深度学习之3D卷积神经网络
一、概述
3D CNN主要运用在视频分类、动作识别等领域,它是在2D CNN的基础上改变而来。由于2D CNN不能很好的捕获时序上的信息,因此我们采用3D CNN,这样就能将视频中时序信息进行很好的利用。首先我们介绍一下2D CNN与3D CNN的区别。如图1所示,a)和b)分别为2D卷积用于单通道图像和多通道图像的情况(此处多通道图像可以指同一张图片的3个颜色通道,也指多张堆叠在一起的图片,即一小段视频),对于一个滤波器,输出为一张二维的特征图,多通道的信息被完全压缩了。而c)中的3D卷积的输出仍然为3D的特征图。也就是说采用2D CNN对视频进行操作的方式,一般都是对视频的每一帧图像分别利用CNN来进行识别,这种方式的识别没有考虑到时间维度的帧间运动信息,而使用3D CNN能更好的捕获视频中的时间和空间的特征信息。
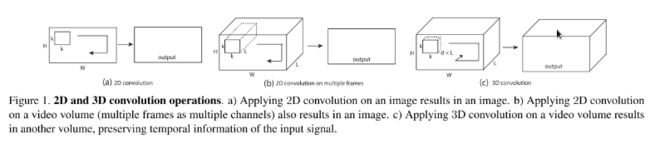
图一
二、原理
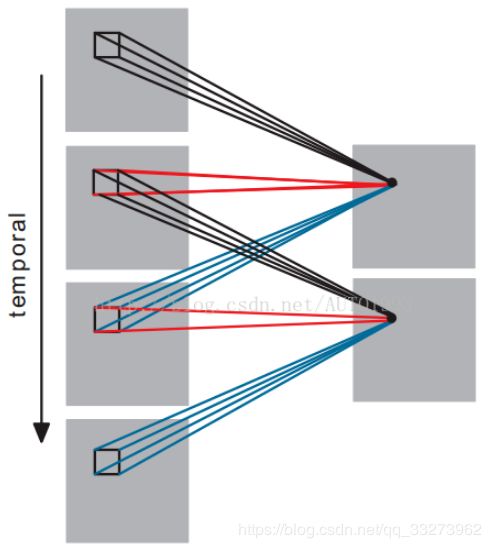
首先我们看一下3D CNN是如何对时间维度进行操作的,如图二所示,我们将时间维度看成是第三维,这里是对连续的四帧图像进行卷积操作,3D卷积是通过堆叠多个连续的帧组成一个立方体,然后在立方体中运用3D卷积核。在这个结构中,卷积层中每一个特征map都会与上一层中多个邻近的连续帧相连,因此捕捉运动信息。
图二
注:3D卷积核只能从cube中提取一种类型的特征,因为在整个cube中卷积核的权值都是一样的,也就是共享权值,都是同一个卷积核(图中同一个颜色的连接线表示相同的权值)。我们可以采用多种卷积核,以提取多种特征 。
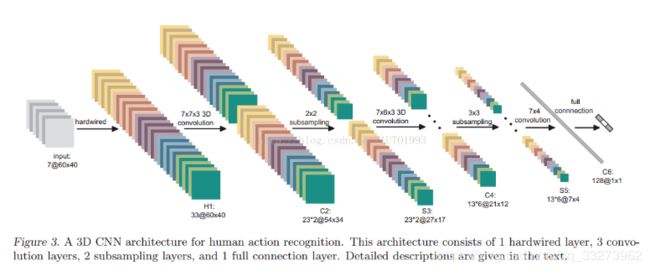
图三是3D卷积神经网络的整体架构
图三
input—>H1
神经网络的输入为7张大小为60*40的连续帧,7张帧通过事先设定硬核(hardwired kernels)获得5种不同特征:灰度、x方向梯度、y方向梯度、x方向光流、y方向光流,前面三个通道的信息可以直接对每帧分别操作获取,后面的光流(x,y)则需要利用两帧的信息才能提取,因此H1层的特征maps数量:(7+7+7+6+6=33),特征maps的大小依然是60* 40。
H1—>C2
用两个7*7*3的3D卷积核对5个channels分别进行卷积,获得两个系列,每个系列5个channels(7* 7表示空间维度,3表示时间维度,也就是每次操作3帧图像),同时,为了增加特征maps的个数,在这一层采用了两种不同的3D卷积核,因此C2层的特征maps数量为:(((7-3)+1)* 3+((6-3)+1)* 2)* 2=23* 2。这里右乘的2表示两种卷积核。特征maps的大小为:((60-7)+1)* ((40-7)+1)=54 * 34。然后为卷积结果加上偏置套一个tanh函数进行输出。(典型神经网。)

C2—>S3
2x2池化,下采样。下采样之后的特征maps数量保持不变,因此S3层的特征maps数量为:23 *2。特征maps的大小为:((54 / 2) * (34 /2)=27 *17
S3—>C4
为了提取更多的图像特征,用三个7*6*3的3D卷积核分别对各个系列各个channels进行卷积,获得6个系列,每个系列依旧5个channels的大量maps。
我们知道,从输入的7帧图像获得了5个通道的信息,因此结合总图S3的上面一组特征maps的数量为((7-3)+1) * 3+((6-3)+1) * 2=23,可以获得各个通道在S3层的数量分布:
前面的乘3表示gray通道maps数量= gradient-x通道maps数量= gradient-y通道maps数量=(7-3)+1)=5;
后面的乘2表示optflow-x通道maps数量=optflow-y通道maps数量=(6-3)+1=4;
假设对总图S3的上面一组特征maps采用一种7 6 3的3D卷积核进行卷积就可以获得:
((5-3)+1)* 3+((4-3)+1)* 2=9+4=13;
三种不同的3D卷积核就可获得13* 3个特征maps,同理对总图S3的下面一组特征maps采用三种不同的卷积核进行卷积操作也可以获得13*3个特征maps,
因此C4层的特征maps数量:13* 3* 2=13* 6
C4层的特征maps的大小为:((27-7)+1)* ((17-6)+1)=21*12
然后加偏置套tanh。
C4—>S5
3X3池化,下采样。此时每个maps的大小:7* 4。通道maps数量分布情况如下:
gray通道maps数量= gradient-x通道maps数量= gradient-y通道maps数量=3
optflow-x通道maps数量=optflow-y通道maps数量=2;
S5—>C6
进行了两次3D卷积之后,时间上的维数已经被压缩得无法再次进行3D卷积(两个光流channels只有两个maps)。此时对各个maps用7*42D卷积核进行卷积,加偏置套tanh(烦死了!),获得C6层。C6层维度已经相当小,flatten为一列有128个节点的神经网络层。
C6—>output
经典神经网络模型两层之间全链接,output的节点数目随标签而定。
三、应用
这里可以将3D卷积神经网络应用在卷积自编码器上,最近看了一篇3D CAE在高光谱图像上应用的文章:LEARNING SENSOR-SPECIFIC FEATURES FOR HYPERSPECTRAL IMAGES VIA 3-DIMENSIONAL CONVOLUTIONAL AUTOENCODER。这篇文章将高光谱图像的波段这一维转化成3D卷积神经网络的时间维,在卷积自编码器中使用3D卷积,得到了很好的效果,下面是其中卷积核和通道的变化表格。


参考:
https://blog.csdn.net/qq_25737169/article/details/75072014
https://blog.csdn.net/AUTO1993/article/details/70948249
https://www.cnblogs.com/Ponys/p/3450177.html