kernel3 = (1/ 16) * np.array([[1, 2, 1],
[2, 4, 2],
[1, 2, 1]])
# size为5的高斯
gauss_kernel5 = (1/ 84) * np.array([[1, 2, 3, 2, 1],
[2, 5, 6, 5, 2],
[3, 6, 8, 6, 3],
[2, 5, 6, 5, 2],
[1, 2, 3, 2, 1]])
fig, ax = plt.subplots(1, 3, figsize=(12, 8))
laplace_img = convolution(np.array(img), laplace_kernel, padding=1, stride=1)
ax[0].imshow(Image.fromarray(laplace_img), cmap='gray')
ax[0].set_title('laplace')
gauss3_img = convolution(np.array(img), gauss_kernel3, padding=1, stride=1)
ax[1].imshow(Image.fromarray(gauss3_img), cmap='gray')
ax[1].set_title('gauss kernel_size=3')
gauss5_img = convolution(np.array(img), gauss_kernel5, padding=2, stride=1)
ax[2].imshow(Image.fromarray(gauss5_img), cmap='gray')
ax[2].set_title('gauss kernel_size=5')
Text(0.5, 1.0, 'gauss kernel_size=5')

上面我们实现了实现了对单通道输入单通道输出的卷积.在CNN中,一般使用到的都是多通道输入多通道输出的卷积,要实现多通道的卷积, 我们只需要对循环调用上面的conv函数即可.
def myconv2d(features, weights, padding=0, stride=1):
"""
features: input, in_channel * h * w
weights: kernel, out_channel * in_channel * kernel_size * kernel_size
return output with out_channel
"""
in_channel, h, w = features.shape
out_channel, _, kernel_size, _ = weights.shape
# height and width of output image
output_h = (h + 2 * padding - kernel_size) // stride + 1
output_w = (w + 2 * padding - kernel_size) // stride + 1
output = np.zeros((out_channel, output_h, output_w))
# call convolution out_channel * in_channel times
for i in range(out_channel):
weight = weights[i]
for j in range(in_channel):
feature_map = features[j]
kernel = weight[j]
output[i] += convolution(feature_map, kernel, padding, stride)
return output
接下来, 让我们测试我们写好的myconv2d函数.
input_data=[
[[0,0,2,2,0,1],
[0,2,2,0,0,2],
[1,1,0,2,0,0],
[2,2,1,1,0,0],
[2,0,1,2,0,1],
[2,0,2,1,0,1]],
[[2,0,2,1,1,1],
[0,1,0,0,2,2],
[1,0,0,2,1,0],
[1,1,1,1,1,1],
[1,0,1,1,1,2],
[2,1,2,1,0,2]]
]
weights_data=[[
[[ 0, 1, 0],
[ 1, 1, 1],
[ 0, 1, 0]],
[[-1, -1, -1],
[ -1, 8, -1],
[ -1, -1, -1]]
]]
# numpy array
input_data = np.array(input_data)
weights_data = np.array(weights_data)
# show the result
print(myconv2d(input_data, weights_data, padding=3, stride=3))
[[[ 0. 0. 0. 0.]
[ 0. 8. 10. 0.]
[ 0. -5. 2. 0.]
[ 0. 0. 0. 0.]]]
在Pytorch中,已经为我们提供了卷积和卷积层的实现.使用同样的input和weights,以及stride,padding,pytorch的卷积的结果应该和我们的一样.可以在下面的代码中进行验证.
import torch
import torch.nn.functional as F
input_tensor = torch.tensor(input_data).unsqueeze(0).float()
F.conv2d(input_tensor, weight=torch.tensor(weights_data).float(), bias=None, stride=3, padding=3)
tensor([[[[ 0., 0., 0., 0.],
[ 0., 8., 10., 0.],
[ 0., -5., 2., 0.],
[ 0., 0., 0., 0.]]]])
考虑卷积时padding和stride在不同方向不一致的情况
def convolutionV2(img, kernel, padding=(0,0), stride=(1,1)):
h, w = img.shape
kh, kw = kernel.shape
# height and width of image with padding
ph, pw = h + 2 * padding[0], w + 2 * padding[1]
padding_img = np.zeros((ph, pw))
padding_img[padding[0]:int(h + padding[0]), padding[1]:int(w + padding[1])] = img
# height and width of output image
result_h = (h + 2 * padding[0] - kh) // stride[0] + 1
result_w = (w + 2 * padding[1] - kw) // stride[1] + 1
result = np.zeros((result_h, result_w))
# convolution
x, y = 0, 0
for i in range(0, ph - kh + 1, stride[0]):
for j in range(0, pw - kw + 1, stride[1]):
roi = padding_img[i:i+kh, j:j+kw]
result[x, y] = np.sum(roi * kernel)
y += 1
y = 0
x += 1
return result
# test input
test_input = np.array([[1, 1, 2, 1],
[0, 1, 0, 2],
[2, 2, 0, 2],
[2, 2, 2, 1],
[2, 3, 2, 3]])
test_kernel = np.array([[1, 0], [0, 1], [0, 0]])
# output
print(convolutionV2(test_input, test_kernel, padding=(1, 0), stride=(1, 1)))
print(convolutionV2(test_input, test_kernel, padding=(2, 1), stride=(1, 2)))
[[1. 2. 1.]
[2. 1. 4.]
[2. 1. 2.]
[4. 4. 1.]
[5. 4. 5.]]
[[0. 0. 0.]
[1. 2. 0.]
[0. 1. 1.]
[2. 1. 2.]
[2. 4. 2.]
[2. 4. 1.]
[0. 3. 3.]]
卷积层
Pytorch提供了卷积层和池化层供我们使用.
卷积层与上面相似, 而池化层与卷积层相似,Pooling layer的主要目的是缩小features的size.常用的有MaxPool(滑动窗口取最大值)与AvgPool(滑动窗口取均值)
import torch
import torch.nn as nn
x = torch.randn(1, 1, 32, 32)
conv_layer = nn.Conv2d(in_channels=1, out_channels=3, kernel_size=3, stride=1, padding=0)
y = conv_layer(x)
print(x.shape)
print(y.shape)
torch.Size([1, 1, 32, 32])
torch.Size([1, 3, 30, 30])
conv_layer = nn.Conv2d(in_channels=1, out_channels=3, kernel_size=5, stride=2, padding=2)
y = conv_layer(x)
print(x.shape)
print(y.shape)
torch.Size([1, 1, 32, 32])
torch.Size([1, 3, 16, 16])
问题:
- 输入与输出的tensor的size分别是多少?该卷积层的参数量是多少?
1*1*32*32、1*3*30*30,参数数量为3*3*3=27.
- 若kernel_size=5,stride=2,padding=2, 输出的tensor的size是多少?在上述代码中改变参数后试验后并回答.
(32+2*2-5)/2+1 = 16, 大小为1 * 3 * 16 * 16
- 若输入的tensor size为N*C*H*W,若第5行中卷积层的参数为in_channels=C,out_channels=Cout,kernel_size=k,stride=s,padding=p,那么输出的tensor size是多少?
N*Cout*((H+2*p-k)/s+1)*((W+2*p-k)/s+1)
# input N * C * H * W
x = torch.randn(1, 1, 4, 4)
# 最大池化
maxpool = nn.MaxPool2d(kernel_size=2, stride=2)
y = maxpool(x)
# 平均池化
avgpool = nn.AvgPool2d(kernel_size=2, stride=2)
z = avgpool(x)
#avgpool
print(x)
print(y)
print(z)
tensor([[[[ 0.5812, 0.9751, -2.0219, -0.0226],
[-0.3074, 1.6527, 1.6691, -0.1447],
[-2.2628, -0.2452, 0.9177, 0.1994],
[-0.7505, -0.3979, 0.1795, 0.2845]]]])
tensor([[[[ 1.6527, 1.6691],
[-0.2452, 0.9177]]]])
tensor([[[[ 0.7254, -0.1300],
[-0.9141, 0.3953]]]])
GPU
我们可以选择在cpu或gpu上来训练我们的模型.
要查看各个gpu设备的使用情况,可以在服务器上的jupyter主页点击new->terminal,在terminal中输入nvidia-smi即可查看每张卡的使用情况.如下图.
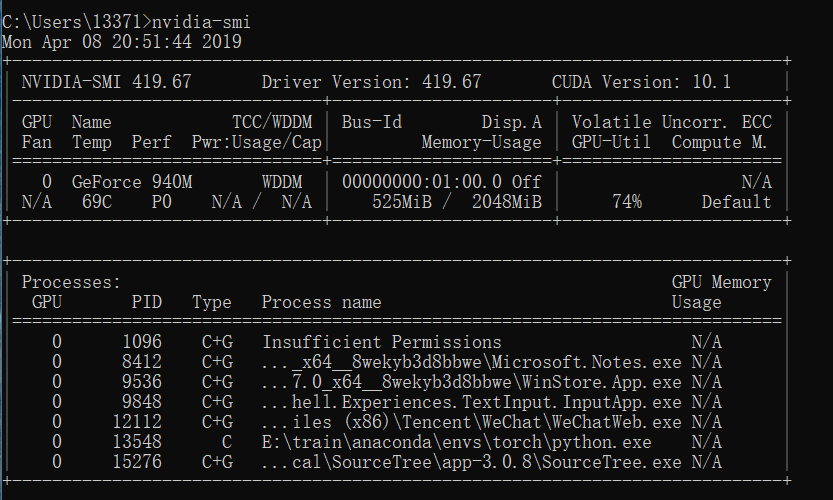
上图左边一栏显示了他们的设备id(0,1,2,3),风扇转速,温度,性能状态,能耗等信息,中间一栏显示他们的bus-id和显存使用量,右边一栏是GPU使用率等信息.注意到中间一栏的显存使用量,在训练模型前我们可以根据空余的显存来选择我们使用的gpu设备.
Fan: 风扇转速(0%–100%),N/A表示没有风扇
Temp: GPU温度(GPU温度过高会导致GPU频率下降)
Perf: 性能状态,从P0(最大性能)到P12(最小性能)
Memory-Usage:显存使用率
Volatile GPU-Util:GPU使用率
nvidia-smi –l 数字
动态刷新信息(默认5s刷新一次),按Ctrl+C停止,可指定刷新频率,以秒为单位
将代码中的torch.device(‘cuda:0’)的0更换成所需的设备id即可选择在相应的gpu设备上运行程序.
CNN(卷积神经网络)
一个简单的CNN
接下来,让我们建立一个简单的CNN分类器.
这个CNN的整体流程是
卷积(Conv2d) -> BN(batch normalization) -> 激励函数(ReLU) -> 池化(MaxPooling) ->
卷积(Conv2d) -> BN(batch normalization) -> 激励函数(ReLU) -> 池化(MaxPooling) ->
全连接层(Linear) -> 输出.
- torch.nn.Sequential是一个Sequential容器,模块将按照构造函数中传递的顺序添加到模块中。优点是不用挨个给每一层起变量名,并且写forward也是很简单的事情,不用一层一层地去运算了惹。
- BatchNorm2d传入的参数是channel的大小,也就是在channel水平上做批标准化。
- 由于(【imagesize】+2×1【padding】-3【kernelsize】)/1【stride】+1 = imagesize,因此卷积操作并不会改变图像的大小。
- 每个maxpool会把imagesize变为原来的一半,经历两次池化之后imagesize就变成了imagesize//4,其中//是除完的结果取整的意思。
import torch
import torch.nn as nn
import torch.utils.data as Data
import torchvision
class MyCNN(nn.Module):
def __init__(self, image_size, num_classes):
super(MyCNN, self).__init__()
# conv1: Conv2d -> BN -> ReLU -> MaxPool
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=16, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(16),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
)
# conv2: Conv2d -> BN -> ReLU -> MaxPool
self.conv2 = nn.Sequential(
nn.Conv2d(in_channels=16, out_channels=32, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(32),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
)
# fully connected layer
self.fc = nn.Linear(32 * (image_size // 4) * (image_size // 4), num_classes)
def forward(self, x):
"""
input: N * 3 * image_size * image_size
output: N * num_classes
"""
x = self.conv1(x)
x = self.conv2(x)
# view(x.size(0), -1): change tensor size from (N ,H , W) to (N, H*W)
x = x.view(x.size(0), -1)
output = self.fc(x)
return output
注意如何通过device,指定使用GPU进行运算
def train(model, train_loader, loss_func, optimizer, device):
"""
train model using loss_fn and optimizer in an epoch.
model: CNN networks
train_loader: a Dataloader object with training data
loss_func: loss function
device: train on cpu or gpu device
"""
total_loss = 0
# train the model using minibatch
for i, (images, targets) in enumerate(train_loader):
images = images.to(device)
targets = targets.to(device)
# forward
outputs = model(images)
loss = loss_func(outputs, targets)
# backward and optimize
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_loss += loss.item()
# every 100 iteration, print loss
if (i + 1) % 100 == 0:
print ("Step [{}/{}] Train Loss: {:.4f}"
.format(i+1, len(train_loader), loss.item()))
return total_loss / len(train_loader)
def evaluate(model, val_loader, device):
"""
model: CNN networks
val_loader: a Dataloader object with validation data
device: evaluate on cpu or gpu device
return classification accuracy of the model on val dataset
"""
# evaluate the model
model.eval()
# context-manager that disabled gradient computation
with torch.no_grad():
correct = 0
total = 0
for i, (images, targets) in enumerate(val_loader):
# device: cpu or gpu
images = images.to(device)
targets = targets.to(device)
outputs = model(images)
# return the maximum value of each row of the input tensor in the
# given dimension dim, the second return vale is the index location
# of each maxium value found(argmax)
_, predicted = torch.max(outputs.data, dim=1)
correct += (predicted == targets).sum().item()
total += targets.size(0)
accuracy = correct / total
print('Accuracy on Test Set: {:.4f} %'.format(100 * accuracy))
return accuracy
def save_model(model, save_path):
# save model
torch.save(model.state_dict(), save_path)
import matplotlib.pyplot as plt
def show_curve(ys, title):
"""
plot curlve for Loss and Accuacy
Args:
ys: loss or acc list
title: loss or accuracy
"""
x = np.array(range(len(ys)))
y = np.array(ys)
plt.plot(x, y, c='b')
plt.axis()
plt.title('{} curve'.format(title))
plt.xlabel('epoch')
plt.ylabel('{}'.format(title))
plt.show()
准备数据与训练模型
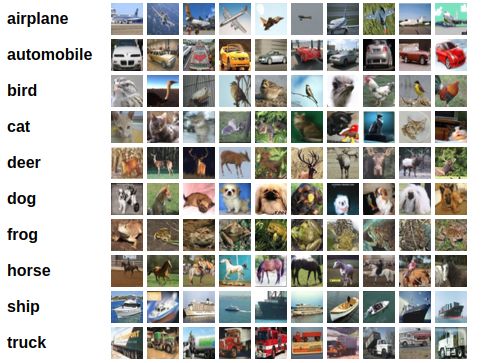
接下来,我们使用CIFAR10数据集来对我们的CNN模型进行训练.
CIFAR-10:该数据集共有60000张彩色图像,这些图像是32*32,分为10个类,每类6000张图.这里面有50000张用于训练,构成了5个训练批,每一批10000张图;另外10000用于测试,单独构成一批.在本次实验中,使用CIFAR-10数据集来训练我们的模型.我们可以用torchvision.datasets.CIFAR10来直接使用CIFAR10数据集.
为了减少训练时间以及降低传输时间,我们在这里提供了一个删减版的CIFAR10,训练集共10000张(每类1000张),测试集5000张(每类500张).当然你也可以选择使用完整版的CIFAR10数据集(需要下载)进行训练.
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms
# mean and std of cifar10 in 3 channels
cifar10_mean = (0.49, 0.48, 0.45)
cifar10_std = (0.25, 0.24, 0.26)
# define transform operations of train dataset
train_transform = transforms.Compose([
# data augmentation
transforms.Pad(4),
transforms.RandomHorizontalFlip(),
transforms.RandomCrop(32),
transforms.ToTensor(),
transforms.Normalize(cifar10_mean, cifar10_std)])
test_transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(cifar10_mean, cifar10_std)])
# mini train Cifar10 datasets: 1000 images each class
train_dataset = torchvision.datasets.ImageFolder(root='./data/path2cifar10/train', transform=train_transform)
# mini test Cifar10 datasets: 500 images each class
test_dataset = torchvision.datasets.ImageFolder(root='./data/path2cifar10/test', transform=test_transform)
"""
torchvision.datasets provide the full version of CIFAR-10 dataset
if you want to train the full version of cifar10 datasets, use codes below instead.
"""
# train_dataset = torchvision.datasets.CIFAR10(root='./data/',
# train=True,
# transform=train_transform,
# download=True)
# test_dataset = torchvision.datasets.CIFAR10(root='./data/',
# train=False,
# transform=test_transform)
# Data loader: provides single- or multi-process iterators over the dataset.
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=100,
shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=100,
shuffle=False)
def fit(model, num_epochs, optimizer, device):
"""
train and evaluate an classifier num_epochs times.
We use optimizer and cross entropy loss to train the model.
Args:
model: CNN network
num_epochs: the number of training epochs
optimizer: optimize the loss function
"""
# loss and optimizer
loss_func = nn.CrossEntropyLoss()
model.to(device)
loss_func.to(device)
# log train loss and test accuracy
losses = []
accs = []
for epoch in range(num_epochs):
print('Epoch {}/{}:'.format(epoch + 1, num_epochs))
# train step
loss = train(model, train_loader, loss_func, optimizer, device)
losses.append(loss)
# evaluate step
accuracy = evaluate(model, test_loader, device)
accs.append(accuracy)
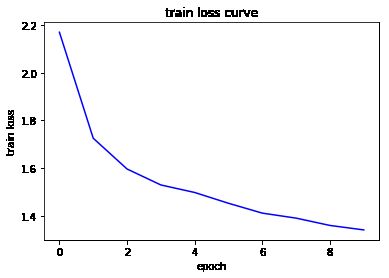
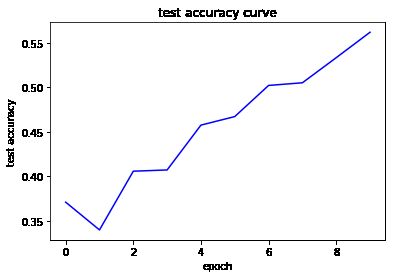
# show curve
show_curve(losses, "train loss")
show_curve(accs, "test accuracy")
# hyper parameters
num_epochs = 10
lr = 0.01
image_size = 32
num_classes = 10
# declare and define an objet of MyCNN
mycnn = MyCNN(image_size, num_classes)
print(mycnn)
MyCNN(
(conv1): Sequential(
(0): Conv2d(3, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(conv2): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Linear(in_features=2048, out_features=10, bias=True)
)
device = torch.device('cuda:0')
optimizer = torch.optim.Adam(mycnn.parameters(), lr=lr)
# start training on cifar10 dataset
fit(mycnn, num_epochs, optimizer, device)
Epoch 1/10:
Step [100/100] Train Loss: 1.6581
Accuracy on Test Set: 37.6000 %
Epoch 2/10:
Step [100/100] Train Loss: 1.7378
Accuracy on Test Set: 46.9800 %
Epoch 3/10:
Step [100/100] Train Loss: 1.6122
Accuracy on Test Set: 46.2200 %
Epoch 4/10:
Step [100/100] Train Loss: 1.5230
Accuracy on Test Set: 47.4600 %
Epoch 5/10:
Step [100/100] Train Loss: 1.5277
Accuracy on Test Set: 50.0800 %
Epoch 6/10:
Step [100/100] Train Loss: 1.3609
Accuracy on Test Set: 49.8200 %
Epoch 7/10:
Step [100/100] Train Loss: 1.3725
Accuracy on Test Set: 52.1400 %
Epoch 8/10:
Step [100/100] Train Loss: 1.0212
Accuracy on Test Set: 53.5800 %
Epoch 9/10:
Step [100/100] Train Loss: 1.4441
Accuracy on Test Set: 53.7800 %
Epoch 10/10:
Step [100/100] Train Loss: 1.2703
Accuracy on Test Set: 55.3200 %

ResNet
接下来,让我们完成更复杂的CNN的实现.
ResNet又叫做残差网络.在ResNet网络结构中会用到两种残差模块,一种是以两个3*3的卷积网络串接在一起作为一个残差模块,另外一种是1*1、3*3、1*1的3个卷积网络串接在一起作为一个残差模块。他们如下图所示。
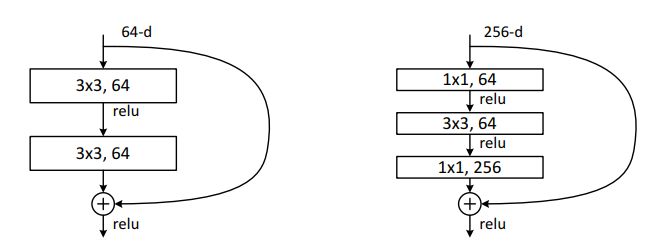
我们以左边的模块为例实现一个ResidualBlock.注意到由于我们在两次卷积中可能会使输入的tensor的size与输出的tensor的size不相等,为了使它们能够相加,所以输出的tensor与输入的tensor size不同时,我们使用downsample(由外部传入)来使保持size相同。注意,下面实现的是模块block,而不是网络
# 3x3 convolution
def conv3x3(in_channels, out_channels, stride=1):
return nn.Conv2d(in_channels, out_channels, kernel_size=3,
stride=stride, padding=1, bias=False)
# Residual block
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1, downsample=None):
super(ResidualBlock, self).__init__()
self.conv1 = conv3x3(in_channels, out_channels, stride)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(out_channels, out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
self.downsample = downsample
def forward(self, x):
"""
Defines the computation performed at every call.
x: N * C * H * W
"""
residual = x
# if the size of input x changes, using downsample to change the size of residual
if self.downsample:
residual = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out += residual
out = self.relu(out)
return out
下面是一份针对cifar10数据集的ResNet的实现.
它先通过一个conv3x3,然后经过3个包含多个残差模块的layer(一个layer可能包括多个ResidualBlock, 由传入的layers列表中的数字决定), 然后经过一个全局平均池化层,最后通过一个线性层.
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=10):
"""
block: ResidualBlock or other block
layers: a list with 3 positive num.
"""
super(ResNet, self).__init__()
self.in_channels = 16
self.conv = conv3x3(3, 16)
self.bn = nn.BatchNorm2d(16)
self.relu = nn.ReLU(inplace=True)
# layer1: image size 32
self.layer1 = self.make_layer(block, 16, num_blocks=layers[0])
# layer2: image size 32 -> 16
self.layer2 = self.make_layer(block, 32, num_blocks=layers[1], stride=2)
# layer1: image size 16 -> 8
self.layer3 = self.make_layer(block, 64, num_blocks=layers[2], stride=2)
# global avg pool: image size 8 -> 1
self.avg_pool = nn.AvgPool2d(8)
self.fc = nn.Linear(64, num_classes)
def make_layer(self, block, out_channels, num_blocks, stride=1):
"""
make a layer with num_blocks blocks.
"""
downsample = None
if (stride != 1) or (self.in_channels != out_channels):
# use Conv2d with stride to downsample
downsample = nn.Sequential(
conv3x3(self.in_channels, out_channels, stride=stride),
nn.BatchNorm2d(out_channels))
# first block with downsample
layers = []
layers.append(block(self.in_channels, out_channels, stride, downsample))
self.in_channels = out_channels
# add num_blocks - 1 blocks
for i in range(1, num_blocks):
layers.append(block(out_channels, out_channels))
# return a layer containing layers
return nn.Sequential(*layers)
def forward(self, x):
out = self.conv(x)
out = self.bn(out)
out = self.relu(out)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.avg_pool(out)
# view: here change output size from 4 dimensions to 2 dimensions
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
resnet = ResNet(ResidualBlock, [2, 2, 2])
print(resnet)
ResNet(
(conv): Conv2d(3, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(layer1): Sequential(
(0): ResidualBlock(
(conv1): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): ResidualBlock(
(conv1): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): ResidualBlock(
(conv1): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResidualBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): ResidualBlock(
(conv1): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResidualBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avg_pool): AvgPool2d(kernel_size=8, stride=8, padding=0)
(fc): Linear(in_features=64, out_features=10, bias=True)
)
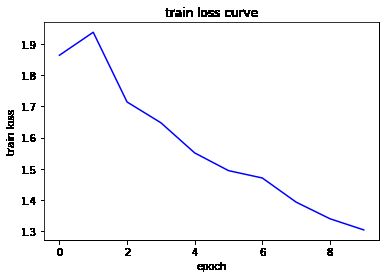
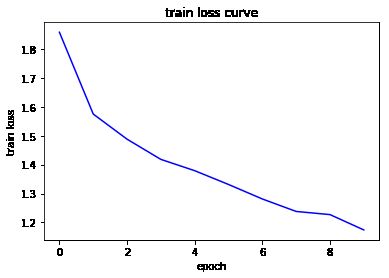
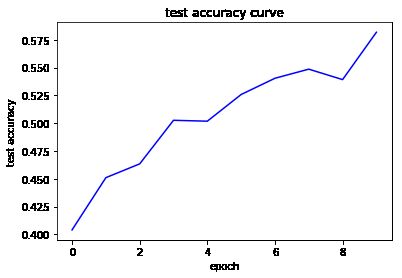
使用fit函数训练实现的ResNet,观察结果变化.
# Hyper-parameters
num_epochs = 10
lr = 0.001
# Device configuration
device = torch.device('cuda:0')
# optimizer
optimizer = torch.optim.Adam(resnet.parameters(), lr=lr)
fit(resnet, num_epochs, optimizer, device)
Epoch 1/10:
Step [100/100] Train Loss: 1.6432
Accuracy on Test Set: 30.9000 %
Epoch 2/10:
Step [100/100] Train Loss: 1.6767
Accuracy on Test Set: 36.5400 %
Epoch 3/10:
Step [100/100] Train Loss: 1.5952
Accuracy on Test Set: 41.1800 %
Epoch 4/10:
Step [100/100] Train Loss: 1.5832
Accuracy on Test Set: 40.4000 %
Epoch 5/10:
Step [100/100] Train Loss: 1.4926
Accuracy on Test Set: 43.3400 %
Epoch 6/10:
Step [100/100] Train Loss: 1.4055
Accuracy on Test Set: 47.0200 %
Epoch 7/10:
Step [100/100] Train Loss: 1.4487
Accuracy on Test Set: 48.7200 %
Epoch 8/10:
Step [100/100] Train Loss: 1.3479
Accuracy on Test Set: 51.2200 %
Epoch 9/10:
Step [100/100] Train Loss: 1.2843
Accuracy on Test Set: 53.6600 %
Epoch 10/10:
Step [100/100] Train Loss: 1.3824
Accuracy on Test Set: 51.4200 %

改变学习率
尝试改变学习率lr,使用SGD或Adam优化器,训练10个epoch,提高ResNet在测试集上的accuracy.
# Hyper-parameters
num_epochs = 10
lr = 0.002
# Device configuration
device = torch.device('cpu')
# optimizer
optimizer = torch.optim.Adam(resnet.parameters(), lr=lr)
fit(resnet, num_epochs, optimizer, device)
Epoch 1/10:
Step [100/100] Train Loss: 1.5980
Accuracy on Test Set: 40.4000 %
Epoch 2/10:
Step [100/100] Train Loss: 1.5078
Accuracy on Test Set: 45.1000 %
Epoch 3/10:
Step [100/100] Train Loss: 1.5211
Accuracy on Test Set: 46.3400 %
Epoch 4/10:
Step [100/100] Train Loss: 1.4474
Accuracy on Test Set: 50.2600 %
Epoch 5/10:
Step [100/100] Train Loss: 1.4744
Accuracy on Test Set: 50.1800 %
Epoch 6/10:
Step [100/100] Train Loss: 1.2845
Accuracy on Test Set: 52.5800 %
Epoch 7/10:
Step [100/100] Train Loss: 1.1375
Accuracy on Test Set: 54.0400 %
Epoch 8/10:
Step [100/100] Train Loss: 1.1012
Accuracy on Test Set: 54.8600 %
Epoch 9/10:
Step [100/100] Train Loss: 1.1405
Accuracy on Test Set: 53.9200 %
Epoch 10/10:
Step [100/100] Train Loss: 1.1964
Accuracy on Test Set: 58.1800 %
将学习率提高之后,有效提高了最终的准确率。
SE
下图表示将SE模块嵌入到ResNet的残差模块.
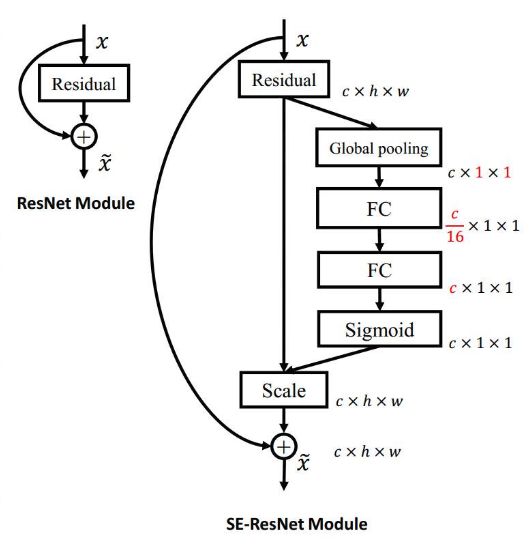
其中,global pooling表示全局池化层(将输入的size池化为1*1), 将c*h*w的输入变为c*1*1的输出.FC表示全连接层(线性层),两层FC之间使用ReLU作为激活函数.通过两层FC后使用sigmoid激活函数激活.最后将得到的c个值与原输入c*h*w按channel相乘,得到c*h*w的输出.
补充下方的代码完成SE-Resnet block的实现.
from torch import nn
class SELayer(nn.Module):
def __init__(self, channel, reduction=16):
super(SELayer, self).__init__()
# The output of AdaptiveAvgPool2d is of size H x W, for any input size.
self.avg_pool = nn.AdaptiveAvgPool2d((1, 1))
self.relu = nn.ReLU(inplace=True)
self.FC1 = nn.Linear(channel, channel//reduction)
self.FC2 = nn.Linear(channel//reduction, channel)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# print("b0", x.shape)
out = self.avg_pool(x)
# print('why???', out.shape)
out = out.view(x.size(0),-1)
# print("b1", out.shape)
out = self.FC1(out)
# print("a2", out.shape)
out = self.relu(out)
# print("a3", out.shape)
out = self.FC2(out)
# print("a4", out.shape)
out = self.sigmoid(out)
return out.view(out.size(0), out.size(1), 1,1)*x
class SEResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1, downsample=None, reduction=16):
super(SEResidualBlock, self).__init__()
self.conv1 = conv3x3(in_channels, out_channels, stride)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(out_channels, out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
self.se = SELayer(out_channels, reduction)
self.downsample = downsample
def forward(self, x):
residual = x
# if the size of input x changes, using downsample to change the size of residual
if self.downsample:
residual = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
# size = out.size(1)
s = self.se(out)
# for i in range(size):
# print(out[:,i,:,:].shape)
# print(s.shape)
# print('hhh', i)
# out[:,i,:,:] = out[:,i,:,:]*s[0,i]
out += residual
out = self.relu(out)
return out
se_resnet = ResNet(SEResidualBlock, [2, 2, 2])
print(se_resnet)
ResNet(
(conv): Conv2d(3, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(layer1): Sequential(
(0): SEResidualBlock(
(conv1): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(se): SELayer(
(avg_pool): AdaptiveAvgPool2d(output_size=(1, 1))
(relu): ReLU(inplace)
(FC1): Linear(in_features=16, out_features=1, bias=True)
(FC2): Linear(in_features=1, out_features=16, bias=True)
(sigmoid): Sigmoid()
)
)
(1): SEResidualBlock(
(conv1): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(se): SELayer(
(avg_pool): AdaptiveAvgPool2d(output_size=(1, 1))
(relu): ReLU(inplace)
(FC1): Linear(in_features=16, out_features=1, bias=True)
(FC2): Linear(in_features=1, out_features=16, bias=True)
(sigmoid): Sigmoid()
)
)
)
(layer2): Sequential(
(0): SEResidualBlock(
(conv1): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(se): SELayer(
(avg_pool): AdaptiveAvgPool2d(output_size=(1, 1))
(relu): ReLU(inplace)
(FC1): Linear(in_features=32, out_features=2, bias=True)
(FC2): Linear(in_features=2, out_features=32, bias=True)
(sigmoid): Sigmoid()
)
(downsample): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): SEResidualBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(se): SELayer(
(avg_pool): AdaptiveAvgPool2d(output_size=(1, 1))
(relu): ReLU(inplace)
(FC1): Linear(in_features=32, out_features=2, bias=True)
(FC2): Linear(in_features=2, out_features=32, bias=True)
(sigmoid): Sigmoid()
)
)
)
(layer3): Sequential(
(0): SEResidualBlock(
(conv1): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(se): SELayer(
(avg_pool): AdaptiveAvgPool2d(output_size=(1, 1))
(relu): ReLU(inplace)
(FC1): Linear(in_features=64, out_features=4, bias=True)
(FC2): Linear(in_features=4, out_features=64, bias=True)
(sigmoid): Sigmoid()
)
(downsample): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): SEResidualBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(se): SELayer(
(avg_pool): AdaptiveAvgPool2d(output_size=(1, 1))
(relu): ReLU(inplace)
(FC1): Linear(in_features=64, out_features=4, bias=True)
(FC2): Linear(in_features=4, out_features=64, bias=True)
(sigmoid): Sigmoid()
)
)
)
(avg_pool): AvgPool2d(kernel_size=8, stride=8, padding=0)
(fc): Linear(in_features=64, out_features=10, bias=True)
)
# Hyper-parameters
num_epochs = 10
lr = 0.001
# Device configuration
device = torch.device('cpu')
# optimizer
optimizer = torch.optim.Adam(se_resnet.parameters(), lr=lr)
fit(se_resnet, num_epochs, optimizer, device)
Epoch 1/10:
Step [100/100] Train Loss: 1.7405
Accuracy on Test Set: 37.0800 %
Epoch 2/10:
Step [100/100] Train Loss: 1.6847
Accuracy on Test Set: 33.9600 %
Epoch 3/10:
Step [100/100] Train Loss: 1.7407
Accuracy on Test Set: 40.5600 %
Epoch 4/10:
Step [100/100] Train Loss: 1.6063
Accuracy on Test Set: 40.7000 %
Epoch 5/10:
Step [100/100] Train Loss: 1.4484
Accuracy on Test Set: 45.7400 %
Epoch 6/10:
Step [100/100] Train Loss: 1.3516
Accuracy on Test Set: 46.7000 %
Epoch 7/10:
Step [100/100] Train Loss: 1.3947
Accuracy on Test Set: 50.2000 %
Epoch 8/10:
Step [100/100] Train Loss: 1.2660
Accuracy on Test Set: 50.5000 %
Epoch 9/10:
Step [100/100] Train Loss: 1.3348
Accuracy on Test Set: 53.3200 %
Epoch 10/10:
Step [100/100] Train Loss: 1.2646
Accuracy on Test Set: 56.1800 %

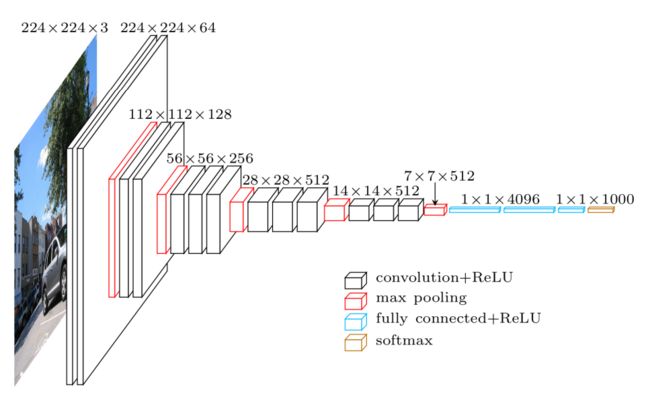
Vgg
接下来让我们阅读vgg网络的实现代码.VGGNet全部使用3*3的卷积核和2*2的池化核,通过不断加深网络结构来提升性能。Vgg表明了卷积神经网络的深度增加和小卷积核的使用对网络的最终分类识别效果有很大的作用.
import math
class VGG(nn.Module):
def __init__(self, cfg):
super(VGG, self).__init__()
self.features = self._make_layers(cfg)
# linear layer
self.classifier = nn.Linear(512, 10)
def forward(self, x):
out = self.features(x)
out = out.view(out.size(0), -1)
out = self.classifier(out)
return out
def _make_layers(self, cfg):
"""
cfg: a list define layers this layer contains
'M': MaxPool, number: Conv2d(out_channels=number) -> BN -> ReLU
"""
layers = []
in_channels = 3
for x in cfg:
if x == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
layers += [nn.Conv2d(in_channels, x, kernel_size=3, padding=1),
nn.BatchNorm2d(x),
nn.ReLU(inplace=True)]
in_channels = x
layers += [nn.AvgPool2d(kernel_size=1, stride=1)]
return nn.Sequential(*layers)
cfg = {
'VGG11': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'VGG13': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'VGG16': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
'VGG19': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'],
}
vggnet = VGG(cfg['VGG11'])
print(vggnet)
# Hyper-parameters
num_epochs = 10
lr = 1e-3
# Device configuration
device = torch.device('cuda:0')
# optimizer
optimizer = torch.optim.Adam(vggnet.parameters(), lr=lr)
fit(vggnet, num_epochs, optimizer, device)
Epoch 1/10:
Step [100/100] Train Loss: 1.5439
Accuracy on Test Set: 37.3400 %
Epoch 2/10:
Step [100/100] Train Loss: 1.6143
Accuracy on Test Set: 40.8400 %
Epoch 3/10:
Step [100/100] Train Loss: 1.4371
Accuracy on Test Set: 49.6200 %
Epoch 4/10:
Step [100/100] Train Loss: 1.2519
Accuracy on Test Set: 51.2400 %
Epoch 5/10:
Step [100/100] Train Loss: 1.2273
Accuracy on Test Set: 54.7400 %
Epoch 6/10:
Step [100/100] Train Loss: 1.2199
Accuracy on Test Set: 56.6200 %
Epoch 7/10:
Step [100/100] Train Loss: 1.2575
Accuracy on Test Set: 58.1600 %
Epoch 8/10:
Step [100/100] Train Loss: 1.0279
Accuracy on Test Set: 60.1000 %
Epoch 9/10:
Step [100/100] Train Loss: 0.9669
Accuracy on Test Set: 61.9000 %
Epoch 10/10:
Step [100/100] Train Loss: 1.0823
Accuracy on Test Set: 64.2000 %