OpenDrive格式地图数据解析
OpenDrive地图解析代码可以参考,https://github.com/liuyf5231/opendriveparser
OpenDrive地图文件格式为xml,详细的介绍可以参考
http://www.opendrive.org/docs/OpenDRIVEFormatSpecRev1.4H.pdf
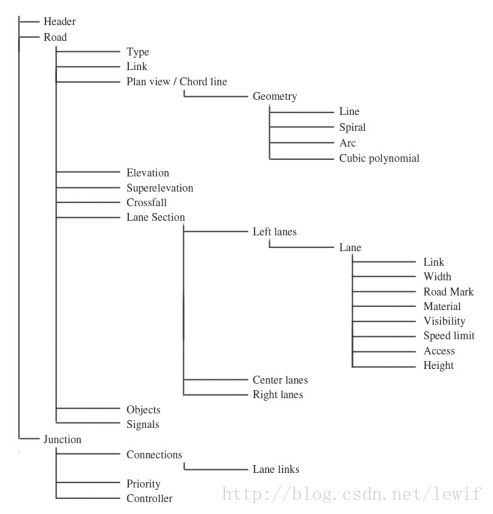
该xml文件中中包含了很多地图信息,例如Road、Junction等,下图是xml文件的主要结构,
下图为绘制地图的一个简单思路,读取OpenDRIVE文件,即地图数据,构造路网,通过渲染展示给用户。
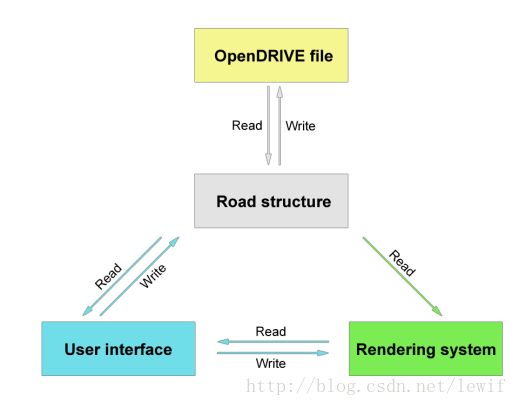
下面结合OpenDRIVE文件中的数据,介绍如何构造路网。
坐标系
首先需要考虑的是坐标系,我们平时看到的地图都是二维的,而地球是个椭球体,因此需要通过某种方式将椭球上的表示转换为二维平面。
在GIS中一般使用两种常用的坐标系类型:
- 全局坐标系或球坐标系,例如经纬度。这些坐标系通常称为地理坐标系(GCS)。
- 基于横轴墨卡托、亚尔勃斯等积或罗宾森等地图投影的投影坐标系,这些地图投影(以及其他多种地图投影模型)提供了各种机制将地球球面的地图投影到二维笛卡尔坐标平面上。(PCS)
GCS使用三维球面来定义地球上的位置。
PCS在二维平面中进行定义。与地理坐标系不同,在二维空间范围内,投影坐标系的长度、角度和面积恒定。投影坐标系始终基于地理坐标系,而后者则是基于球体或旋转椭球体的。

上图为经过某种投影变换后的二维投影图(本文记作xy坐标系),x表示经度(正,东经,负,西经),y表示纬度(正,北纬,负,南纬)。
在OpenDRIVE数据中,具体体现在,
geoReference元素定义了该文件使用的投影坐标系,其中地理坐标系为WGS-84,而投影坐标系采用的是Transverse_Mercator,横轴墨卡托投影。
在OpenDRIVE数据中大量使用的位置信息都是投影后的xy坐标,而除了该投影坐标系,还定义了一种轨迹坐标系,如下所示,

s坐标是沿着reference line的,关于reference line后面介绍,长度是在xy坐标下计算的,应该是通过积分计算的吧(例如下图中的123.45)。
t坐标,是相对于reference line的侧向位置,左正,右负。

reference line
reference line是路网结构中一个很重要的概念,绘制地图的时候先是画reference line,reference line包含xy位置坐标、路的形状属性,然后在reference line基础上再去画其他其他元素。
下图是OpenDRIVE中路网结构中的一个road,该road有三部分组成,蓝色的reference line,车道lane,车道lane的其他feature(限速等)。
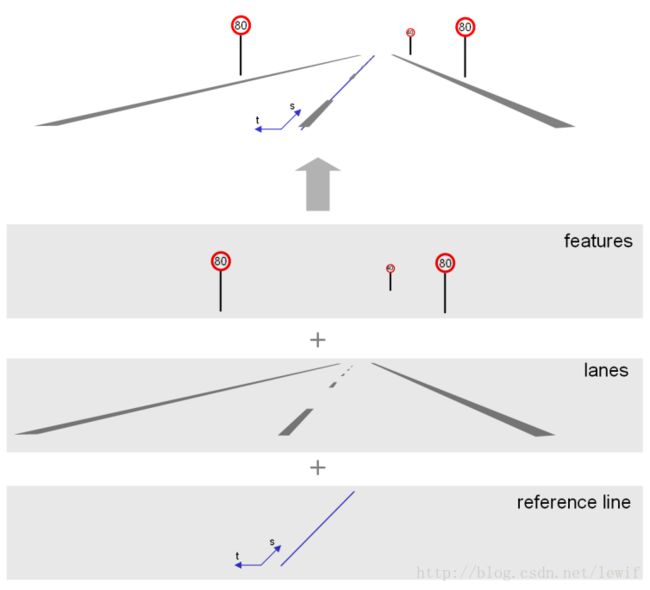
整个地图路网由很多的road构成,而每个road中都会包含reference line,就是一条线,它没有宽度
All roads consist of a reference line which defines the basic geometry (arcs, straight lines etc.). Along
the reference line, various properties of the road can be defined.
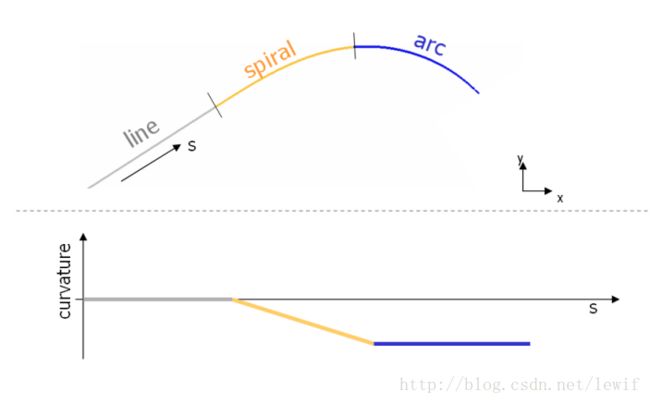
reference line,线条有好几种类型,直线,螺旋线等,
The geometry of the reference line is described as a sequence of primitives of various types. The
available primitives are:
- straight line (constant zero curvature)
- spiral (linear change of curvature)
- curve (constant non-zero curvature along run-length)
- cubic polynom
- parametric cubic curves
下图为几种常见的reference line,注意图中的两个坐标系,xy和st
而在OpenDRIVE数据中,reference line体现在planView元素下的geometry,顾名思义,俯视图下的road几何形状,该road是条直线,螺旋线等等。

一个road的并不是只有一根reference line,因为假如一个road长度为100米,有可能这100米有些地方是直路,有些地方是拐弯的曲线,每一条都是一个geometry标签,通过s(起始位置)和长度进行连接(后一个s是前一个的length)。
而属性中的x,y,hdg分别是投影坐标系xy下的起始点位置以及起始点的角度(定义了曲线方程以及起始点坐标和长度,曲线肯定就能画出来了)。
车道lane
一个road中包含了很多的车道lane(lanes),而车道(lane)本身有宽度(width),以及虚线、实线等属性参数(roadMark)。结合这些参数,我们就能在reference line的基础上将车道画出来。
下面是OpenDRIVE中对应的车道相关的元素,
在lanes下还有个laneSection车道横截面的概念,一个road包含了数个laneSection,每个laneSection中又包含了车道lane,在一个laneSection中车道lane是顺着reference line分为left,center,right。
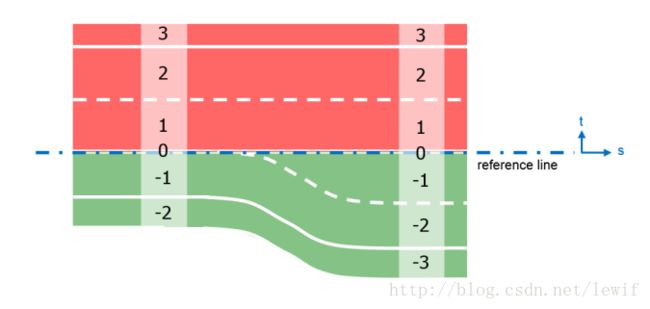
reference line是center,没有宽度width,只是一条线。
left的lane的id为正,right为负。上图中坐边定义了5条车道,1,2,3,-1,-2,而右边多了一条-3。
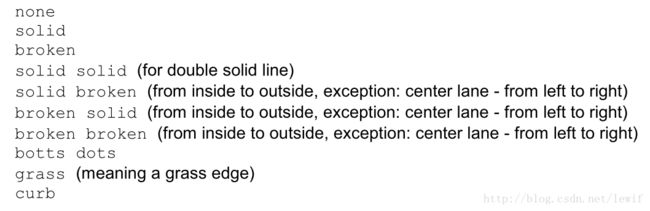
此外,在lane元素中,width元素定义了车道的宽度,都是基于曲线进行拟合的。roadMark元素定义了车道线的属性,OpenDrive中规定的车道线的属性如下所示,有实线,虚线等。
通过上面的介绍,已经画完了一个road,而前面提到OpenDrive地图是由多个road组成,下面介绍如何将这些road连接起来。
road连接
road之间的连接定义了两种(每个road有唯一的ID),一种是有明确的连接关系,例如前后只有一条road,那么通过
successor/predecessor进行连接(例如下图中的road 1和road 2),
In order to navigate through a road network, the application must know about the linkage between different roads. Two types of linkage are possible:
- successor/predecessor linkage (standard linkage)
- junctions
Whenever the linkage between two roads is clear, a standard linkage information is sufficient. A junction is required when the successor or predecessor relationship of a road is ambiguous. Here, the application needs to select one of several possibilities.
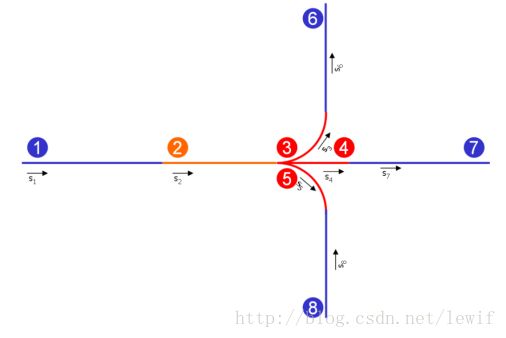
如果前后的连接关系不是很明确,就需要一个junctions,上图road 2的后置节点successor就无法确定,

在OpenDrive中,将上图中的3,4,5称为junction,road 3,4,5,称为connecting road,而2称为incoming road,6,7,8称为outgoing road。
具体体现在OpenDrive中如下所示,junction 41的incomingRoad为road 42,而road 55属于junction中的connectingRoad,
由于road中又包含了很多lanes车道,所以需要将车道的连接关系也表示清楚,上面的laneLink元素就是用来连接lanes的,对road 42和55的-3,-2,-1进行连接(center右边的车道)。
一个完整的例子

上图体现了OpenDrive中的路网连接关系,分为:
- 左边road 10,reference line黑线所在位置,左边有lane 1 ,2,右边为lane -1,-2,-3
- 上边road 60,reference line黑线所在位置,左边有lane 1 ,2,右边为lane -1,-2
- 右边road 50,reference line黑线所在位置,左边有lane 1 ,2,右边为lane -1,-2,-3
- 下边road 70,reference line黑线所在位置,左边有lane 1 ,2,右边为lane -1,-2
- 中间是一个Junction,包含road 40, road 20,road 30,都是connectingRoad,对应的连接关系为road 10 -1 lane (incoming road)<—>road40(connectingRoad) -1 lane,road 10 -2 lane (incoming road)<—>road30(connectingRoad) -1 lane,road 10 -1 lane (incoming road)<—>road20(connectingRoad) -1 lane,road 10 -2 lane (incoming road)<—>road20(connectingRoad) -2 lane,而outgoingRoad与之类似。
总之,对于一个road来说,先确定reference line,有了reference line的几何形状和位置,然后再确定reference line左右的车道lane,车道lane又有实线和虚线等属性;road 和road之间通过普通连接和Junction进行连接,同时还要将road中的相关车道进行连接。