【VC++、OpenCV3.4】自定义线性滤波——卷积操作
卷积公式:

卷积的作用:模糊图像、提取边缘、图像增强(锐化)等。
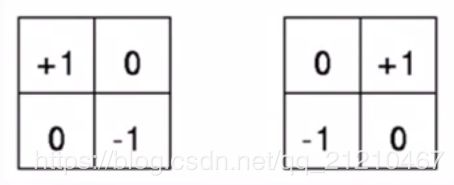
常见卷积核算子:Robert算子,对45度和135度的像素变化敏感。
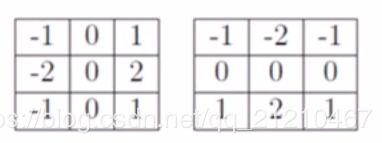
Sobel算子:分别对水平方向和数值方向的像素变化敏感
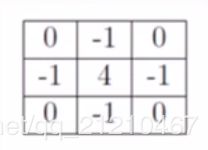
拉普拉斯算子:用于边缘提取
#include
#include
#include
using namespace cv;
Mat src, dst, dst1, dst2, dst3,dst4;
const String path = "C:\\Users\\admin\\Desktop\\demo.jpg";
const String Output = "Src window";
const String Output1 = "Robert window";
const String Output2 = "Sobel window";
const String Output21 = "Sobel1 window";
const String Output3 = "Laplace window";
int main(int argv, char** argc) {
src = imread(path, IMREAD_REDUCED_COLOR_2);
if (!src.data)
{
printf("Could not load the pic demo...");
return false;
}
namedWindow(Output, CV_WINDOW_AUTOSIZE);
Mat kernel1 = (Mat_(2, 2) << 1, 0, 0, 1);
Mat kernel2 = (Mat_(2, 2) << 0, 1, 1, 0);
Mat kernel3 = (Mat_(3, 3) << -1,0,1,-2,0,2,-1,0,1);
Mat kernel4 = (Mat_(3, 3) << -1,-2 ,-1, 0, 0,0, 1, 2, 1);
Mat kernel5 = (Mat_(3, 3) << 0, -1, 0, -1, 4,-1, 0, -1, 0);
cvtColor(src, src, CV_BGR2GRAY);
imshow(Output, src);
//Robert
filter2D(src, dst, -1, kernel2, Point(-1, -1));
namedWindow(Output1, CV_WINDOW_AUTOSIZE);
imshow(Output1, dst);
//Sobel
filter2D(src, dst2, -1, kernel3, Point(-1, -1));
namedWindow(Output2, CV_WINDOW_AUTOSIZE);
imshow(Output2, dst2);
//Sobel1
filter2D(src, dst3, -1, kernel4, Point(-1, -1));
namedWindow(Output21, CV_WINDOW_AUTOSIZE);
imshow(Output21, dst3);
//Laplace
filter2D(src, dst4, -1, kernel5, Point(-1, -1));
namedWindow(Output3, CV_WINDOW_AUTOSIZE);
imshow(Output3, dst4);
waitKey(0);
return 0;
} 效果:
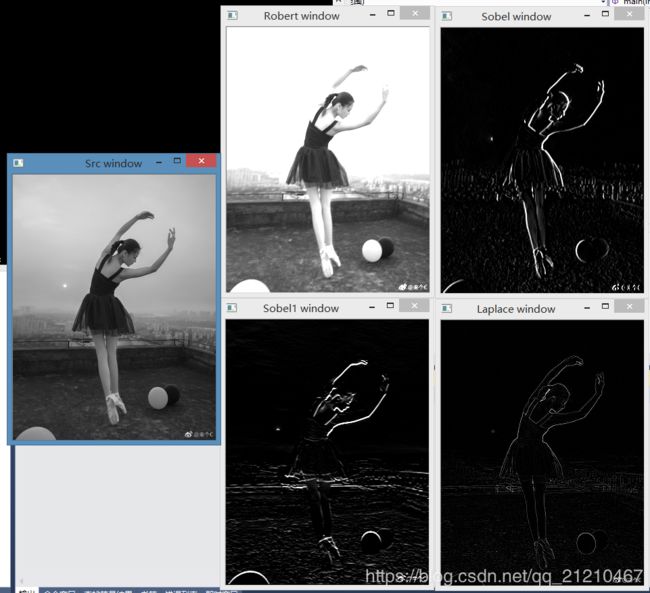
卷积:
int c = 0;
int ksize = 3;
int index = 0;
namedWindow(Output4, CV_WINDOW_AUTOSIZE);
while (true)
{
waitKey(500);
if ((char) c==27)//ESC
{
break;
}
ksize = 4 + (index % 5) * 2 + 1;
Mat kernels = Mat::ones(Size(ksize, ksize), CV_32F) / (float)(ksize*ksize);
filter2D(src, dst, -1, kernels, Point(-1, -1));
index++;
imshow(Output4, dst);
}