OpenCV进行图像相似度对比的几种办法:PSNR/感知哈希/计算特征点
本文转载自:OpenCV进行图像相似度对比的几种办法
一、PSNR峰值信噪比
PSNR(Peak Signal to Noise Ratio),一种全参考的图像质量评价指标。
原理简介
https://en.wikipedia.org/wiki/Peak_signal-to-noise_ratio
PSNR是最普遍和使用最为广泛的一种图像客观评价指标,然而它是基于对应像素点间的误差,即基于误差敏感的图像质量评价。由于并未考虑到人眼的视觉特性(人眼对空间频率较低的对比差异敏感度较高,人眼对亮度对比差异的敏感度较色度高,人眼对一个区域的感知结果会受到其周围邻近区域的影响等),因而经常出现评价结果与人的主观感觉不一致的情况。
SSIM(structural similarity)结构相似性,也是一种全参考的图像质量评价指标,它分别从亮度、对比度、结构三方面度量图像相似性。
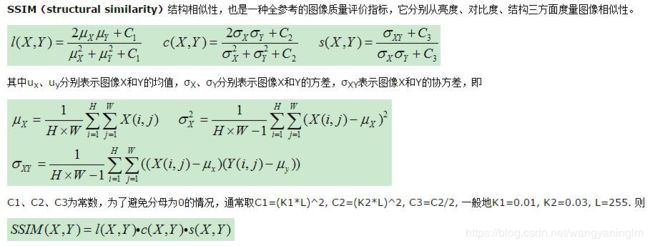
SSIM取值范围[0,1],值越大,表示图像失真越小.
在实际应用中,可以利用滑动窗将图像分块,令分块总数为N,考虑到窗口形状对分块的影响,采用高斯加权计算每一窗口的均值、方差以及协方差,然后计算对应块的结构相似度SSIM,最后将平均值作为两图像的结构相似性度量,即平均结构相似性MSSIM:
参考资料
[1] 峰值信噪比-维基百科
[2] 王宇庆,刘维亚,王勇. 一种基于局部方差和结构相似度的图像质量评价方法[J]. 光电子激光,2008。
[3]http://www.cnblogs.com/vincent2012/archive/2012/10/13/2723152.html
官方文档的说明,不过是GPU版本的,我们可以修改不用gpu不然还得重新编译
http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/highgui/video-input-psnr-ssim/video-input-psnr-ssim.html#videoinputpsnrmssim
http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/gpu/gpu-basics-similarity/gpu-basics-similarity.html?highlight=psnr
代码
// PSNR.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include // Console I/O
#include // String to number conversion
#include // Basic OpenCV structures
#include // Image processing methods for the CPU
#include // Read images
#include // GPU structures and methods
using namespace std;
using namespace cv;
double getPSNR(const Mat& I1, const Mat& I2); // CPU versions
Scalar getMSSIM( const Mat& I1, const Mat& I2);
double getPSNR_GPU(const Mat& I1, const Mat& I2); // Basic GPU versions
Scalar getMSSIM_GPU( const Mat& I1, const Mat& I2);
struct BufferPSNR // Optimized GPU versions
{ // Data allocations are very expensive on GPU. Use a buffer to solve: allocate once reuse later.
gpu::GpuMat gI1, gI2, gs, t1,t2;
gpu::GpuMat buf;
};
double getPSNR_GPU_optimized(const Mat& I1, const Mat& I2, BufferPSNR& b);
struct BufferMSSIM // Optimized GPU versions
{ // Data allocations are very expensive on GPU. Use a buffer to solve: allocate once reuse later.
gpu::GpuMat gI1, gI2, gs, t1,t2;
gpu::GpuMat I1_2, I2_2, I1_I2;
vector vI1, vI2;
gpu::GpuMat mu1, mu2;
gpu::GpuMat mu1_2, mu2_2, mu1_mu2;
gpu::GpuMat sigma1_2, sigma2_2, sigma12;
gpu::GpuMat t3;
gpu::GpuMat ssim_map;
gpu::GpuMat buf;
};
Scalar getMSSIM_GPU_optimized( const Mat& i1, const Mat& i2, BufferMSSIM& b);
void help()
{
cout
<< "\n--------------------------------------------------------------------------" << endl
<< "This program shows how to port your CPU code to GPU or write that from scratch." << endl
<< "You can see the performance improvement for the similarity check methods (PSNR and SSIM)." << endl
<< "Usage:" << endl
<< "./gpu-basics-similarity referenceImage comparedImage numberOfTimesToRunTest(like 10)." << endl
<< "--------------------------------------------------------------------------" << endl
<< endl;
}
int main(int argc, char *argv[])
{
help();
Mat I1 = imread("swan1.jpg",1); // Read the two images
Mat I2 = imread("swan2.jpg",1);
if (!I1.data || !I2.data) // Check for success
{
cout << "Couldn't read the image";
return 0;
}
BufferPSNR bufferPSNR;
BufferMSSIM bufferMSSIM;
int TIMES;
stringstream sstr("500");
sstr >> TIMES;
double time, result;
//------------------------------- PSNR CPU ----------------------------------------------------
time = (double)getTickCount();
for (int i = 0; i < TIMES; ++i)
result = getPSNR(I1,I2);
time = 1000*((double)getTickCount() - time)/getTickFrequency();
time /= TIMES;
cout << "Time of PSNR CPU (averaged for " << TIMES << " runs): " << time << " milliseconds."
<< " With result of: " << result << endl;
////------------------------------- PSNR GPU ----------------------------------------------------
//time = (double)getTickCount();
//for (int i = 0; i < TIMES; ++i)
// result = getPSNR_GPU(I1,I2);
//time = 1000*((double)getTickCount() - time)/getTickFrequency();
//time /= TIMES;
//cout << "Time of PSNR GPU (averaged for " << TIMES << " runs): " << time << " milliseconds."
// << " With result of: " << result << endl;
/*
//------------------------------- PSNR GPU Optimized--------------------------------------------
time = (double)getTickCount(); // Initial call
result = getPSNR_GPU_optimized(I1, I2, bufferPSNR);
time = 1000*((double)getTickCount() - time)/getTickFrequency();
cout << "Initial call GPU optimized: " << time <<" milliseconds."
<< " With result of: " << result << endl;
time = (double)getTickCount();
for (int i = 0; i < TIMES; ++i)
result = getPSNR_GPU_optimized(I1, I2, bufferPSNR);
time = 1000*((double)getTickCount() - time)/getTickFrequency();
time /= TIMES;
cout << "Time of PSNR GPU OPTIMIZED ( / " << TIMES << " runs): " << time
<< " milliseconds." << " With result of: " << result << endl << endl;
//------------------------------- SSIM CPU -----------------------------------------------------
Scalar x;
time = (double)getTickCount();
for (int i = 0; i < TIMES; ++i)
x = getMSSIM(I1,I2);
time = 1000*((double)getTickCount() - time)/getTickFrequency();
time /= TIMES;
cout << "Time of MSSIM CPU (averaged for " << TIMES << " runs): " << time << " milliseconds."
<< " With result of B" << x.val[0] << " G" << x.val[1] << " R" << x.val[2] << endl;
//------------------------------- SSIM GPU -----------------------------------------------------
time = (double)getTickCount();
for (int i = 0; i < TIMES; ++i)
x = getMSSIM_GPU(I1,I2);
time = 1000*((double)getTickCount() - time)/getTickFrequency();
time /= TIMES;
cout << "Time of MSSIM GPU (averaged for " << TIMES << " runs): " << time << " milliseconds."
<< " With result of B" << x.val[0] << " G" << x.val[1] << " R" << x.val[2] << endl;
//------------------------------- SSIM GPU Optimized--------------------------------------------
time = (double)getTickCount();
x = getMSSIM_GPU_optimized(I1,I2, bufferMSSIM);
time = 1000*((double)getTickCount() - time)/getTickFrequency();
cout << "Time of MSSIM GPU Initial Call " << time << " milliseconds."
<< " With result of B" << x.val[0] << " G" << x.val[1] << " R" << x.val[2] << endl;
time = (double)getTickCount();
for (int i = 0; i < TIMES; ++i)
x = getMSSIM_GPU_optimized(I1,I2, bufferMSSIM);
time = 1000*((double)getTickCount() - time)/getTickFrequency();
time /= TIMES;
cout << "Time of MSSIM GPU OPTIMIZED ( / " << TIMES << " runs): " << time << " milliseconds."
<< " With result of B" << x.val[0] << " G" << x.val[1] << " R" << x.val[2] << endl << endl;
return 0;
*/
getchar();
}
double getPSNR(const Mat& I1, const Mat& I2)
{
Mat s1;
absdiff(I1, I2, s1); // |I1 - I2|
s1.convertTo(s1, CV_32F); // cannot make a square on 8 bits
s1 = s1.mul(s1); // |I1 - I2|^2
Scalar s = sum(s1); // sum elements per channel
double sse = s.val[0] + s.val[1] + s.val[2]; // sum channels
if( sse <= 1e-10) // for small values return zero
return 0;
else
{
double mse =sse /(double)(I1.channels() * I1.total());
double psnr = 10.0*log10((255*255)/mse);
return psnr;
}
}
double getPSNR_GPU_optimized(const Mat& I1, const Mat& I2, BufferPSNR& b)
{
b.gI1.upload(I1);
b.gI2.upload(I2);
b.gI1.convertTo(b.t1, CV_32F);
b.gI2.convertTo(b.t2, CV_32F);
gpu::absdiff(b.t1.reshape(1), b.t2.reshape(1), b.gs);
gpu::multiply(b.gs, b.gs, b.gs);
double sse = gpu::sum(b.gs, b.buf)[0];
if( sse <= 1e-10) // for small values return zero
return 0;
else
{
double mse = sse /(double)(I1.channels() * I1.total());
double psnr = 10.0*log10((255*255)/mse);
return psnr;
}
}
double getPSNR_GPU(const Mat& I1, const Mat& I2)
{
gpu::GpuMat gI1, gI2, gs, t1,t2;
gI1.upload(I1);
gI2.upload(I2);
gI1.convertTo(t1, CV_32F);
gI2.convertTo(t2, CV_32F);
gpu::absdiff(t1.reshape(1), t2.reshape(1), gs);
gpu::multiply(gs, gs, gs);
Scalar s = gpu::sum(gs);
double sse = s.val[0] + s.val[1] + s.val[2];
if( sse <= 1e-10) // for small values return zero
return 0;
else
{
double mse =sse /(double)(gI1.channels() * I1.total());
double psnr = 10.0*log10((255*255)/mse);
return psnr;
}
}
Scalar getMSSIM( const Mat& i1, const Mat& i2)
{
const double C1 = 6.5025, C2 = 58.5225;
/***************************** INITS **********************************/
int d = CV_32F;
Mat I1, I2;
i1.convertTo(I1, d); // cannot calculate on one byte large values
i2.convertTo(I2, d);
Mat I2_2 = I2.mul(I2); // I2^2
Mat I1_2 = I1.mul(I1); // I1^2
Mat I1_I2 = I1.mul(I2); // I1 * I2
/*************************** END INITS **********************************/
Mat mu1, mu2; // PRELIMINARY COMPUTING
GaussianBlur(I1, mu1, Size(11, 11), 1.5);
GaussianBlur(I2, mu2, Size(11, 11), 1.5);
Mat mu1_2 = mu1.mul(mu1);
Mat mu2_2 = mu2.mul(mu2);
Mat mu1_mu2 = mu1.mul(mu2);
Mat sigma1_2, sigma2_2, sigma12;
GaussianBlur(I1_2, sigma1_2, Size(11, 11), 1.5);
sigma1_2 -= mu1_2;
GaussianBlur(I2_2, sigma2_2, Size(11, 11), 1.5);
sigma2_2 -= mu2_2;
GaussianBlur(I1_I2, sigma12, Size(11, 11), 1.5);
sigma12 -= mu1_mu2;
///////////////////////////////// FORMULA ////////////////////////////////
Mat t1, t2, t3;
t1 = 2 * mu1_mu2 + C1;
t2 = 2 * sigma12 + C2;
t3 = t1.mul(t2); // t3 = ((2*mu1_mu2 + C1).*(2*sigma12 + C2))
t1 = mu1_2 + mu2_2 + C1;
t2 = sigma1_2 + sigma2_2 + C2;
t1 = t1.mul(t2); // t1 =((mu1_2 + mu2_2 + C1).*(sigma1_2 + sigma2_2 + C2))
Mat ssim_map;
divide(t3, t1, ssim_map); // ssim_map = t3./t1;
Scalar mssim = mean( ssim_map ); // mssim = average of ssim map
return mssim;
}
Scalar getMSSIM_GPU( const Mat& i1, const Mat& i2)
{
const float C1 = 6.5025f, C2 = 58.5225f;
/***************************** INITS **********************************/
gpu::GpuMat gI1, gI2, gs1, t1,t2;
gI1.upload(i1);
gI2.upload(i2);
gI1.convertTo(t1, CV_MAKE_TYPE(CV_32F, gI1.channels()));
gI2.convertTo(t2, CV_MAKE_TYPE(CV_32F, gI2.channels()));
vector vI1, vI2;
gpu::split(t1, vI1);
gpu::split(t2, vI2);
Scalar mssim;
for( int i = 0; i < gI1.channels(); ++i )
{
gpu::GpuMat I2_2, I1_2, I1_I2;
gpu::multiply(vI2[i], vI2[i], I2_2); // I2^2
gpu::multiply(vI1[i], vI1[i], I1_2); // I1^2
gpu::multiply(vI1[i], vI2[i], I1_I2); // I1 * I2
/*************************** END INITS **********************************/
gpu::GpuMat mu1, mu2; // PRELIMINARY COMPUTING
gpu::GaussianBlur(vI1[i], mu1, Size(11, 11), 1.5);
gpu::GaussianBlur(vI2[i], mu2, Size(11, 11), 1.5);
gpu::GpuMat mu1_2, mu2_2, mu1_mu2;
gpu::multiply(mu1, mu1, mu1_2);
gpu::multiply(mu2, mu2, mu2_2);
gpu::multiply(mu1, mu2, mu1_mu2);
gpu::GpuMat sigma1_2, sigma2_2, sigma12;
gpu::GaussianBlur(I1_2, sigma1_2, Size(11, 11), 1.5);
//sigma1_2 = sigma1_2 - mu1_2;
gpu::subtract(sigma1_2,mu1_2,sigma1_2);
gpu::GaussianBlur(I2_2, sigma2_2, Size(11, 11), 1.5);
//sigma2_2 = sigma2_2 - mu2_2;
gpu::GaussianBlur(I1_I2, sigma12, Size(11, 11), 1.5);
(Mat)sigma12 =(Mat)sigma12 - (Mat)mu1_mu2;
//sigma12 = sigma12 - mu1_mu2
///////////////////////////////// FORMULA ////////////////////////////////
gpu::GpuMat t1, t2, t3;
// t1 = 2 * mu1_mu2 + C1;
// t2 = 2 * sigma12 + C2;
// gpu::multiply(t1, t2, t3); // t3 = ((2*mu1_mu2 + C1).*(2*sigma12 + C2))
//
// t1 = mu1_2 + mu2_2 + C1;
// t2 = sigma1_2 + sigma2_2 + C2;
// gpu::multiply(t1, t2, t1); // t1 =((mu1_2 + mu2_2 + C1).*(sigma1_2 + sigma2_2 + C2))
gpu::GpuMat ssim_map;
gpu::divide(t3, t1, ssim_map); // ssim_map = t3./t1;
Scalar s = gpu::sum(ssim_map);
mssim.val[i] = s.val[0] / (ssim_map.rows * ssim_map.cols);
}
return mssim;
}
Scalar getMSSIM_GPU_optimized( const Mat& i1, const Mat& i2, BufferMSSIM& b)
{
int cn = i1.channels();
const float C1 = 6.5025f, C2 = 58.5225f;
/***************************** INITS **********************************/
b.gI1.upload(i1);
b.gI2.upload(i2);
gpu::Stream stream;
stream.enqueueConvert(b.gI1, b.t1, CV_32F);
stream.enqueueConvert(b.gI2, b.t2, CV_32F);
gpu::split(b.t1, b.vI1, stream);
gpu::split(b.t2, b.vI2, stream);
Scalar mssim;
for( int i = 0; i < b.gI1.channels(); ++i )
{
gpu::multiply(b.vI2[i], b.vI2[i], b.I2_2, stream); // I2^2
gpu::multiply(b.vI1[i], b.vI1[i], b.I1_2, stream); // I1^2
gpu::multiply(b.vI1[i], b.vI2[i], b.I1_I2, stream); // I1 * I2
//gpu::GaussianBlur(b.vI1[i], b.mu1, Size(11, 11), 1.5, 0, BORDER_DEFAULT, -1, stream);
//gpu::GaussianBlur(b.vI2[i], b.mu2, Size(11, 11), 1.5, 0, BORDER_DEFAULT, -1, stream);
gpu::multiply(b.mu1, b.mu1, b.mu1_2, stream);
gpu::multiply(b.mu2, b.mu2, b.mu2_2, stream);
gpu::multiply(b.mu1, b.mu2, b.mu1_mu2, stream);
//gpu::GaussianBlur(b.I1_2, b.sigma1_2, Size(11, 11), 1.5, 0, BORDER_DEFAULT, -1, stream);
//gpu::subtract(b.sigma1_2, b.mu1_2, b.sigma1_2, stream);
//b.sigma1_2 -= b.mu1_2; - This would result in an extra data transfer operation
//gpu::GaussianBlur(b.I2_2, b.sigma2_2, Size(11, 11), 1.5, 0, BORDER_DEFAULT, -1, stream);
//gpu::subtract(b.sigma2_2, b.mu2_2, b.sigma2_2, stream);
//b.sigma2_2 -= b.mu2_2;
//gpu::GaussianBlur(b.I1_I2, b.sigma12, Size(11, 11), 1.5, 0, BORDER_DEFAULT, -1, stream);
//gpu::subtract(b.sigma12, b.mu1_mu2, b.sigma12, stream);
//b.sigma12 -= b.mu1_mu2;
//here too it would be an extra data transfer due to call of operator*(Scalar, Mat)
gpu::multiply(b.mu1_mu2, 2, b.t1, stream); //b.t1 = 2 * b.mu1_mu2 + C1;
//gpu::add(b.t1, C1, b.t1, stream);
gpu::multiply(b.sigma12, 2, b.t2, stream); //b.t2 = 2 * b.sigma12 + C2;
//gpu::add(b.t2, C2, b.t2, stream);
gpu::multiply(b.t1, b.t2, b.t3, stream); // t3 = ((2*mu1_mu2 + C1).*(2*sigma12 + C2))
//gpu::add(b.mu1_2, b.mu2_2, b.t1, stream);
//gpu::add(b.t1, C1, b.t1, stream);
//gpu::add(b.sigma1_2, b.sigma2_2, b.t2, stream);
//gpu::add(b.t2, C2, b.t2, stream);
gpu::multiply(b.t1, b.t2, b.t1, stream); // t1 =((mu1_2 + mu2_2 + C1).*(sigma1_2 + sigma2_2 + C2))
gpu::divide(b.t3, b.t1, b.ssim_map, stream); // ssim_map = t3./t1;
stream.waitForCompletion();
Scalar s = gpu::sum(b.ssim_map, b.buf);
mssim.val[i] = s.val[0] / (b.ssim_map.rows * b.ssim_map.cols);
}
return mssim;
}
Keneyr(本博主):我没有GPU,纯用CPU算的,简化后的代码如下:
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
double getPSNR(const Mat& I1, const Mat& I2);
Scalar getMSSIM(const Mat& I1, const Mat& I2);
int main()
{
Mat I1 = imread("");
Mat I2 = imread("");
if (!I1.data || !I2.data) {
cout << "Couldn't read the image";
return 0;
}
int TIMES;
stringstream sstr("500");
sstr >> TIMES;
double time, result;
//-----------------------------------PSNR CPU-------------------------------------------
time = (double)getTickCount();
for (int i = 0; i < TIMES; ++i)
result = getPSNR(I1, I2);
time = 1000 * ((double)getTickCount() - time) / getTickFrequency();
time /= TIMES;
cout<<"---------------------------------PSNR--------------------------------" << endl;
cout << "Time of PSNR CPU (averaged for " << TIMES << " runs): " << time << " milliseconds." << " With result of: " << result << endl;
//-----------------------------------SSIM CPU-------------------------------------------
cout << "---------------------------------SSIM--------------------------------" << endl;
Scalar x;
x = getMSSIM(I1, I2);
cout << x.val[0] << " " << x.val[1] << " " << x.val[2] << endl;
system("pause");
}
double getPSNR(const Mat& I1, const Mat& I2)
{
Mat s1;
absdiff(I1, I2, s1); //|I1-I2|
s1.convertTo(s1, CV_32F); //cannot make a square on 8 bits
s1 = s1.mul(s1); //|I1-I2|^2
/*imshow("s1", s1);
waitKey(0);*/
Scalar s = sum(s1);
double sse = s.val[0] + s.val[1] + s.val[2]; //sum channels
if (sse <= 1e-10) //for small values return zero
return 0;
else {
double mse = sse / (double)(I1.channels()*I1.total());
double psnr = 10.0*log10((255 * 255) / mse);
return psnr;
}
}
Scalar getMSSIM(const Mat& i1, const Mat& i2)
{
const double C1 = 6.5025, C2 = 58.5225;
/***************************** INITS **********************************/
int d = CV_32F;
Mat I1, I2;
i1.convertTo(I1, d); // cannot calculate on one byte large values
i2.convertTo(I2, d);
Mat I2_2 = I2.mul(I2); // I2^2
Mat I1_2 = I1.mul(I1); // I1^2
Mat I1_I2 = I1.mul(I2); // I1 * I2
/*************************** END INITS **********************************/
Mat mu1, mu2; // PRELIMINARY COMPUTING
GaussianBlur(I1, mu1, Size(11, 11), 1.5);
GaussianBlur(I2, mu2, Size(11, 11), 1.5);
Mat mu1_2 = mu1.mul(mu1);
Mat mu2_2 = mu2.mul(mu2);
Mat mu1_mu2 = mu1.mul(mu2);
Mat sigma1_2, sigma2_2, sigma12;
GaussianBlur(I1_2, sigma1_2, Size(11, 11), 1.5);
sigma1_2 -= mu1_2;
GaussianBlur(I2_2, sigma2_2, Size(11, 11), 1.5);
sigma2_2 -= mu2_2;
GaussianBlur(I1_I2, sigma12, Size(11, 11), 1.5);
sigma12 -= mu1_mu2;
///////////////////////////////// FORMULA ////////////////////////////////
Mat t1, t2, t3;
t1 = 2 * mu1_mu2 + C1;
t2 = 2 * sigma12 + C2;
t3 = t1.mul(t2); // t3 = ((2*mu1_mu2 + C1).*(2*sigma12 + C2))
t1 = mu1_2 + mu2_2 + C1;
t2 = sigma1_2 + sigma2_2 + C2;
t1 = t1.mul(t2); // t1 =((mu1_2 + mu2_2 + C1).*(sigma1_2 + sigma2_2 + C2))
Mat ssim_map;
divide(t3, t1, ssim_map); // ssim_map = t3./t1;
Scalar mssim = mean(ssim_map); // mssim = average of ssim map
return mssim;
}
结果是这样的:

对于SSIM来说,值越大,表示图像越相近。
对于PSNR来说,值越小,表示图像越相近。
2.感知哈希算法
(perceptual hash algorithm)
实现步骤:
1. 缩小尺寸:将图像缩小到8*8的尺寸,总共64个像素。这一步的作用是去除图像的细节,只保留结构/明暗等基本信息,摒弃不同尺寸/比例带来的图像差异;
2. 简化色彩:将缩小后的图像,转为64级灰度,即所有像素点总共只有64种颜色;
3. 计算平均值:计算所有64个像素的灰度平均值;
4. 比较像素的灰度:将每个像素的灰度,与平均值进行比较,大于或等于平均值记为1,小于平均值记为0;
5. 计算哈希值:将上一步的比较结果,组合在一起,就构成了一个64位的整数,这就是这张图像的指纹。组合的次序并不重要,只要保证所有图像都采用同样次序就行了;
6. 得到指纹以后,就可以对比不同的图像,看看64位中有多少位是不一样的。在理论上,这等同于”汉明距离”(Hamming distance,在信息论中,两个等长字符串之间的汉明距离是两个字符串对应位置的不同字符的个数)。如果不相同的数据位数不超过5,就说明两张图像很相似;如果大于10,就说明这是两张不同的图像。
如果不相同的数据位数不超过5,就说明两张图像很相似;
如果大于10,就说明这是两张不同的图像。
代码
// similarity.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include
#include
#include
#include
#pragma comment(lib,"opencv_core2410d.lib")
#pragma comment(lib,"opencv_highgui2410d.lib")
#pragma comment(lib,"opencv_imgproc2410d.lib")
using namespace std;
int _tmain(int argc, _TCHAR* argv[])
{
string strSrcImageName = "swan.jpg";
cv::Mat matSrc, matSrc1, matSrc2;
matSrc = cv::imread(strSrcImageName, CV_LOAD_IMAGE_COLOR);
CV_Assert(matSrc.channels() == 3);
cv::resize(matSrc, matSrc1, cv::Size(357, 419), 0, 0, cv::INTER_NEAREST);
//cv::flip(matSrc1, matSrc1, 1);
cv::resize(matSrc, matSrc2, cv::Size(2177, 3233), 0, 0, cv::INTER_LANCZOS4);
cv::Mat matDst1, matDst2;
cv::resize(matSrc1, matDst1, cv::Size(8, 8), 0, 0, cv::INTER_CUBIC);
cv::resize(matSrc2, matDst2, cv::Size(8, 8), 0, 0, cv::INTER_CUBIC);
//update 20181206 for the bug cvtColor
cv::Mat temp1 = matDst1;
cv::Mat temp2 = matDst2;
cv::cvtColor(temp1 , matDst1, CV_BGR2GRAY);
cv::cvtColor(temp2 , matDst2, CV_BGR2GRAY);
int iAvg1 = 0, iAvg2 = 0;
int arr1[64], arr2[64];
for (int i = 0; i < 8; i++)
{
uchar* data1 = matDst1.ptr(i);
uchar* data2 = matDst2.ptr(i);
int tmp = i * 8;
for (int j = 0; j < 8; j++)
{
int tmp1 = tmp + j;
arr1[tmp1] = data1[j] / 4 * 4;
arr2[tmp1] = data2[j] / 4 * 4;
iAvg1 += arr1[tmp1];
iAvg2 += arr2[tmp1];
}
}
iAvg1 /= 64;
iAvg2 /= 64;
for (int i = 0; i < 64; i++)
{
arr1[i] = (arr1[i] >= iAvg1) ? 1 : 0;
arr2[i] = (arr2[i] >= iAvg2) ? 1 : 0;
}
int iDiffNum = 0;
for (int i = 0; i < 64; i++)
if (arr1[i] != arr2[i])
++iDiffNum;
cout<<"iDiffNum = "< 10)
cout<<"they are two different images!"< 我的运行效果:
我的运行效果,感觉很奇怪,压缩到8*8的图片以后,我感觉我的比较简单的,信息比较少的图片信息都丢失了。因为一直提醒我非常相似。。。但是如果图片信息比较多,还是可以的:
![]()
3.计算特征点
OpenCV的feature2d module中提供了从局部图像特征(Local image feature)的检测、特征向量(feature vector)的提取,到特征匹配的实现。其中的局部图像特征包括了常用的几种局部图像特征检测与描述算子,如FAST、SURF、SIFT、以及ORB。对于高维特征向量之间的匹配,OpenCV主要有两种方式:
1)BruteForce穷举法;
2)FLANN近似K近邻算法(包含了多种高维特征向量匹配的算法,例如随机森林等)。
feature2d module: http://docs.opencv.org/modules/features2d/doc/features2d.html
OpenCV FLANN: http://docs.opencv.org/modules/flann/doc/flann.html
FLANN: http://www.cs.ubc.ca/~mariusm/index.php/FLANN/FLANN
原文:
http://blog.csdn.net/icvpr/article/details/8491369
代码
//localfeature.h
#ifndef _FEATURE_H_
#define _FEATURE_H_
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
class Feature
{
public:
Feature();
~Feature();
Feature(const string& detectType, const string& extractType, const string& matchType);
public:
void detectKeypoints(const Mat& image, vector& keypoints); // 检测特征点
void extractDescriptors(const Mat& image, vector& keypoints, Mat& descriptor); // 提取特征向量
void bestMatch(const Mat& queryDescriptor, Mat& trainDescriptor, vector& matches); // 最近邻匹配
void knnMatch(const Mat& queryDescriptor, Mat& trainDescriptor, vector>& matches, int k); // K近邻匹配
void saveKeypoints(const Mat& image, const vector& keypoints, const string& saveFileName = ""); // 保存特征点
void saveMatches(const Mat& queryImage,
const vector& queryKeypoints,
const Mat& trainImage,
const vector& trainKeypoints,
const vector& matches,
const string& saveFileName = ""); // 保存匹配结果到图片中
private:
Ptr m_detector;
Ptr m_extractor;
Ptr m_matcher;
string m_detectType;
string m_extractType;
string m_matchType;
};
#endif
//localfeature.cpp
#include "stdafx.h"
#include "localfeature.h"
Feature::Feature()
{
m_detectType = "SIFT";
m_extractType = "SIFT";
m_matchType = "BruteForce";
}
Feature::~Feature()
{
}
Feature::Feature(const string& detectType, const string& extractType, const string& matchType)
{
assert(!detectType.empty());
assert(!extractType.empty());
assert(!matchType.empty());
m_detectType = detectType;
m_extractType = extractType;
m_matchType = matchType;
}
void Feature::detectKeypoints(const Mat& image, std::vector& keypoints)
{
assert(image.type() == CV_8UC1);
assert(!m_detectType.empty());
keypoints.clear();
initModule_nonfree();
m_detector = FeatureDetector::create(m_detectType);
m_detector->detect(image, keypoints);
}
void Feature::extractDescriptors(const Mat& image, std::vector& keypoints, Mat& descriptor)
{
assert(image.type() == CV_8UC1);
assert(!m_extractType.empty());
initModule_nonfree();
m_extractor = DescriptorExtractor::create(m_extractType);
m_extractor->compute(image, keypoints, descriptor);
}
void Feature::bestMatch(const Mat& queryDescriptor, Mat& trainDescriptor, std::vector& matches)
{
assert(!queryDescriptor.empty());
assert(!trainDescriptor.empty());
assert(!m_matchType.empty());
matches.clear();
m_matcher = DescriptorMatcher::create(m_matchType);
m_matcher->add(std::vector(1, trainDescriptor));
m_matcher->train();
m_matcher->match(queryDescriptor, matches);
}
void Feature::knnMatch(const Mat& queryDescriptor, Mat& trainDescriptor, std::vector>& matches, int k)
{
assert(k > 0);
assert(!queryDescriptor.empty());
assert(!trainDescriptor.empty());
assert(!m_matchType.empty());
matches.clear();
m_matcher = DescriptorMatcher::create(m_matchType);
m_matcher->add(std::vector(1, trainDescriptor));
m_matcher->train();
m_matcher->knnMatch(queryDescriptor, matches, k);
}
void Feature::saveKeypoints(const Mat& image, const vector& keypoints, const string& saveFileName)
{
assert(!saveFileName.empty());
Mat outImage;
cv::drawKeypoints(image, keypoints, outImage, Scalar(255,255,0), DrawMatchesFlags::DRAW_RICH_KEYPOINTS );
//
string saveKeypointsImgName = saveFileName + "_" + m_detectType + ".jpg";
imwrite(saveKeypointsImgName, outImage);
}
void Feature::saveMatches(const Mat& queryImage,
const vector& queryKeypoints,
const Mat& trainImage,
const vector& trainKeypoints,
const vector& matches,
const string& saveFileName)
{
assert(!saveFileName.empty());
Mat outImage;
cv::drawMatches(queryImage, queryKeypoints, trainImage, trainKeypoints, matches, outImage,
Scalar(255, 0, 0), Scalar(0, 255, 255), vector(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//
string saveMatchImgName = saveFileName + "_" + m_detectType + "_" + m_extractType + "_" + m_matchType + ".jpg";
imwrite(saveMatchImgName, outImage);
}
// main.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include
#include
#include
#include
#include
#include
#include "localfeature.h"
#pragma comment(lib,"opencv_core2410d.lib")
#pragma comment(lib,"opencv_highgui2410d.lib")
#pragma comment(lib,"opencv_imgproc2410d.lib")
#pragma comment(lib,"opencv_nonfree2410d.lib")
#pragma comment(lib,"opencv_features2d2410d.lib")
using namespace std;
int main(int argc, char** argv)
{
/*if (argc != 6)
{
cout << "wrong usage!" << endl;
cout << "usage: .exe FAST SIFT BruteForce queryImage trainImage" << endl;
return -1;
}*/
string detectorType = "SIFT";
string extractorType = "SIFT";
string matchType = "BruteForce";
string queryImagePath = "swan.jpg";
string trainImagePath = "swan.jpg";
Mat queryImage = imread(queryImagePath, CV_LOAD_IMAGE_GRAYSCALE);
if (queryImage.empty())
{
cout<<"read failed"<< endl;
return -1;
}
Mat trainImage = imread(trainImagePath, CV_LOAD_IMAGE_GRAYSCALE);
if (trainImage.empty())
{
cout<<"read failed"<< endl;
return -1;
}
Feature feature(detectorType, extractorType, matchType);
vector queryKeypoints, trainKeypoints;
feature.detectKeypoints(queryImage, queryKeypoints);
feature.detectKeypoints(trainImage, trainKeypoints);
Mat queryDescriptor, trainDescriptor;
feature.extractDescriptors(queryImage, queryKeypoints, queryDescriptor);
feature.extractDescriptors(trainImage, trainKeypoints, trainDescriptor);
vector matches;
feature.bestMatch(queryDescriptor, trainDescriptor, matches);
vector> knnmatches;
feature.knnMatch(queryDescriptor, trainDescriptor, knnmatches, 2);
Mat outImage;
feature.saveMatches(queryImage, queryKeypoints, trainImage, trainKeypoints, matches, "../");
return 0;
}
因为我是opencv3,不再是opencv2,所以有些代码稍微做了改动。
然而,当我cmake opencv3以后,我调用SIFT的方法,总是崩溃。万分不得其解,我的代码是这样的:
vector keypoints;
Mat img_keypoints;
Mat img_descriptor;
Ptr siftdector = xfeatures2d::SIFT::create(80);
siftdector->detectAndCompute(queryImage, noArray(), keypoints, img_descriptor);
drawKeypoints(queryImage, keypoints, img_keypoints, Scalar(0, 0, 255, 255), DrawMatchesFlags::DEFAULT);
imshow("Descrip", img_descriptor);
waitKey(0); 但是就是崩溃。我觉得可能是我cmake或者build opencv项目的时候出了问题。可以参考该博客查看该算法的结果:
https://blog.csdn.net/lv1247736542/article/details/80309984
如果我改出来bug了,我再来修改。
--------------------------------------END---------------------------------------