Linux内核调试技术——进程上下文R状态死锁监测
前一篇博文介绍了内核监测D状态死锁的hung task机制,本文介绍另一种死锁状态的监测手段——R状态死锁监测。R状态死锁指的是某一任务一直处于TASK_RUNNING态且一直占用着CPU,从而导致其他进程得不到调度而饿死的情况。一般情况下,R状态死锁较可能是由于程序出现死循环导致的,可以出现在内核态的进程上下文中(内核配置为非抢占式,soft lockup),也可以出现在中断上下文中的中断处理程序中(hard lockup)。异常的程序一直运行,CPU无法调度到其他的任务运行,对于单CPU的设备,则直接的表现就是“死机”。这种死锁现象较难定位,内核也同样提供了一种检测手段来检测这种死锁并向用户发出告警——LOCKUP_DETECTOR,它可支持监测进程上下文和中断上下文中的R状态死锁(SOFTLOCKUP_DETECTOR和HARDLOCKUP_DETECTOR),由于HARDLOCKUP_DETECTOR需要nmi中断的支持且目前的arm32环境并不支持,本文仅分析其中SOFTLOCKUP_DETECTOR中的原理及实现方式,并给出一个示例。
一、lockup detector机制分析
lockup detector机制在内核代码的kernel/watchdog.c中实现,本文以Linux 4.1.15版本源码为例进行分析。首先了解其背后的设计原理:利用进程上下文、中断、nmi中断的不同优先级实现死锁监测。它们3者的优先级关系为“进程上下文 < 中断 < nmi中断”,其中进程上下文优先级最低,可通过中断来进行监测进程的运行状态,nmi中断的优先级最高,它是一种不可屏蔽的中断,在中断上下文中发生死锁时,nmi中断处理也可正常进入,因此可用来监测中断中的死锁。不过可惜的是目前绝大多数的arm32芯片都不支持nmi中断,也包括我手中树莓派的bcm2835芯片。从程序的命名中就可以看出,该程序其实实现了一种软看门狗的功能,下面给出整体的软件流程框图:
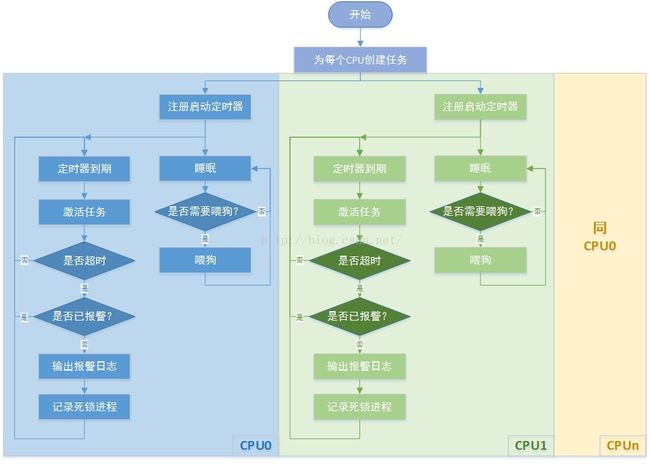
该程序为每个cpu创建了一个进程和一个高精度定时器,其中进程用来喂狗,定时器用来唤醒喂狗进程和检测是否存在死锁进程,在检测到死锁进程后就触发报警,接下来详细分析源代码:
void __init lockup_detector_init(void)
{
set_sample_period();
if (watchdog_enabled)
watchdog_enable_all_cpus();
}
static int __init softlockup_panic_setup(char *str)
{
softlockup_panic = simple_strtoul(str, NULL, 0);
return 1;
}
__setup("softlockup_panic=", softlockup_panic_setup);
static int __init nowatchdog_setup(char *str)
{
watchdog_enabled = 0;
return 1;
}
__setup("nowatchdog", nowatchdog_setup);
static int __init nosoftlockup_setup(char *str)
{
watchdog_enabled &= ~SOFT_WATCHDOG_ENABLED;
return 1;
}
__setup("nosoftlockup", nosoftlockup_setup);
static int watchdog_enable_all_cpus(void)
{
int err = 0;
if (!watchdog_running) {
err = smpboot_register_percpu_thread(&watchdog_threads);
if (err)
pr_err("Failed to create watchdog threads, disabled\n");
else
watchdog_running = 1;
} else {
/*
* Enable/disable the lockup detectors or
* change the sample period 'on the fly'.
*/
update_watchdog_all_cpus();
}
return err;
}static struct smp_hotplug_thread watchdog_threads = {
.store = &softlockup_watchdog,
.thread_should_run = watchdog_should_run,
.thread_fn = watchdog,
.thread_comm = "watchdog/%u",
.setup = watchdog_enable,
.cleanup = watchdog_cleanup,
.park = watchdog_disable,
.unpark = watchdog_enable,
};下面来简单看一下smpboot_register_percpu_thread()函数是如何为每个cpu创建任务的,同时又在何处调用上述的那些回调函数的(kernel/smpboot.c):
int smpboot_register_percpu_thread(struct smp_hotplug_thread *plug_thread)
{
unsigned int cpu;
int ret = 0;
get_online_cpus();
mutex_lock(&smpboot_threads_lock);
for_each_online_cpu(cpu) {
ret = __smpboot_create_thread(plug_thread, cpu);
if (ret) {
smpboot_destroy_threads(plug_thread);
goto out;
}
smpboot_unpark_thread(plug_thread, cpu);
}
list_add(&plug_thread->list, &hotplug_threads);
out:
mutex_unlock(&smpboot_threads_lock);
put_online_cpus();
return ret;
}
EXPORT_SYMBOL_GPL(smpboot_register_percpu_thread);static int
__smpboot_create_thread(struct smp_hotplug_thread *ht, unsigned int cpu)
{
struct task_struct *tsk = *per_cpu_ptr(ht->store, cpu);
......
tsk = kthread_create_on_cpu(smpboot_thread_fn, td, cpu,
ht->thread_comm);
......
return 0;
}static int smpboot_thread_fn(void *data)
{
struct smpboot_thread_data *td = data;
struct smp_hotplug_thread *ht = td->ht;
while (1) {
set_current_state(TASK_INTERRUPTIBLE);
preempt_disable();
if (kthread_should_stop()) {
__set_current_state(TASK_RUNNING);
preempt_enable();
if (ht->cleanup)
ht->cleanup(td->cpu, cpu_online(td->cpu));
kfree(td);
return 0;
}
if (kthread_should_park()) {
__set_current_state(TASK_RUNNING);
preempt_enable();
if (ht->park && td->status == HP_THREAD_ACTIVE) {
BUG_ON(td->cpu != smp_processor_id());
ht->park(td->cpu);
td->status = HP_THREAD_PARKED;
}
kthread_parkme();
/* We might have been woken for stop */
continue;
}
BUG_ON(td->cpu != smp_processor_id());
/* Check for state change setup */
switch (td->status) {
case HP_THREAD_NONE:
__set_current_state(TASK_RUNNING);
preempt_enable();
if (ht->setup)
ht->setup(td->cpu);
td->status = HP_THREAD_ACTIVE;
continue;
case HP_THREAD_PARKED:
__set_current_state(TASK_RUNNING);
preempt_enable();
if (ht->unpark)
ht->unpark(td->cpu);
td->status = HP_THREAD_ACTIVE;
continue;
}
if (!ht->thread_should_run(td->cpu)) {
preempt_enable_no_resched();
schedule();
} else {
__set_current_state(TASK_RUNNING);
preempt_enable();
ht->thread_fn(td->cpu);
}
}
}static void watchdog_enable(unsigned int cpu)
{
struct hrtimer *hrtimer = raw_cpu_ptr(&watchdog_hrtimer);
/* kick off the timer for the hardlockup detector */
hrtimer_init(hrtimer, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
hrtimer->function = watchdog_timer_fn;
/* Enable the perf event */
watchdog_nmi_enable(cpu);
/* done here because hrtimer_start can only pin to smp_processor_id() */
hrtimer_start(hrtimer, ns_to_ktime(sample_period),
HRTIMER_MODE_REL_PINNED);
/* initialize timestamp */
watchdog_set_prio(SCHED_FIFO, MAX_RT_PRIO - 1);
__touch_watchdog();
}static void __touch_watchdog(void)
{
__this_cpu_write(watchdog_touch_ts, get_timestamp());
}定时器初始化完成后,接下来smpboot_thread_fn()函数就会调用thread_should_run()回调函数watchdog_should_run():
static int watchdog_should_run(unsigned int cpu)
{
return __this_cpu_read(hrtimer_interrupts) !=
__this_cpu_read(soft_lockup_hrtimer_cnt);
}/* watchdog kicker functions */
static enum hrtimer_restart watchdog_timer_fn(struct hrtimer *hrtimer)
{
unsigned long touch_ts = __this_cpu_read(watchdog_touch_ts);
struct pt_regs *regs = get_irq_regs();
int duration;
int softlockup_all_cpu_backtrace = sysctl_softlockup_all_cpu_backtrace;
/* kick the hardlockup detector */
watchdog_interrupt_count();
/* kick the softlockup detector */
wake_up_process(__this_cpu_read(softlockup_watchdog));
/* .. and repeat */
hrtimer_forward_now(hrtimer, ns_to_ktime(sample_period));然后尝试唤醒已经睡眠的喂狗线程(注意,由于这里改变了hrtimer_interrupts值,前文中的watchdog_should_run自然就会返回TRUE了,那么就可以执行注册的主函数了)。接着本函数继续注册下一次的定时器到期时间。
if (touch_ts == 0) {
if (unlikely(__this_cpu_read(softlockup_touch_sync))) {
/*
* If the time stamp was touched atomically
* make sure the scheduler tick is up to date.
*/
__this_cpu_write(softlockup_touch_sync, false);
sched_clock_tick();
}
/* Clear the guest paused flag on watchdog reset */
kvm_check_and_clear_guest_paused();
__touch_watchdog();
return HRTIMER_RESTART;
} /* check for a softlockup
* This is done by making sure a high priority task is
* being scheduled. The task touches the watchdog to
* indicate it is getting cpu time. If it hasn't then
* this is a good indication some task is hogging the cpu
*/
duration = is_softlockup(touch_ts);static int is_softlockup(unsigned long touch_ts)
{
unsigned long now = get_timestamp();
if (watchdog_enabled & SOFT_WATCHDOG_ENABLED) {
/* Warn about unreasonable delays. */
if (time_after(now, touch_ts + get_softlockup_thresh()))
return now - touch_ts;
}
return 0;
} if (unlikely(duration)) {
......
/* only warn once */
if (__this_cpu_read(soft_watchdog_warn) == true) {
/*
* When multiple processes are causing softlockups the
* softlockup detector only warns on the first one
* because the code relies on a full quiet cycle to
* re-arm. The second process prevents the quiet cycle
* and never gets reported. Use task pointers to detect
* this.
*/
if (__this_cpu_read(softlockup_task_ptr_saved) !=
current) {
__this_cpu_write(soft_watchdog_warn, false);
__touch_watchdog();
}
return HRTIMER_RESTART;
} if (softlockup_all_cpu_backtrace) {
/* Prevent multiple soft-lockup reports if one cpu is already
* engaged in dumping cpu back traces
*/
if (test_and_set_bit(0, &soft_lockup_nmi_warn)) {
/* Someone else will report us. Let's give up */
__this_cpu_write(soft_watchdog_warn, true);
return HRTIMER_RESTART;
}
} pr_emerg("BUG: soft lockup - CPU#%d stuck for %us! [%s:%d]\n",
smp_processor_id(), duration,
current->comm, task_pid_nr(current));
__this_cpu_write(softlockup_task_ptr_saved, current);
print_modules();
print_irqtrace_events(current);
if (regs)
show_regs(regs);
else
dump_stack(); if (softlockup_all_cpu_backtrace) {
/* Avoid generating two back traces for current
* given that one is already made above
*/
trigger_allbutself_cpu_backtrace();
clear_bit(0, &soft_lockup_nmi_warn);
/* Barrier to sync with other cpus */
smp_mb__after_atomic();
} add_taint(TAINT_SOFTLOCKUP, LOCKDEP_STILL_OK);
if (softlockup_panic)
panic("softlockup: hung tasks");
__this_cpu_write(soft_watchdog_warn, true);static void watchdog(unsigned int cpu)
{
__this_cpu_write(soft_lockup_hrtimer_cnt,
__this_cpu_read(hrtimer_interrupts));
__touch_watchdog();
/*
* watchdog_nmi_enable() clears the NMI_WATCHDOG_ENABLED bit in the
* failure path. Check for failures that can occur asynchronously -
* for example, when CPUs are on-lined - and shut down the hardware
* perf event on each CPU accordingly.
*
* The only non-obvious place this bit can be cleared is through
* watchdog_nmi_enable(), so a pr_info() is placed there. Placing a
* pr_info here would be too noisy as it would result in a message
* every few seconds if the hardlockup was disabled but the softlockup
* enabled.
*/
if (!(watchdog_enabled & NMI_WATCHDOG_ENABLED))
watchdog_nmi_disable(cpu);
}
以上就是进程上下文中的R状态死锁的核心监测代码,该程序还提供了一些可以通过sysctrl控制启停和超时时间等的接口,比较简单就不分析了。从以上实现可以看出其本质就是利用了hr定时器中断处理函数周期性的唤醒进程执行软喂狗动作,同时自身则检测软看门狗是否超时。在正常的情况下,当前cpu的定时器中唤醒的喂狗进程一定是能够得到调度的(视cpu负荷情况可能略有延时),即是不可能超过设定的超时时间的,但是如果当前cpu中的某一个进程占用cpu时间超过了设定的超时时间(20s),就会直接导致软看门狗超时并触发一次报警动作,如果这个进程一直不释放cpu(例如while循环),那么也只会报警一次,反之会重新开启报警功能。
二、示例演示
演示环境:树莓派b(Linux 4.1.15)
1、首先确认启用内核配置
Kernel hacking --->
Debug Lockups and Hangs --->
[*] Detect Hard and Soft Lockups
[*] Panic (Reboot) On Soft Lockups(可选)
2、然后确认内核调度策略配置
Kernel Features --->
Preemption Model (Voluntary Kernel Preemption (Desktop))
( ) No Forced Preemption (Server)(X) Voluntary Kernel Preemption (Desktop)
( ) Preemptible Kernel (Low-Latency Desktop)
注意调度策略需要配置为非抢占式的内核,若是抢占式的,则测试程序会无效(因为其他内核进程可能会主动抢占死锁的进程)。
3、编写演示程序
#include
#include
#include
static int __init rlock_init(void)
{
while(1);
return 0;
}
static void __exit rlock_exit(void)
{
return;
}
module_init(rlock_init);
module_exit(rlock_exit);
MODULE_LICENSE("GPL"); 在树莓派中加载该模块后直接中断就”挂死“了,然后再约20s后内核打印如下:
root@apple:~# insmod rlock.ko
[ 60.254450] NMI watchdog: BUG: soft lockup - CPU#0 stuck for 23s! [insmod:515]
[ 60.261684] Modules linked in: rlock(O+) sg bcm2835_gpiomem bcm2835_wdt(O) uio_pdrv_genirq uio
[ 60.270344] CPU: 0 PID: 515 Comm: insmod Tainted: G O 4.1.15 #8
[ 60.277382] Hardware name: BCM2708
[ 60.280783] task: c591df60 ti: c5eaa000 task.ti: c5eaa000
[ 60.286189] PC is at rlock_init+0xc/0x10 [rlock]
[ 60.290812] LR is at do_one_initcall+0x90/0x1e8
[ 60.295342] pc : [
[ 60.295342] sp : c5eabdc8 ip : c5eabdd8 fp : c5eabdd4
[ 60.306803] r10: 00000000 r9 : 00000124 r8 : bf02e000
[ 60.312020] r7 : bf02c0a4 r6 : c5eed660 r5 : c0bbd6e8 r4 : c0bbd6e8
[ 60.318539] r3 : 00000000 r2 : c6c01f00 r1 : 60000013 r0 : 60000013
[ 60.325058] Flags: nZCv IRQs on FIQs on Mode SVC_32 ISA ARM Segment user
[ 60.332183] Control: 00c5387d Table: 05828008 DAC: 00000015
[ 60.337924] CPU: 0 PID: 515 Comm: insmod Tainted: G O 4.1.15 #8
[ 60.344958] Hardware name: BCM2708
[ 60.348410] [
[ 60.356168] [
[ 60.363398] [
[ 60.370547] [
[ 60.378482] [
[ 60.386668] [
[ 60.394942] [
[ 60.403911] [
[ 60.413481] [
[ 60.422359] [
[ 60.430712] [
[ 60.439244] [
[ 60.447251] [
[ 60.454485] [
[ 60.461613] Exception stack(0xc5eabd80 to 0xc5eabdc8)
[ 60.466670] bd80: 60000013 60000013 c6c01f00 00000000 c0bbd6e8 c0bbd6e8 c5eed660 bf02c0a4
[ 60.474845] bda0: bf02e000 00000124 00000000 c5eabdd4 c5eabdd8 c5eabdc8 c0009558 bf02e00c
[ 60.483010] bdc0: 60000013 ffffffff
[ 60.486515] [
[ 60.494271] [
[ 60.502721] [
[ 60.510819] [
[ 60.518827] [
[ 60.526662] [
[ 60.534745] Kernel panic - not syncing: softlockup: hung tasks
[ 60.540577] CPU: 0 PID: 515 Comm: insmod Tainted: G O L 4.1.15 #8
[ 60.547613] Hardware name: BCM2708
[ 60.551033] [
[ 60.558781] [
[ 60.566005] [
[ 60.572885] [
[ 60.580464] [
[ 60.588648] [
[ 60.596917] [
[ 60.605881] [
[ 60.615450] [
[ 60.624326] [
[ 60.632680] [
[ 60.641211] [
[ 60.649218] [
[ 60.656450] [
[ 60.663578] Exception stack(0xc5eabd80 to 0xc5eabdc8)
[ 60.668633] bd80: 60000013 60000013 c6c01f00 00000000 c0bbd6e8 c0bbd6e8 c5eed660 bf02c0a4
[ 60.676806] bda0: bf02e000 00000124 00000000 c5eabdd4 c5eabdd8 c5eabdc8 c0009558 bf02e00c
[ 60.684972] bdc0: 60000013 ffffffff
[ 60.688477] [
[ 60.696227] [
[ 60.704671] [
[ 60.712765] [
[ 60.720771] [
[ 60.728607] [
PANIC: softlockup: hung tasks